
Abstract
Linear differential equation
where is a positive continuous function and delay r is a positive constant, is considered for . It is proved that, under certain assumptions on the function and delay r, a class of positive linear initial functions defines dominant positive solutions with positive limit for .
MSC:34K15, 34K25.
Similar content being viewed by others
1 Introduction
This article is devoted to the problem of the asymptotic behavior of solutions of delayed equations of the type
with a positive continuous function on the set , , in the non-oscillatory case. The following results on the asymptotic behavior of solutions, needed in the following analysis, are taken from [1] (see [2] as well).
Theorem 1 (Theorem 18 in [1])
Let there exist a positive solution of (1) on . Then there are two positive solutions and of (1) on satisfying
Moreover, every solution y of (1) on is represented by the formula
where and a coefficient depends on y.
In [2] it is shown that in representation (3) an arbitrary couple and of two positive solutions of (1) satisfying (2) can be used, i.e., the following theorem holds.
Theorem 2 Assume that and are two positive solutions of (1) on satisfying (2). Then every solution y of (1) on is represented by formula (3), where and a coefficient depends on y.
This is the reason for introducing the following definition.
Definition 1 [2]
Let and be fixed positive solutions of (1) on with property (2). Then is called a pair of dominant and subdominant solutions on .
We note that in the literature one can find numerous criteria of positivity of solutions not only to (1), but more complicated, as well as lots of properties of such solutions and explanation of their importance (see, e.g., books [3–9], papers [1, 2, 10–20], and the references therein). They are formulated as implicit criteria (simultaneously both sufficient and necessary) or as explicit sufficient criteria. In the paper we employ the following explicit criterion (assumptions are slightly modified to restrict the criterion to the considered case).
Theorem 3 [17]
If
for , then (1) has a non-oscillatory solution on .
In this paper we prove that every positive linear initial function given on the initial interval and satisfying certain restrictions, defines a positive solution of (1) on . Moreover, we show that this positive solution is a dominant solution and its limit is positive.
The paper is organized as follows. The main result (Theorem 5 below) in Section 3 is proved by the sensitive and flexible retract method. It is shortly described in Section 2. Its applicability is performed via Theorem 4, where an important role is played by a system of initial functions (see Definition 3). Proper choice of such a system of initial functions together with the application of Theorem 4 form the mainstay of the proof of Theorem 5.
2 Preliminaries - Ważewski’s retract principle
Let , where , , be the Banach space of the continuous mappings from the interval into equipped with the supremum norm
where is the maximum norm in . In the case and , we shall denote this space as , that is,
If , , and , then, for each , we define by , .
In this section we present Ważewski’s principle for a system of retarded functional differential equations
where  is a continuous quasi-bounded map which satisfies a local Lipschitz condition with respect to the second argument and is an open subset in
is a continuous quasi-bounded map which satisfies a local Lipschitz condition with respect to the second argument and is an open subset in  .
.
The principle below was for the first time introduced by Ważewski [21] for ordinary differential equations and later extended to retarded functional differential equations by Rybakowski [22].
We recall that the functional F is quasi-bounded if F is bounded on every set of the form , where , and L is a closed bounded subset of (see [[5], p.305]).
In accordance with [23], a function is said to be a solution of the system (4) on if there are  and such that
and such that  , and satisfies the system (4) for . For given , , we say is a solution of the system (4) through if there is an such that is a solution of the system (4) on and . In view of the above conditions, each element determines a unique solution of the system (4) through on its maximal interval of existence , which depends continuously on initial data [23]. A solution of the system (4) is said to be positive if on for each .
, and satisfies the system (4) for . For given , , we say is a solution of the system (4) through if there is an such that is a solution of the system (4) on and . In view of the above conditions, each element determines a unique solution of the system (4) through on its maximal interval of existence , which depends continuously on initial data [23]. A solution of the system (4) is said to be positive if on for each .
As usual, if a set  , then intω and ∂ω denote the interior and the boundary of ω, respectively.
, then intω and ∂ω denote the interior and the boundary of ω, respectively.
