
Abstract
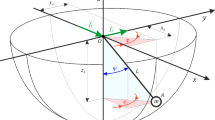
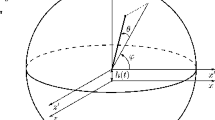
The dynamics of a spherical pendulum with a horizontally rotating support, exhibiting regimes of intriguing lagging behaviour in the presence of aerodynamic drag, is analysed in the present study. The dynamic equilibria of the pendulum are derived through both numerical and analytical means, with excellent experiment agreement across key system parameters. System attractors indicate the critical role played by drag in convergence towards the various equilibria. The stability of the various equilibria is also investigated. Interestingly, one of the folded states is found to be dynamically stabilized by the Coriolis force, with the resulting stability bound by a saddle-node bifurcation from below and a Hamiltonian Hopf bifurcation from above; multiple limit cycles are discovered past the Hopf point. Lastly, a theoretical analogy between the pendulum system and the triangular \(\text {L}_4\)/\(\text {L}_5\) Lagrange points in celestial mechanics is identified. The presented results are of relevance to crane systems and the mechanical modelling of cable or truss-supported structures.










Similar content being viewed by others
References
Hoang, N., Fujino, Y., Warnitchai, P.: Optimal tuned mass damper for seismic applications and practical design formulas. Eng. Struct. 30, 707 (2008)
Pinkaew, T., Fujino, Y.: Effectiveness of semi-active tuned mass dampers under harmonic excitation. Eng. Struct. 23, 850 (2001)
Sun, C., Nagarajaiah, S., Dick, A.J.: Experimental investigation of vibration attenuation using nonlinear tuned mass damper and pendulum tuned mass damper in parallel. Nonlinear Dyn. 78, 2699 (2014)
Haddow, A.G., Shaw, S.W.: Bifurcations in the mean angle of a horizontally shaken pendulum: analysis and experiment. Nonlinear Dyn. 34, 293 (2003)
Zhang, B.-L., Han, Q.-L., Zhang, X.-M.: Recent advances in vibration control of offshore platforms. Nonlinear Dyn. 89, 755 (2017)
Srinivasan, B., Huguenin, P., Bonvin, D.: Global stabilization of an inverted pendulum control strategy and experimental verification. Automatica 45, 265 (2009)
Citro, R., Torre, E.G.D., D’Alessio, L., Polkovnikov, A., Babadi, M., Oka, T., Demler, E.: Dynamical stability of a many-body Kapitza pendulum. Ann. Phys. 360, 694 (2015)
Xu, C., Yu, X.: Mathematical modeling of elastic inverted pendulum control system. J. Control Theory Appl. 2, 281 (2004)
Acheson, D.J., Mullin, T.: Upside-down pendulums. Nature 366, 215 (1993)
Srinivasan, M., Ruina, A.: Computer optimization of a minimal biped model discovers walking and running. Nature 439, 72 (2005)
Motoi, N., Motoi, N., Suzuki, T., Ohnishi, K.: A bipedal locomotion planning based on virtual linear inverted pendulum mode. IEEE Trans. Ind. Electron. 56, 54 (2009)
van Soest, A.J.K., Rozendaal, L.A.: The inverted pendulum model of bipedal standing cannot be stabilized through direct feedback of force and contractile element length and velocity at realistic series elastic element stiffness. Biol. Cybern. 99, 29 (2008)
Montazeri Moghadam, S., Sadeghi Talarposhti, M., Niaty, A., Towhidkhah, F., Jafari, S.: The simple chaotic model of passive dynamic walking. Nonlinear Dyn. 93, 1183 (2018)
Saranlý, U., Arslan, Ö., Ankaralý, M.M., Morgül, Ö.: Approximate analytic solutions to non-symmetric stance trajectories of the passive spring-loaded inverted pendulum with damping. Nonlinear Dyn. 62, 729 (2010)
Shinbrot, T., Grebogi, C., Wisdom, J., Yorke, J.A.: Chaos in a double pendulum. Am. J. Phys. 60, 491 (1992)
Christini, D.J., Collins, J.J., Linsay, P.S.: Experimental control of high-dimensional chaos: the driven double pendulum. Phys. Rev. E 54, 4824 (1996)
