
Abstract
Several techniques have been proposed for measuring speeds of meteoroids observed using radars. A recent technique involves the use of Fresnel transforms to accurately determine the speed of a meteoroid producing the trail. We follow a numerical modeling approach to analyze this technique in detail. Our studies indicate that high sensitivity to background noise levels might be a possible shortcoming of the Fresnel transform method. A matched filtering approach is presented as an alternative to alleviate this sensitivity to the noise problem. Performance of the two techniques is compared using numerical modeling and data from a 30 MHz radar.
Similar content being viewed by others

1 Introduction
The need to accurately estimate astronomical parameters like meteoroid orbits as well as to get a better understanding of atmospheric parameters like ionization efficiency and initial radius of meteoroid plasma has motivated continued research into meteor speed estimation techniques. Observational methods like visual, photographic, spectral, infrasonic and radar studies have been employed to study the properties of meteors with varying degrees of success. In spite of higher accuracies offered by photographic techniques, lately radar techniques have found much favor particularly due to their high sensitivity, day time observational capabilities and access to smaller meteoroids. Properties like composition, ablation rates, ionization diffusion and velocities are of particular scientific value. Here we will be concerned with meteor scalar speed determination by observing the diffraction echo from meteor trail (e.g., McKinley 1961). Determination of vector velocity based on the meteor trail requires a complex multi-site radar system, although interferometric techniques allow single-site velocity determination using the head echo (Chau and Woodman 2004). However, a measure of the scalar speed is sufficient for various studies like ablation rate and ionization efficiency.
In this work we consider a class of meteor echoes referred to as “diffraction echoes” in McKinley (1961). A defining feature of such meteors is that the evolving trail at its closest point is perpendicular to the radar pointing direction. Several speed estimating techniques have been explored over the years for diffraction echoes from meteor trails. One of the first techniques for speed determination was the “range-time” method developed by Hey et al. (1947)) that relied on fitting hyperbolas to the range-time records of moving echoes presumed to be associated with the actual meteor head. Almost all the other velocity estimating techniques exploit the fact that echoes from trails produced by transversely traveling particle trace out the standard Fresnel diffraction pattern which can be described in terms of the Cornu spiral (Ellyett and Davies 1948). Depending on whether the amplitude before or after the geometrically orthogonal point on the trail (called the t 0 point) is used there are two possibilities: the “pre-t 0 amplitude” method (Baggaley and Grant 1997) and the “post-t 0 amplitude” method (Badger 2002; Baggaley and Grant 1994; McKinley 1961). Further, the phase response before the t 0 point can be observed leading to the “pre-t 0 phase” method (Cervera et al. 1997). While insensitivity to ionization diffusion makes the “pre-t 0 amplitude” technique attractive (Ceplecha et al. 1998), it suffers from high uncertainty (Baggaley and Grant 2005). Although the “post-t 0 amplitude” is more accurate it suffers from limited applicability due to frequent non-availability of several successive oscillations in the return signal due to various reasons (Baggaley and Grant 2005). The “pre-t 0 phase” technique is both relatively accurate and widely applicable (Baggaley and Grant 2005). However, pre-processing steps like removal of effect of wind drift and phase unwrapping are usually necessary. A further development involves utilizing the coherence structure in both the pre and post-t 0 portions of the response and applying a Fourier transform approach (Hocking 2000).
A fairly recent technique in the field of speed determination from radar meteor trail echoes has been the development of the Fresnel transform method (Elford 2004). In addition to providing accurate estimates of meteor event speeds the Fresnel transform technique also reveals other echo parameters like deceleration by use of a modified form of the technique and fragmentation by looking at the unwrapped phase of the transform. This technique has been successfully applied to data from the Buckland Park Stratosphere/Troposphere (BPST) radar (Campbell and Elford 2006; Elford 2004), the Advanced Meteor Orbit Radar (AMOR) (Baggaley and Grant 2005), and more recently from several other meteor radar facilities (Holdsworth et al. 2007). An enhancement to this technique involving the gradient of the transform (Baggaley and Grant 2005) allows automated speed estimation and obviates the need for visual inspection of the transforms. A computationally efficient version of the Fresnel transform technique that replaces the convolution operation in the time domain by multiplication in the frequency domain has been recently developed in Holdsworth et al. (2007). Extension of the speed estimation technique using Fresnel transform to the case of long IPP is another significant contribution of that paper.
In this paper, we analyze the signal processing aspects of the Fresnel transform technique. We highlight the possible susceptibility of this technique to background noise and propose a basic matched filtering technique that performs better in poor signal to noise conditions. A numerical model of the radar meteor trail echo is used to investigate performance of the two methods. Finally these techniques are applied to data from a 30 MHz radar operating at St. Croix to verify their performance. Section 2 deals with modeling of a meteor trail observed in the transverse mode and introduces the Fresnel integral equation. The Fresnel transform technique for speed estimation from classical radar meteor trail echoes is introduced in Sect. 3. A signal processing motivated analysis of the Fresnel transform technique is presented in Sect. 4 where we also propose a new matched filtering approach for speed determination. Application of the two techniques to data from St. Croix radar is the subject of Sect. 5. Finally highlights of the findings of this study are presented in Sect. 6.
2 Meteor Trail Modeling
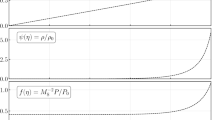
The first step in developing a meteor trail model is to assume that in the wake of the meteor a stationary column of free electrons is created, with a diameter that is small in comparison with the wavelength. The net scattering from an extended ensemble of electrons can be found by taking into account the net phase path between each electron and the radar. Figure 1 shows the geometry of the meteor’s path through the atmosphere relative to the radar station. If we represent the transmitter power by P T (in watts), the transmitter system loss coefficient by L ( = 1.0 for no loss) and the antenna gain by G, then the net received power at the radar from the underdense (optically thin) meteor trail is (McKinley 1961)
where we assume that each differential scattering element, N i , scatters coherently (in-phase) and is thus much smaller than a wavelength in characteristic size, r e is the classical electron radius and R i is the distance of the element from the radar antenna. The wavenumbers are k 0 and k s where the scattered wavelength corresponds to the Doppler-shifted frequency received from the meteor. While the trail is being formed, the value within the modulus increases steadily as the meteoroid approaches the t 0 point (orthogonal point) and then oscillates (Fig. 2a). Numerical modeling of the meteor trail echo allows analysis of the effect of various parameters on the meteor return signal and in particular we will study the effect of inter pulse period (IPP) on the meteor return signal. In Sect. 3 we will study the effect of long IPP on the Fresnel transform method. Figure 2a (Curve A) shows the return echo power and phase for a fairly short IPP—relative to the model meteor speed. Curves B–D show the effect of increasing degree of diffusion of the ionization on the return signal (effects of the earth’s magnetic field are ignored). Figure 2b shows the effect of using a long IPP while sampling the radio meteor signal, in the absence of ionization diffusion. Clearly, the Fresnel oscillations after the t 0 point are hardly discernable and the unwrapped phase is also distorted although to a much lesser extent. However, this leads to significant errors in speed determination by pre-t 0 phase and pre-t 0/post-t 0 amplitude methods (Badger 2002; Baggaley and Grant 2005; Cervera et al. 1997).