Definition 2 [22]
Let the continuously differentiable functions , and , , be defined on some open set  . The set
. The set
is called a regular polyfacial set with respect to the system (4), provided it is nonempty and the conditions (α) to (γ) below hold:
(α) For  such that for , we have .
such that for , we have .
(β) For all , all for which , and all for which and , , it follows that , where
(γ) For all , all for which , and all for which and , , it follows that , where
The elements in the sequel are assumed to be such that .
Definition 3 A system of initial functions with respect to the nonempty sets A and , where  , is defined as a continuous mapping such that (i) and (ii) below hold:
, is defined as a continuous mapping such that (i) and (ii) below hold:
-
(i)
If , then for .
-
(ii)
If , then for and .
Definition 4 [24]
If are subsets of a topological space and is a continuous mapping from ℬ onto such that for every , then π is said to be a retraction of ℬ onto . When a retraction of ℬ onto exists, is called a retract of ℬ.
The following lemma describes the main result of the paper [22].
Lemma 1 Let be a regular polyfacial set with respect to the system (4), and let W be defined as follows:
Let be a given set such that is a retract of W but not a retract of Z. Then, for each fixed system of initial functions , there is a point such that for the corresponding solution of (4) we have
for each .
Remark 1 When Lemma 1 is applied, a lot of technical details should be fulfilled. In order to simplify necessary verifications, it is useful, without loss of generality, to vary the first coordinate t in the definition of the set in (5) within a half-open interval open at the right. Then the set is not open, but tracing the proof of Lemma 1, it is easy to see that for such sets it remains valid. Such possibility is used below. Similar remark and explanation can be applied to sets of the type Ω, which serve as domains of definitions of functionals on the right-hand sides of equations considered.
Continuously differentiable functions , and , , mentioned in Definition 2 are often used in the form:
where ρ, δ are continuous vector functions
with for (the symbol ≪ here and below means for all ), continuously differentiable on . Hence, the shape of the regular polyfacial set from Definition 2 can be simplified to
In the sequel we employ the result from [[11], Theorem 1].
Theorem 4 Let there be a such that:
-
(i)
If , and for any , then
(6)
for any . (If , this condition is omitted.)
-
(ii)
If , and for any , then
for any . (If , this condition is omitted.)
Then, for each fixed system of initial functions , where the set Z is defined as
there is a point such that for the corresponding solution of (4) we have
for each , i.e., then there exists an uncountable set of solutions of (4) on such that each satisfies
The original Theorem 1 is in [11] proved using the retract technique combined with Razumikhin-type ideas known in the theory of stability of retarded functional differential equations.
3 Main result
In this section we consider scalar differential equation (1), where and is a continuous function satisfying
for and
The first condition (8), in accordance with Theorem 3, guarantees the existence of a positive solution on the interval . Then Theorems 1 and 2 are valid and equation (1) has two different positive solutions (dominant and subdominant) and on the interval . Condition (9), as will be seen from the explanation below, implies that the dominant solution has a positive limit for .
We set
where the constant C is well defined due to (9), and
Obviously, . Denote
Due to positivity of on , we have .
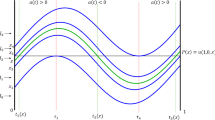
Let be a linear initial function defined on the interval as
where and . The following theorem gives sufficient conditions for the property
together with
where is a positive constant depending on the choice of the initial linear function .
Theorem 5 Let inequalities (8), (9) be valid, a constant and be defined by (10). Then the solution , where is defined by (10), and , is positive including the value , i.e.
and
Proof We will employ Theorem 4 with , i.e., the case (i) only. Set
where functions are defined as
We have
and since (i.e., ): on . Now, we define
and
We verify inequality (6). For , , and , , with , i.e., for
we have
Therefore, and (6) holds. Inequality (7) holds as well because for , and , , with , i.e., for
we have
Now, we will specify the system of initial functions mentioned in Theorem 4. For
( varies within the interval ), we define
i.e., every initial function is a linear function described by formula (10). Since , , for the system of functions , both assumptions (i), (ii) in Definition 3 are valid. Indeed, this property implies
if ,
and
Therefore, every segment
satisfies inequalities
if , . Consequently, (i) in Definition 3 holds.