Braiman, Y., Lindner, J.F., Ditto, W.L.: Taming spatiotemporal chaos with disorder. Nature 378, 465 (1995)
Matsuzaki, Y., Furuta, S.: Bifurcation analysis of the motion of an asymmetric double pendulum subjected to a follower force: codimension three problem. Nonlinear Dyn. 2, 199 (1991)
Mann, B.P., Koplow, M.A.: Symmetry breaking bifurcations of a parametrically excited pendulum. Nonlinear Dyn. 46, 427 (2006)
Schmitt, J.M., Bayly, P.V.: Bifurcations in the mean angle of a horizontally shaken pendulum: analysis and experiment. Nonlinear Dyn. 15, 1 (1998)
Luo, A.C.J.: Resonance and stochastic layer in a parametrically excited pendulum. Nonlinear Dyn. 25, 355 (2001)
Soliman, M.S.: Global transient dynamics of nonlinear parametrically excited systems. Nonlinear Dyn. 6, 317 (1994)
Abdel-Rahman, E.M., Nayfeh, A.H., Masoud, Z.N.: Dynamics and control of cranes: a review. Modal Anal. 9, 863 (2003)
Ju, F., Choo, Y.S.: Dynamic analysis of tower cranes. J. Eng. Mech. 131, 88 (2005)
Ghigliazza, R., Holmes, P.: On the dynamics of cranes, or spherical pendula with moving supports. Int. J. Non-Linear Mech. 37, 1211 (2002)
Masoud, Z.N., Nayfeh, A.H., Al-Mousa, A.: Delayed position-feedback controller for the reduction of payload pendulations of rotary cranes. Modal Anal. 9, 257 (2003)
Uchiyama, N., Ouyang, H., Sano, S.: Simple rotary crane dynamics modeling and open-loop control for residual load sway suppression by only horizontal boom motion. Mechatronics 23, 1223 (2013)
Terashima, K., Shen, Y., Yano, K.: Modeling and optimal control of a rotary crane using the straight transfer transformation method. Control Eng. Pract. 15, 1179 (2007)
Shui-Lian, C., Heng-Rui, W., Yu-Hang, Y., DaWei, D., Zhang, Y.-X.: Lag pendulum model and its application in wind resistance stability of the structure. DEStech Trans. Soc. Sci. Educ. Hum. Sci. (2017). https://doi.org/10.12783/dtssehs/icesd2017/11642
Brucker, E., Gurfil, P.: Analysis of gravity-gradient-perturbed rotational dynamics at the collinear lagrange points. J. Astronaut. Sci. 55, 271 (2007)
Selaru, D., Cucu-Dumitrescu, C.: Infinitesimal orbits around lagrange points in the elliptic, restricted three-body problem. Celest. Mech. Dyn. Astron. 61, 333 (1995)
Schnittman, J.D.: The lagrange equilibrium points L 4 and L 5 in black hole binary system. Astrophys. J. 724, 39 (2010)
Murray, N., Holman, M.: The role of chaotic resonances in the solar system. Nature 410, 773 (2001)
Sicardy, B.: Stability of the triangular Lagrange points beyond Gascheau’s value. Celest. Mech. Dyn. Astron. 107, 145 (2010)
Gascheau, G.: Examen d’une classe équations differentielles et applications un cas particulier du problme des trois corps. C. R. Acad. Sci. 16, 393 (1843)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Stability threshold for \(\theta _{e_1}\)
A derivation similar to Ghigliazza and Holmes [25] is followed. At the saddle-node bifurcation, \(q\equiv {b/\ell }=-\sin ^3{\theta }\). The stability threshold for \(\theta _{e_1}\) occurs when the eigenvalues in Eq. (8) are degenerate, disregarding sign; this occurs when \(p\equiv {\alpha -\sqrt{\beta }}=0\), with solution \(q=(4/5)^{3/2}\equiv \xi \). Recall that \(\lim _{\Omega \rightarrow \infty } \theta _{e_1} = -\arcsin {b/\ell }=\zeta \), and therefore \((b/\ell )^{1/3}\le {-\sin {\theta }}<b/\ell \). When \(q>\xi \), \(p<0\,\forall \, \theta \in \left( -\arcsin {b/\ell },-\arcsin {(b/\ell )^{1/3}}\right) \), as can be deduced by noting that \(p'(\theta )<0\) within the same domain. This yields complex eigenvalues and indicates instability. On the other hand, \(q<\xi \) yields imaginary eigenvalues and indicates stability.