The geometry of the meteor path through the atmosphere relative to the radar station

Returned echo power (upper) and unwrapped phase (lower) using the model, meteoroid speed = 60 km/s. (a) IPP = 0.2 ms. Curve A shows no diffusion, and curves B–D exhibit effects of increasingly severe ionization diffusion; (b) IPP = 4 ms. Effects of under-sampling are evident in both amplitude and phase plots
3 Fresnel Transform Method
A fairly recent development in the field of radio meteor speed determination has been the Fresnel transform technique (Elford 2001, 2004). This technique involves evaluating the scattering function of the trail measured with respect to the position of the head (leading edge of trail) as origin by performing a Fresnel transform of the complex signal E(t) recorded at the radar station. Mathematically (Elford 2001, 2004), the exact form of the Fresnel transform and approximate representation as a convolution are,
where A(y) is the scattering function of the trail considering the head as origin, K is a constant, E is the complex valued data from the radar, k is the wavenumber, v is the trial speed and y is the distance along the path back from the meteor head. Figure 3 presents results of this technique. Fresnel transforms are calculated for different assumed speeds, and the trial speed that gives the steepest slope at the t 0 point is chosen as the best estimate of the speed of the meteoroid. From Figure 3a it is evident that fairly accurate speed estimation is possible by this method but in some cases speed resolution may be limited due to the inability of the eye to distinguish between slopes for closely spaced trial speeds. Further, we study the effect of IPP on the effectiveness of this technique. Clearly, speed estimation is possible when the IPP is short enough but when the trail echo is under-sampled (Fig. 3b), correct speed estimation is not possible by this method.

