
Abstract
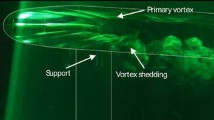
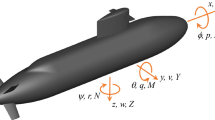
The present model geometry is a recent iteration of the Joubert (Defence Science and Technology, Tech. Rep. TR-1920, 2006) generic conventional submarine design and is known as the “BB2”. Wind-tunnel testing of the model at 10\(^\circ \) yaw, by China-clay visualisation and by ensemble-averaged measurements using high-resolution stereoscopic particle image velocimetry, shows a similar wake flow at the model-length Reynolds numbers \(Re_\mathrm{L} = 4 \times 10^6\) and \(8 \times 10^6\). The most significant flow feature is on the model upper hull. It is a system of three co-rotating vortices produced by a cruciform appendage which consists of a vertical fin (or sail in American terminology) and two horizontal hydroplanes. Circulation is strongest from the fin tip followed by the windward hydroplane, then the leeward hydroplane. Vortex tracking shows a down-wash of the fin-tip vortex, where the wind-ward- and lee-ward-hydroplane vortices spiral in the rotation direction of the fin-tip vortex. The interpreted flow includes a U-shaped vortex line around the leeward hydroplane, where this vortex line connects the fin-tip vortex and a surface vortex on the leeward side of the fin.












Similar content being viewed by others

References
Joubert PN (2004) Some aspects of submarine design part 1: hydrodynamics. Defence Science and Technology, Australia, Technical Report TR-1622
Joubert PN (2006) Some aspects of submarine design part 2: shape of a submarine 2026. Defence Science and Technology, Australia, Technical Report TR-1920
Renilson M (2018) Submarine hydrodynamics, 2nd edn. Springer, Berlin
Kumar C, Manovski P, Giacobello M (2012) Particle image velocimetry measurements on a generic submarine hull form. In: 18th Australasian fluid mechanics conference, Launceston, Australia, paper 188
Quick H, Widjaja R, Anderson B, Woodyatt B, Snowden A, Lam S (2012) Phase I experimental testing of a generic submarine model in the DSTO low speed wind tunnel. Defence Science and Technology, Australia, Technical Note TN-1101
Quick H, Woodyatt B (2014) Phase II experimental testing of a generic submarine model in the DSTO low speed wind tunnel. Defence Science and Technology, Australia, Technical Note TN-1274
Jones MB, Erm LP, Valiyff A, Henbest SM (2013) Skin-friction measurements on a model submarine. Defence Science and Technology, Australia, Technical Report TR-2898
Lee SK (2015) Topology model of the flow around a submarine hull form. Defence Science and Technology, Australia, Technical Report TR-3177
Anderson B, Chapuis M, Erm L, Fureby C, Giacobello M, Henbest S, Jones D, Jones M, Kumar C, Liefvendahl M, Manovski P, Norrison D, Quick H, Snowden A, Valiyff A, Widjaja R, Woodyatt B (2012) Experimental and computational investigation of a generic conventional submarine hull form. In: 29th Symposium on naval hydrodynamics, Gothenburg, Sweden
Fureby C, Anderson B, Clarke D, Erm L, Henbest S, Giacobello M, Jones D, Nguyen M, Johansson M, Jones M, Kumar C, Lee SK, Manovski P, Norrison D, Patterson K, Seil G, Woodyatt B, Zhu S (2016) Experimental and numerical study of a generic conventional submarine at \(10^\circ \) yaw. Ocean Eng 116:1–20
Bettle MC (2014) Validating design methods for sizing submarine tailfins. In: Warship 2014: naval submarines and UUVs, Bath, UK. Reprinted by Defence Research and Development Canada, DRDC-RDDC-2014-P24
Overpelt B, Nienhuis B, Anderson B (2015) Free running manoeuvring model tests on a modern generic SSK class submarine (BB2). In: Pacific International Maritime Conference, Sydney, Australia
Bettle MC (2018) Baseline predictions of BB2 submarine hydrodynamics for the NATO AVT-301 collaborative exercise. Defence Research and Development Canada, DRDC-RDDC-2017-R200