Potential landscapes for \(b=15\hbox { cm}\), \(\ell =47\hbox { cm}\), \(g=9.78\hbox { m/s}^{2}\), \(\Omega _{\text {SN}}=7.31\hbox { rad/s}\). a\(\Omega =5\hbox { rad/s}<\Omega _{\text {SN}}\)b\(\Omega =15\hbox { rad/s}>\Omega _{\text {SN}}\)
Appendix B: Potential stability analysis
The stability of the various dynamic equilibria can alternatively be analysed by examining the dimensionless potential of the system, given by
where A and B are defined in Eq. (3), and negligible drag has been assumed. The potential landscapes of the system are shown in Fig. 11, plotted for \(\Omega <\Omega _{\text {SN}}\) and \(\Omega >\Omega _{\text {SN}}\), respectively. The three dynamic equilibria are, if present, aligned on the \(\phi =0\) plane. When \(\Omega <\Omega _{\text {SN}}\), it is clear that there exists no equilibria for \(\theta \in (-\pi /2,0)\). On the other hand, when \(\Omega >\Omega _{\text {SN}}\), we observe the formation of the two discrete equilibria \(e_1\) and \(e_2\). In particular, note that \(e_0\) is always within a potential well, consistent with its apparent stability observed in experiments. Similarly, \(e_2\) is located on a potential saddle, corroborating its instability in experiments. However, \(e_1\) is located atop a potential hill, contradictory to its stability in experiments. This suggests that the stability of \(e_1\) cannot be attributed to conservative forces.
Appendix C: Drag characterization
Figure 12 illustrates the stationary (\(\Omega =0\)) decay envelope of the system perturbed from equilibrium in the x–z plane. Numerical nonlinear regression of Eq. (5) against the experimentally measured decay envelope allows the determination of appropriate values for the drag coefficients \(\mu _1\) and \(\mu _2\), which are then consistently used throughout this paper.

Stationary decay envelope for \(m=19\hbox { g}\), \(\ell =4\hbox { cm}\), \(\mu _1=\kappa \cdot 1.52\hbox { mg/s}\) and \(\mu _2=\kappa \cdot 4.56\hbox { mg/m}\), where \(\kappa =200\). Experiment error bars are too small to be visible

Potential landscape of a two-body celestial system in the rotating frame. The \(\text {L}_1\)–\(\text {L}_3\) Lagrange points are located on potential saddles, while the \(\text {L}_4\)/\(\text {L}_5\) Lagrange points are located on Coriolis-stabilized hills
Appendix D: \(\text {L}_4\)/\(\text {L}_5\) Lagrange points
Figure 13 illustrates the potential landscape due to gravitational and centrifugal forces in the rotating frame of two masses orbiting about their barycenter; the \(\text {L}_1\)–\(\text {L}_5\) Lagrange points are the five equilibrium positions.
A comparison can be made between the linearized equations of motion of the lagging pendulum, as expressed in Eq. (7), and that of objects in the neighbourhood of the \(\text {L}_4\)/\(\text {L}_5\) Lagrange points:
where the terms \(\mathbf {J}_{24}\) and \(\mathbf {J}_{42}\) in Eq. (7), as well as the \(\pm {\,}{2\Omega }\) terms in Eq. (D1), are the Coriolis terms. It is immediately apparent that the two systems share fundamental similarities. Indeed, dynamics in the vicinity of the \(\text {L}_4\)/\(\text {L}_5\) Lagrange points are Coriolis-stabilized and also undergo a Hamiltonian Hopf bifurcation when the mass ratio parameter exceeds \(m_2/m_1>2/(25+3\sqrt{69})\) [34, 35].
Rights and permissions
About this article

Cite this article
Lendermann, M., Koh, J.M., Tan, J.S.Q. et al. Bifurcations and dynamical analysis of Coriolis-stabilized spherical lagging pendula. Nonlinear Dyn 96, 921–931 (2019). https://doi.org/10.1007/s11071-019-04830-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-019-04830-z