
Abstract
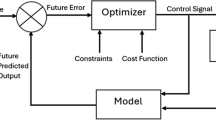
This paper proposes a non-smooth predictive control approach for mechanical transmission systems described by dynamic models with preceded backlash-like hysteresis. In this type of system, the work platform is driven by a DC motor through a gearbox. The work platform is represented by a linear dynamic sub-model connected in series with a backlash-like hysteresis inherent in gearbox. Here, backlash-like hysteresis is modeled as a non-smooth function with multi-valued mapping. In this case, the conventional model predictive control for such system cannot be implemented directly since the gradients of the control objective function with respect to control variables do not exist at non-smooth points. In order to solve this problem, a non-smooth receding horizon strategy is proposed. Moreover, the stability of predictive control of such non-smooth dynamic systems is analyzed. Finally, a numerical example and a simulation study on a mechanical transmission system are presented for validating the proposed method.
















Similar content being viewed by others

References
Nordin, M., Gutman, P.: Controlling mechanical systems with backlash-like hysteresis—a survey. Automatica 38, 1633–1649 (2002)
Tao, C.W.: Fuzzy control for linear plants with uncertain output backlash-like hysteresis, IEEE Trans. Syst. Man Cybern. Part B: Cybern. 32(3), 373–380 (2002)
Zhou, J., Zhang, C., Wen, C.: Robust adaptive output control of uncertain nonlinear plants with unknown backlash-like hysteresis nonlinearity. IEEE Trans. Autom. Control 52(3), 503–509 (2007)
Baruch, I.S., Beltran, R.L., Nenkova, B.: A mechanical system backlash-like hysteresis compensation by means of a recurrent neural multi-model. In: 2nd IEEE International Conference on Intelligent Systems, pp. 514–519 (2004)
Dong, R., Tan, Y.: Internal model control for dynamic systems with preceded backlash-like hysteresis. J. Dyn. Syst. Measure. Control 131, 024504 (2009)
Zhao, Y., Liu, G., Rees, D.: Networked predictive control systems based on the Hammerstein model. IEEE Trans. Circuits Syst. II: Express 55(5), 469–473 (2008)
Zhao, Y., Liu, G., Rees, D.: A predictive control-based approach to networked Hammerstein systems: design and stability analysis. IEEE Trans. Syst. Man. Cybern. Part B: Cybern. 38(3), 700–708 (2008)
Ding, B., Huang, B.: Output feedback model predictive control for nonlinear systems represented by Hammerstein-Wiener model. IET Control Theory Appl. 1(5), 1302–1310 (2007)
Oblak, S., Škrjanc, I.: Continuous-time Wiener-model predictive control of a pH process. In: Proceedings of the ITI 2007 29th International Conference on Information Technology Interfaces, Cavtat, pp. 771-776 (2007)
Harnischmacher, G., Marquardt, W.: Nonlinear model predictive control of multivariable processes using block-structured models. Control Eng. Pract. 15(10), 1238–1256 (2007)
Zabiri, H., Samyudia, Y.: A hybrid formulation and design of model predictive control for systems under actuator saturation and backlash-like hysteresis. J. Process Control 16, 693–709 (2006)
Lagerberg, A., Egardt, B.: Model predictive control of automotive powertrains with backlash-like hysteresis. In: Proceedings of 16th IFAC World Congress, Prague, 1887 (2005)
Rostalski, P., Besselmann, T., Baric, M., Van Belzen, F., Morari, M.: A hybrid approach to modeling, control and state estimation of mechanical systems with backlash-like hysteresis. Int. J. Control 80(11), 1729–1740 (2007)
Mäkelä, M.M., Miettinen, M., Lukšan, L., Vlcek, J.: Comparing nonsmooth nonconvex bundle methods in solving hemivariational inequalities. J. Global Optim. 14, 117–135 (1999)
Miller, S.A.: An Inexact Bundle Method for Solving Large Structured Linear Matrix Inequality, Doctor of Philosophy in Electrical and Computer Engineering. University of California, Santa Barbara (2001)
Cambini, A., Martein, L.: Generalized Convexity and Optimization Theory and Applications. Lecture Notes in Economics and Mathematical Systems, vol. 616. Springer-Verlag, Berlin, Heidelberg (2009)
Mäkelä, M.M.: Survey of bundle methods for nonsmooth optimization. Optim. Methods Softw. 17(1), 1–29 (2002)
Dong, R., Tan, Y., Chen, H.: Recursive identification for dynamic systems with backlash-like hysteresis. Asian J. Control 12(1), 26–38 (2010)
Clarke, D., Mohtadi, C., Tuffs, P.: Generalized predictive control-Part I. The basic algorithm. Automatica 23(2), 137–148 (1987)