Conway AST, Valentinis F, Seil G (2018) Characterisation of suction effects on a submarine body operating near the free surface. In: 21st Australasian fluid mechanics conference, Adelaide, Australia, paper 766
Kim H, Ranmuthugala D, Leong ZQ, Chin C (2018) Six-DOF simulations of an underwater vehicle undergoing straight line and steady turning manoeuvres. Ocean Eng 150:102–112
Pook DA, Clarke DB, Jones M, Quick H, Ranmuthugala D (2018) RANS based CFD prediction of submarine hydrodynamic loads. In: 21st Australasian fluid mechanics conference, Adelaide, Australia, paper 695
Erm LP (2003) Calibration of the flow in the extended test section of the low-speed wind tunnel at DSTO. Defence Science and Technology, Australia, Technical Report TR-1384
Manovski P, Giacobello M, Jacquemin P (2014) Smoke flow visualisation and particle image velocimetry measurements over a generic submarine model. Defence Science and Technology, Australia, Technical Report TR-2944
Manovski P, Jones M, Henbest S, Xue Y, Giacobello M (2018) Boundary layer measurements on a slender body using long-distance PIV. In: 21st Australasian fluid mechanics conference, Adelaide, Australia, paper 610
Lee SK (2018) Longitudinal development of flow-separation lines on slender bodies in translation. J Fluid Mech 837:627–639
Lee SK, Jones MB (2018) Surface pressure of inclined slender-body flows. In: 21st Australasian fluid mechanics conference, Adelaide, Australia, paper 498
Tobak M, Peake DJ (1982) Topology of three-dimensional separated flows. Ann Rev Fluid Mech 14:61–85
Surana A, Grunberg O, Haller G (2006) Exact theory of three-dimensional flow separation. Part 1. Steady separation. J Fluid Mech 564:57–103
Simpson RL (2001) Junction flows. Ann Rev Fluid Mech 33:415–443
Willert C (1997) Stereoscopic digital particle image velocimetry for application in wind tunnel flows. Meas Sci Technol 8:1465–1479
Raffel M, Willert CE, Scarano F, Kähler CJ, Wereley ST, Kompenhans J (2018) Particle image velocimetry, 3rd edn. Springer, Berlin
Lee SK, Giacobello M, Manovski P, Kumar C (2014) Optimising camera arrangement for stereoscopic particle image velocimetry. In: 19th Australasian fluid mechanics conference, Melbourne, Australia, paper 39
Wieneke B (2005) Stereo-PIV using self-calibration on particle images. Exp Fluids 39:267–280
Michaelis D, Neal DR, Wieneke B (2016) Peak-locking reduction for particle image velocimetry. Meas Sci Technol 27:104005
Westerweel J, Scarano F (2005) Universal outlier detection for PIV data. Exp Fluids 39:1096–1100
Xue Y, Kumar C, Lee SK, Giacobello M, Manovski P (2018) Identification of a submarine fin-tip vortex using POD analysis. In: 21st australasian fluid mechanics conference, Adelaide, Australia, paper 609
Sciacchitano A, Wieneke B (2016) PIV uncertainty propagation. Meas Sci Technol 27:084006
Devenport WJ, Rife MC, Liapis SI, Follin GJ (2018) The structure and development of a wing-tip vortex. J Fluid Mech 312:67–106
Phillips WRC (1981) The turbulent trailing vortex during roll-up. J Fluid Mech 105:451–467
Willert CE, Gharib M (1991) Digital particle image velocimetry. Exp Fluids 10:181–193
Lawson NJ, Wu J (1997) Three-dimensional particle image velocimetry: error analysis of stereoscopic techniques. Meas Sci Technol 8:894–900
Acknowledgements
Model manufacturing and SPIV traverse automation by QinetiQ and the financial support by DST Maritime Division are acknowledged. Our thanks go to fellow DST colleagues and the anonymous referees for providing helpful feedback on this work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix 1: Bias error in experimental technique
Appendix 1: Bias error in experimental technique
For SPIV, the bias error \(\langle u \rangle _\mathrm{b}/U_{\infty }\) is approximated by the uncertainties in the length-scale conversion \((\delta _\mathrm{l})\), the laser timing \((\delta _t)\), the in-plane displacement \((\delta _{yz})\) and the out-of-plane displacement \((\delta _x)\), viz.,
The terms on the right side of Eq. 15 are described as follows.
