Inverse dynamic modelling of a three-legged six-degree-of-freedom parallel mechanism Sajeeva AbeywardenaChao Chen OriginalPaper 01 February 2016 Pages: 1 - 24
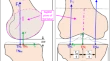
Simultaneous estimation of the path, magnitude and orientation of the femorotibial contact forces using bone geometry constraints: an exploratory numerical study for the stance phase of gait P. O. LemieuxT. CressonR. Aissaoui OriginalPaper 30 September 2016 Pages: 25 - 45
Modeling and simulation of structural components in recursive closed-loop multibody systems Mohamed A. Omar OriginalPaper 13 October 2016 Pages: 47 - 74
Linear dynamics of flexible multibody systems Jawhar ChebbiVincent DubanchetDaniel Alazard OriginalPaper 10 November 2016 Pages: 75 - 100