Fresnel transform of meteor trail model, model meteoroid speed = 60 km/s. (a) IPP = 0.2 ms, correct speed estimate is obtained; (b) IPP = 4 ms, reliable speed estimate is not possible due to under-sampling
An enhancement to the original Fresnel transform technique has been proposed (Baggaley and Grant 2005) that estimates the meteoroid speed by evaluating the gradient of the Fresnel transform around the t 0 point. As a result, instead of visually determining the maximum (negative) slope of the transform, the trial speed producing the gradient with the maximum (negative) peak value at the t 0 point is the estimated meteoroid speed. This is illustrated in Fig. 4 where a synthetic meteor radar signal is subjected to the modified Fresnel transform technique and the gradients of the entire records are plotted for eight different trial speeds in the eight panels. It is immediately evident that the (negative) gradient is highest for the correct trial speed (60 km/s in this case). However, it must be noted that the presence of background noise and other non-ideal characteristics in a real radar meteor record will lead to a less prominent peak in the gradient of the transform and in many cases even lead to erroneous results. The effect of background noise is investigated further in the following section. Figure 5 highlights the sensitivity aspect of this technique by plotting the peak gradient values for various trial speeds for a 60 km/s synthetic radar meteor trail. Clearly, 100 m/s resolution is possible for this ideal case.

Negative derivative of the Fresnel transform for different trial speeds. Highest peak is achieved when trial speed equals model meteor speed

Peak values for a range of trial speeds: modified Fresnel transform used. Trial speeds spaced 100 m/s apart
4 Fresnel Transform: A Signal Processing Interpretation and Matched Filtering
The Fresnel transform technique as presented in (Elford 2004) and then modified in (Baggaley and Grant 2005), involves the convolution of the meteor return signal with a waveform and thereafter examining the gradient of the resulting transform either visually or numerically. Here we examine this technique from a signal processing perspective. An insight into the workings of this technique can be gained by recognizing that the integral in (2) is basically a convolution (e.g., (3)) of the meteor return signal with the derivative of a “clean” version of the return signal for different trial speeds. Figure 6 shows the real part of the Fresnel transform “weighting function”, which is the exponent term within the integral in (2) for different offsets. It can be verified that this is indeed the same as the derivative of the Fresnel integral (1).

The Fresnel transform “weighting function”, real part: successive time shifts
Trying to match a signal to its derivative has some implications. Foremost is the concern about noise enhancement. The high-pass-filter-like characteristics of the derivative operator presents a possible complication that we study further in the later part of this section. An alternative to this technique is the matched filter that does not involve evaluating any derivatives. An approach similar to the one developed for the speed determination of meteoroids using head echoes observed using UHF radars is proposed next (Mathews et al. 2003; Wen et al. 2004). This technique involves setting up a bank of complex valued filters, each matched to a different trial speed and the speed corresponding to the filter producing the highest output is declared as the best estimate of the speed of the meteoroid. Since this technique does not involve evaluating the derivative of the meteor return signal, it is expected that it will be less sensitive to the background high frequency noise. An illustration of typical filter bank functions set up for a 30 MHz radar is presented in Fig. 7.

A typical model meteor trail echo and filter bank functions: real part in top panel and imaginary part in lower panel. Model meteoroid speed is set to 60 km/s (solid solid) and filter bank function speeds are set to 54 km/s (dashed curve), 60 km/s (dash-dot curve) and 66 km/s (dotted curve). Filter bank function for 60 km/s coincides with that of actual signal. In this model the value of diffusion constant used is 4 m2/s
We show in Fig. 8 the cross-covariance characteristics of the modified Fresnel transform method and the matched filter method. In the absence of background noise the more peaked nature of the Fresnel transform method as compared to the matched filter characteristics is clearly evident. Next, we add background noise to the model meteor return signal and compare both these techniques. The accuracy of these speed estimation techniques depends on two factors: the signal-to-noise ratio (SNR) Footnote 1 of the data as well as the speed of the model meteor. Figure 9 shows the bias in speed estimation by both techniques for different SNRs and model meteor speeds. Clearly, the greatest bias in speed estimation occurs in the region of low SNR and high model speed for either technique. The Fresnel transform technique over-estimates the model speed at low SNRs and this situation gets worse at higher actual model speeds. The reason for the over-estimation of speed by the Fresnel transform technique can be understood by considering the frequency spectrum of the model meteor data and the Fresnel transform “weighting function” as shown in Fig. 10. Speed estimation by this technique involves multiplying the data frequency response with the “weighting function” frequency response for different trial speeds. A trial speed that is higher than the actual speed, corresponding to a wider “weighting function” frequency response, will lead to inclusion of greater amount of noise thereby producing a higher peak and a higher speed estimate.