If , then inequalities (12) hold if and (ii) is also valid.
Theorem 4 is also valid for this system. Consequently, there exists a point
such that
i.e.,
From inequalities (13) we conclude
because of (11). This solution is positive, i.e.,
due to positivity of .
Since the statement of the theorem holds for initial functions with , we can also conclude that due to linearity of equation (1), every constant positive initial function defines a positive solution.
If the solution does not coincide with the solution , i.e., if , then due to linearity, the sum or the difference of and a suitable positive solution generated by a positive constant initial function gives the solution . It is only necessary to show that the solution will be again positive. The condition for positivity is
or, after some computations,
The last inequality holds since
We finish the proof with the conclusion that the existence of positive limit is proved. □
Theorem 6 Let all assumptions of Theorem 5 be valid. Then the solution of equation (1) is a positive dominant solution.
Proof Every positive solution of equation (1) on is decreasing and therefore its limit exists and is finite. The value of the limit can be either positive or zero. In the case of solution of equation (1), we have
By Theorem 1 there must exist another positive solution of equation (1) on such that either
or
The first possibility (14) is impossible since in such a case there should exist a positive solution of equation (1) on with the property
which is obviously false. The possibility (15) remains. Then, by Definition 1, a solution of equation (1) is a dominant solution on . □
Remark 2 It is well known [[8], Theorem 3.3.1] that every continuous initial function φ, defined on the interval , such that , , , defines a positive solution on if the assumptions of Theorem 5 hold. But it is not known if such a solution is dominant or subdominant or if its limit for is positive or equals zero. The statements of Theorems 5 and 6 give new results in this direction since, for a class of linear initial positive functions (not fully covered by known results), positivity of generated solutions (including positivity of their limits) is established together with dominant character of their asymptotical behavior. It is a problem for future investigation to find values of positive limits of solutions considered in the paper (e.g., by methods used in [25–27]) or to enlarge the presented method to more general classes of equations and initial functions.
The topic considered in this paper is also connected with problems on the existence of bounded solutions. We refer, e.g., to recent papers [28–30] and to the references therein.
References
Diblík J: Behaviour of solutions of linear differential equations with delay. Arch. Math. 1998, 34(1):31–47.
Diblík J, Koksch N:Positive solutions of the equation in the critical case. J. Math. Anal. Appl. 2000, 250: 635–659. 10.1006/jmaa.2000.7008
Agarwal RP, Berezansky L, Braverman E, Domoshnitsky A: Nonoscillation Theory of Functional Differential Equations and Applications. Springer, Berlin; 2011.
Agarwal RP, Bohner M, Li W-T: Nonoscillation and Oscillation: Theory for Functional Differential Equations. Dekker, New York; 2004.
Driver RD: Ordinary and Delay Differential Equations. Springer, Berlin; 1977.
Erbe LH, Kong Q, Zhang BG: Oscillation Theory for Functional Differential Equations. Dekker, New York; 1994.
Gopalsamy K: Stability and Oscillations in Delay Differential Equations of Population Dynamics. Kluwer Academic, Dordrecht; 1992.
Györi I, Ladas G: Oscillation Theory of Delay Differential Equations. Clarendon Press, Oxford; 1991.
Kolmanovskii V, Myshkis A Mathematics and Its Application (Soviet Series) 85. In Applied Theory of Functional Differential Equations. Kluwer Academic, Dordrecht; 1992.
