Constrained Lagrangian dynamics based on reduced quasi-velocities and quasi-forces Farhad Aghili OriginalPaper 23 June 2021 Pages: 327 - 343
Time integration of rigid bodies modelled with three rotation parameters Stefan HolzingerJohannes Gerstmayr OriginalPaper Open access 08 February 2021 Pages: 345 - 378
A review of flexible multibody dynamics for gradient-based design optimization Veit GuflerErich WehrleAndreas Zwölfer ReviewPaper Open access 22 October 2021 Pages: 379 - 409
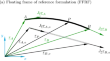
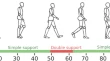
A new human-like walking for the humanoid robot Romeo A. KalouguineV. De-León-GómezY. Aoustin OriginalPaper 12 November 2021 Pages: 411 - 434