Cross-covariance characteristics of the two techniques. Ionization diffusion absent. Model meteoroid speed = 60 km/s. (a) Fresnel transform; (b) Matched filter

Bias in estimated speed due to additive white Gaussian noise (AWGN) using the two techniques. Inter-pulse-period (IPP) = 0.5 ms, trial speed spaced 100 m/s apart, results averaged over 500 trials. The figures on the contour plot refer to the quantity (v(estimate)-v(model)) in units of m/s. (a) Fresnel transform; (b) Matched filter

Typical frequency spectrum of the model meteor data and Fresnel transform “weighting function”
Another aspect of the Fresnel transform technique that deserves closer inspection is the effect of pulse rate. As pointed out in Sect. 3 and also mentioned in the context of actual radar data in Sect. 5, using an extended IPP may lead to a situation where no reliable speed estimation is possible using the Fresnel transform technique. The minimum pulse frequency required for reliable speed estimation using Fresnel transform technique can be derived in a straightforward manner from the expression for the maximum frequency of the weighting function first presented in Holdsworth et al. (2007) and is given by
where v is the meteoroid speed, t max is the maximum time duration of the meteor event before or after the t 0 point, λ is the radar wavelength and R 0 is the distance to the orthogonal point on the trail. The meteor data involves a signal of rising frequency away from the t 0 point. This gives rise to the need to adequately sample the highest frequency content thereby producing the minimum pulse frequency requirement (4). The minimum pulse frequency requirement for varying parameters is shown in Fig. 11. Results from applying the Fresnel transform and the matched filter techniques to data from a very high frequency (VHF) radar presented in the following section demonstrate that whereas the matched filter technique yields good estimates of the speeds for relatively long IPP (4 ms), the Fresnel transform technique requires an additional step of interpolation to produce reliable estimates of meteor speeds. Before leaving this topic we would like to mention that based on the fact that the choice of system parameters for radar systems is a result of trade-offs between conflicting requirements we hope that the guideline provided here for the choice of minimum pulse frequency will help in the design of future radar systems.

Minimum pulse frequency requirements for a 30 MHz radar for different ranges and meteoroid speeds for speed estimation using the Fresnel transform technique. The maximum time duration of the meteor signal considered is 0.1 s from t 0 point
Finally, we look at the effect of wrong estimation of the range R 0 on the speed estimation techniques. The value of R 0 in (2) and for the matched filter is estimated from the time of travel for the radar signal and consequently, one might expect an error associated with it. Range resolution of most radars is 1–2 km resulting in range error of about 0.5–1 km. Our studies indicate that the effect of wrong range estimate is similar on both techniques, resulting in speed estimate error that is half the percentage value of the range estimate error (e.g., range estimate error of 2% will lead to a speed estimate error of 1%) for SNR values greater than about 16 dB. Predicting the effect of wrong range estimates on speed estimation proved inconclusive at low SNRs. As a concluding remark in this section we would like to highlight the fact that although the problem of meteor speed estimation for fragmented meteoroids has been addressed for the Fresnel transform technique (Elford 2004), our studies with the matched filter did not consider that issue. We believe that the need to pre-suppose the form of the echo in the matched filtering case makes it unsuitable when meteoroid fragmentation occurs and this may prove to be a major shortcoming of this technique.
5 St. Croix Data
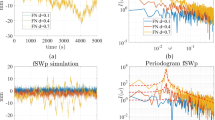
Fresnel transform and matched filtering techniques were applied to data obtained from a portable 30 MHz radar operating on the island of St. Croix during June 2002. Operational parameters include inter-pulse period (IPP) of 4 ms and a 28-baud biphase code. Further details of the radar are available in Hysell et al. (2002, 2004). The two speed-determination techniques were applied to two events to compare their relative performances. While matched filtering yielded speed estimates with accuracy of 1 km/s when applied to the original data, no reliable speed estimate was possible using the Fresnel transform technique due to the extended IPP. Speed determination using the Fresnel transform is possible using interpolation with an interpolation factor of 8. Interpolation using cubic Hermite polynomials was used in this case. These results are presented in Fig. 12. An exact match is obtained for speeds determined by both techniques for these two events.