Čermák J: On a linear differential equation with a proportional delay. Math. Nachr. 2007, 280: 495–504. 10.1002/mana.200410498
Diblík J: A criterion for existence of positive solutions of systems of retarded functional differential equations. Nonlinear Anal. 1999, 38: 327–339. 10.1016/S0362-546X(98)00199-0
Diblík J, Kúdelčíková M:Two classes of asymptotically different positive solutions of the equation . Nonlinear Anal. 2009, 70: 3702–3714. 10.1016/j.na.2008.07.026
Diblík J, Kúdelčíková M: Two classes of positive solutions of first order functional differential equations of delayed type. Nonlinear Anal. 2012, 75: 4807–4820. 10.1016/j.na.2012.03.030
Diblík J, Růžičková M: Asymptotic behavior of solutions and positive solutions of differential delayed equations. Funct. Differ. Equ. 2007, 14(1):83–105.
Dorociaková B, Kubjatková M, Olach R: Existence of positive solutions of neutral differential equations. Abstr. Appl. Anal. 2012., 2012: Article ID 307968
Dorociaková B, Najmanová A, Olach R: Existence of nonoscillatory solutions of first-order neutral differential equations. Abstr. Appl. Anal. 2011., 2011: Article ID 346745
Koplatadze RG, Chanturia TA: On the oscillatory and monotonic solutions of first order differential equation with deviating arguments. Differ. Uravn. 1982, 18: 1463–1465. (In Russian)
Kozakiewicz E: Über das asymptotische Verhalten der nichtschwingenden Lösungen einer linearen Differentialgleichung mit nacheilendem Argument. Wiss. Z. Humboldt Univ. Berlin, Math. Nat. R. 1964, 13(4):577–589.
Kozakiewicz E: Zur Abschätzung des Abklingens der nichtschwingenden Lösungen einer linearen Differentialgleichung mit nacheilendem Argument. Wiss. Z. Humboldt Univ. Berlin, Math. Nat. R. 1966, 15(5):675–676.
Kozakiewicz E: Über die nichtschwingenden Lösungen einer linearen Differentialgleichung mit nacheilendem Argument. Math. Nachr. 1966, 32(1/2):107–113.
Ważewski T: Sur un principe topologique de l’examen de l’allure asymptotique des intégrales des équations différentielles ordinaires. Ann. Soc. Pol. Math. 1947, 20: 279–313. (Krakow 1948)
Rybakowski KP: Ważewski’s principle for retarded functional differential equations. J. Differ. Equ. 1980, 36: 117–138. 10.1016/0022-0396(80)90080-7
Hale JK, Lunel SMV: Introduction to Functional Differential Equations. Springer, Berlin; 1993.
Lakshmikantham V, Leela S: Differential and Integral Inequalities, Vol. I - Ordinary Differential Equations. Academic Press, New York; 1969.
Arino O, Pituk M: More on linear differential systems with small delays. J. Differ. Equ. 2001, 170: 381–407. 10.1006/jdeq.2000.3824
Bereketoğlu H, Huseynov A: Convergence of solutions of nonhomogeneous linear difference systems with delays. Acta Appl. Math. 2010, 110(1):259–269. 10.1007/s10440-008-9404-2
Györi I, Horváth L: Asymptotic constancy in linear difference equations: limit formulae and sharp conditions. Adv. Differ. Equ. 2010., 2010: Article ID 789302. doi:10.1155/2010/789302
Stević S: Existence of bounded solutions of some systems of nonlinear functional differential equations with complicated deviating argument. Appl. Math. Comput. 2012, 218: 9974–9979. 10.1016/j.amc.2012.03.085
Stević S: Bounded solutions of some systems of nonlinear functional differential equations with iterated deviating argument. Appl. Math. Comput. 2012, 218: 10429–10434. 10.1016/j.amc.2012.03.103
Stević S: Globally bounded solutions of a system of nonlinear functional differential equations with iterated deviating argument. Appl. Math. Comput. 2012, 219: 2180–2185. 10.1016/j.amc.2012.08.063
Acknowledgements
This research was supported by the Grant No 1/0090/09 of the Grant Agency of Slovak Republic (VEGA).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors have made the same contribution. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Diblík, J., Kúdelčíková, M. Initial functions defining dominant positive solutions of a linear differential equation with delay. Adv Differ Equ 2012, 213 (2012). https://doi.org/10.1186/1687-1847-2012-213
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2012-213