Xu, L., Feng, C.: Reviews of generalized predictive control. Control Des. 7(4), 241–246 (1992)
Clarke, D.W., Mohtadi, C., Tuffs, P.S.: Generalized predictive control part II. Extensions and interpretations. Automatica 23(2), 149–160 (1987)
Dong, R., Tan, Y., Janschek, K.: Non-smooth predictive control for Wiener systems with backlash-like hysteresis. IEEE/ASME Trans. Mech. 21(1), 17–28 (2016)
Acknowledgments
This research is partially supported by the Research Projects of Science and Technology Commission of Shanghai (Grant Nos. 14140711200 and 14ZR1430300), the Advanced Research Project of Shanghai Normal University (Grant No. DYL201604) and the National Science Foundation of China (NSFC Grant Nos.: 61571302, 61371145,61203108 and 61171088). The first author would also like to give her acknowledgment to the support of K.C. Wong Education Foundation (KCWEF) and German Academic Exchange Service (DAAD) as well as Dresden Fellowship Program of TUD.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
In the following, the proof of Theorem 3 will be presented.
For the convenience of analysis, it is supposed that
Based on formulae (1), (2), (12) and (22), \(\mathbf{U}_1 (k)\) can be represented by
It is known that, in receding horizon control strategy, only the first element of control vector, i.e., u(k) is implemented to the controlled system, the other control sequence, i.e., \(u(k+1),\ldots ,\) and \(u(k+N_u -1)\) are not implemented. Therefore, from (44), it is obtained that
Based on the definition of \(\mathbf{F}_0 ,\mathbf{X}(k),{\tilde{{\varvec{\upvarphi }}}}(k),\mathbf{F}_\mathbf{1}\) and \(\Delta \mathbf{X}(k-1)\), it leads to:
and
By substituting (46) and (47) into (45), it yields
It is known that
where \(y_{m} (k)\) is the output of system model, e(k) is the model error which is defined as \(e(k)=y(k)-y_{m} (k)\).
For \(\hat{{M}}_1 (z^{-1})\) is the model of linear sub-system, it leads to:
Then, substituting Eqs. (50) into (49) results in
Afterward, substituting Eqs. (51) into (48) yields
In the following, the proof will be implemented based on two cases, i.e.,
Case 1 if the system operates in linear zones, based on Eqs. (2), (25) and (43), Eq. (52) can be written as:
namely,
where
\(M_2 (z^{-1})=\mathbf{d}_{21} \mathbf{G}\) and \(D_{r} (z^{-1})y_{r} (k+L)=\mathbf{d}_{21} \mathbf{R}(k+1)\). Based on (43), it leads to
By considering Remark 1, (24)–(28) and (49)–(51), (54) can be written as:
Then, based on (24)–(29), (49)–(51) and (54), it leads to
In terms of the small gain Theorem, note that the relation between (29) and (30). Then, it is known that the control system is stable if \(G_{c} (z^{-1})\) and \(P(z^{-1})\) are selected to satisfy
Case 2 The control system works in memory zones.
In this case, it is known that:
If (58) is satisfied to enable the control system to be stable in Case 1, the control system is also stable when the system works in memory zones.
Thus, the corresponding closed-loop control system can be stabilized if \(\mathrm{sup}|M_2 (z^{-1})||\eta (z^{-1})|<\mathrm{inf}|P(z^{-1})|\).
End of proof. \(\square \)
Appendix 2
-
Step 1:
Given \(\varepsilon >0\);
-
Step 2:
Calculate the Clarke sub-gradient of x(k) with respect to u(k), i.e., estimate \(\tilde{h}_1 (k)\) in (22);
-
Step 3:
Calculate the Clarke sub-gradient of J(k) with respect to u(k), i.e., \(\partial J_{k}^{j_2 } (u(k))\) where \(j_2 =1,2,\cdots ,t\), and t is a bounded natural number;
-
Step 4:
Calculate \(u_{j_2 } (k)\) based on Eq.(23);
-
Step 5:
If \(J(k)\le t_1 \varepsilon ,t_1 \in (0,1)\), and \(u(k)=u_{j_2 } (k)\), it goes to step 7; otherwise, go to step 6;
-
Step 6:
Let \(u(k)=u_{j_3} (k)\), where \(u_{j_3}(k)\) enables J(k) to reach its minima;
-
Step 7:
Let \(k=k\) +1, and go to step 2.
Appendix 3
In this appendix, the procedure to deduce (22) is shown as follows.
Substituting (15) into (12) leads to:
Thus, the corresponding Clarke sub-differential of J(k) with respect to u(k) can be obtained by:
Based on Theorem 1 and (61), it leads to:
Namely, (22) is obtained
Rights and permissions
About this article

Cite this article
Dong, R., Tan, Y., Janschek, K. et al. Non-smooth predictive control for mechanical transmission systems with backlash-like hysteresis. Nonlinear Dyn 85, 2277–2295 (2016). https://doi.org/10.1007/s11071-016-2828-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-2828-8