-
For the uncertainty in length-scale conversion, \(\delta _\mathrm{l} / (r_\mathrm{m} / (R_\mathrm{l} \, r_\mathrm{s})) \simeq 4 \,\text {pixels} / (137\,\text {mm} / (10 \times 5.5\,\mu \text {m/pixel})) \simeq {\pm }\,0.002\), where \(r_s\) is the spatial resolution of the camera sensor or charge-coupled device and \(R_l\) is the reproduction ratio. The reference length \(r_\mathrm{m}\) is the maximum radius of the bare hull.
-
For the uncertainty in laser timing due to electronics jitter, \(\delta _t / \Delta t \simeq {\pm }\,0.001\), where \(\Delta t \simeq 11\,\upmu \)s to \(22\,\upmu \)s is the time interval applied between laser pulses.
-
For the uncertainty in the in-plane (yz) displacement, \(\delta _{yz}/\langle \mathbf {s}_{yz} \rangle \,\simeq \)\(0.125\,\text {pixels} / 7\,\text {pixels} \simeq {\pm }\,0.018\), where \(\langle \mathbf {s}_{yz} \rangle \simeq 0.6U_{\infty } \times \Delta t / (R_l \, r_s\)) is the resolvable particle-image displacement based on a maximum swirl velocity of \(\simeq 0.6U_{\infty }\). The uncertainty \(\delta _{yz} = f \{ \langle \mathbf {s}_{yz} \rangle \}\) is effectively a lower limit on resolvable displacement as a function of \(\langle \mathbf {s}_{yz} \rangle \)—it is taken from the digital particle-image-velocimetry analysis (fig. 6b) of [35]; the uncertainty is for a seeding density of \(\simeq \) 6 particles per \(32 \times 32\) pixels interrogation window.
-
For a symmetrical arrangement of SPIV cameras at oblique angles of 45\(^\circ \) from the laser sheet, the ratio between the in-plane and the out-of-plane particle-image displacement uncertainties is unity based on thin-lens ray-tracing analysis [27, 36]. Assuming that the field of view is not affected by optical aberrations or vignetting, and the measurement uncertainty is approximately homogeneous and isotropic, the uncertainty in the out-of-plane (x) displacement may be written as
$$\begin{aligned} \frac{\delta _{x}}{\langle \mathbf {s}_x \rangle } \simeq \frac{\delta _{yz}}{\langle \mathbf {s}_{yz} \rangle }. \end{aligned}$$(16)
To summarise, the in-plane and the out-of-plane displacement uncertainties are approximately the same \((\delta _{x}/\langle \mathbf {s}_x \rangle \simeq \delta _{yz}/\langle \mathbf {s}_{yz} \rangle \simeq {\pm }\,0.018)\), and are larger than the uncertainties in the length-scale conversion \(( \delta _l / (r_\mathrm{m} / (R_l \, r_s)) \simeq {\pm }\,0.002)\) and the laser timing \((\delta _t / \Delta t \simeq {\pm }\,0.001)\). Overall, by substituting Eq. 16 into Eq. 15, this gives the bias error \(\langle u \rangle _\mathrm{b}/U_{\infty } \simeq {\pm }\,0.026\).
About this article

Cite this article
Lee, SK., Manovski, P. & Kumar, C. Wake of a cruciform appendage on a generic submarine at 10\(^\circ \) yaw. J Mar Sci Technol 25, 787–799 (2020). https://doi.org/10.1007/s00773-019-00680-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-019-00680-x