Fresnel transform and matched filtering applied to two events from St. Croix 30 MHz radar, (left) 06/18/2002, 21:46:18, range = 296 km; (right) 06/18/2002, 21:48:46, range = 215 km. Trial speed resolution used for both techniques is 1 km/s. (a, b) Amplitude and unwrapped phase; (c, d) Fresnel transforms; (e, f) Filter bank peak outputs
6 Summary and Conclusions
A numerical modeling framework to study radar meteor trail echoes is developed and applied to meteor speed determination. The Fresnel transform method (Elford 2004) and its modification (Baggaley and Grant 2005) are studied and a signal processing interpretation is presented. We claim that the Fresnel transform is equivalent to passing the meteor return signal through a filter-bank in which each filter is tuned to a different trial speed and the shape of the waveform of each filter is identical to the derivative of the theoretical meteor return signal corresponding to that speed. Additionally, trying to find the steepest gradient of the Fresnel transform is equivalent to searching for the filter producing the maximum output peak value in our interpretation. Possible sensitivity of the Fresnel transform technique to background noise is pointed out and demonstrated using meteor trail modeling. Matched filtering is introduced as a possible alternative to the Fresnel transform which overcomes the noise sensitivity problem. Further, it is pointed out that although the Fresnel transform technique is directly inapplicable to data recorded at relatively long IPPs, use of a short effective IPP obtained by interpolation seems to alleviate the problem. Both techniques have been applied to data from a 30 MHz radar and close agreement between results demonstrated.
Notes
The bandwidth used for calculating SNR is taken as the band of frequencies that contain 99% of the signal energy.
References
D. Badger, Fine structure in radio meteor showers. PhD thesis, University of Adelaide, Adelaide, Australia (2002)
W.J. Baggaley, J. Grant, Earth Moon Planets 91, 601 (2005)
W.J. Baggaley, R.G.T. Bennett, D.I. Steel, A.D. Taylor, Q. J. R. Astronom. Soc. 35, 293 (1994)
W.J. Baggaley, R.G.T. Bennett, A.D. Taylor, Planet. Space Sci. 45, 577 (1997)
L. Campbell, W.G. Elford, Planet. Space Sci. 54, 317 (2006)
Z. Ceplecha, J. Borovicka, W.G. Elford, D.O. Revelle, R.L. Hawkes, V. Porubcan, M. Simek, Space Sci. Rev. 84, 327 (1998)
M.A. Cervera, W.G. Elford, D.I. Steel, Radio Sci. 32(2), 805 (1997)
J.L. Chau, R.F. Woodman, Atmos. Chem. Phys. 4, 511 (2004)
W.G. Elford, in Proceedings of Meteoroid 2001 Conference, Kiruna, Sweden, pp. 405–411
W.G. Elford, Atmos. Chem. Phys. 4, 911 (2004)
C.D. Ellyett, J.G. Davies, Nature 161, 596 (1948)
J.S. Hey, S.J. Parsons, G.S. Stewart, Mon. Not. R. Astron. Soc. 107, 176 (1947)
W.K. Hocking, Radio Sci. 35, 1205 (2000)
D.A. Holdsworth, W.G. Elford, R.A. Vincent, I.M. Reid, D.J. Murphy, W. Singer, Ann. Geophys. 25, 385 (2007)
D.L. Hysell, M. Yamamoto, S. Fukao, J. Geophys. Res. 107, 1 (2002)
D.L. Hysell, M.F. Larsen, Q.H. Zhou, Ann. Geophys. 22, 3277 (2004)
J.D. Mathews, J.F. Doherty, C.H. Wen, S.J. Briczinski, D. Janches, D.D. Meisel, J. Atmos. Solar-Terr. Phys. 65, 1139 (2003)
D.W.R. McKinley, Meteor Science and Engineering. (McGraw-Hill, 1961)
C.H. Wen, J.F. Doherty, J.D. Mathews, IEEE Trans. Geosci. Remote Sens. 42, 501 (2004)
Acknowledgements
The authors would like to thank D. L. Hysell for providing the St. Croix data used in this study. This work was supported by the National Science Foundation through NSF grant no. ITR/AP 04-27029 to The Pennsylvania State University. The authors also wish to thank the reviewers for several useful suggestions.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Roy, A., Doherty, J.F. & Mathews, J.D. Analyzing Radar Meteor Trail Echoes using the Fresnel Transform Technique: A Signal Processing Viewpoint. Earth Moon Planet 101, 27–39 (2007). https://doi.org/10.1007/s11038-007-9147-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11038-007-9147-5