
Abstract
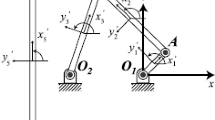
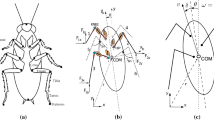
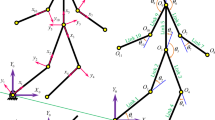
This article describes the structure of the cockroach-like robot. Both kinematics and locomotion control are inspired by biological observations in cockroaches. Based on cockroach-like robot kinematics analysis, screw theory, and the production-of-exponential (POE) formula, this paper focuses on the inverse kinematics which uses Paden-Kahan sub-problems to obtain directly the displacement of joint angles. The forward kinematics derives the relationship between joint angles according to the natural restrictions. Then, by using the POE formula, it can deduce the body pose and realize online trajectory control and planning. Through simulation and experimentation, it is proved that the straight-line walking and turning gait algorithms have static stability and the inverse kinematics analysis of cockroach-like robot is correct.
Similar content being viewed by others
References
Espenschied K S, Quinn R D, Chiel H J, et al. Leg coordination mechanisms in stick insect applied to hexapod robot locomotion [J]. Adaptive Behavior, 1993, 1(4): 455–468.
Nelson G M, Quinn R D. A numerical solution to inverse kinematics for swing control of a cockroachlike robot [C]//The Fourth International Conference on Climbing and Walking Robots: From Biology to Industrial Applications. Karlsruhe, Germany: Professional Engineering Publishing, 2001: 347–354.
Go Y, Yin Xiao-lei, Bowling A. Navigability of multi-legged robots [J]. IEEE / ASME Transactions on Mechatronics, 2006, 11(1): 1–8.
Weingarten J D, Lopes G A D, Buehler M, et al. Automated gait adaptation for legged robots [C]// 2004 IEEE International Conference on Robotics and Automation. New Orleans, LA, USA: IEEE, 2004: 2153–2158.
Saranli U, Koditschek D E. Template based control of hexapedal running [C]// IEEE International Conference on Robotics and Automation. Taipei: IEEE, 2003: 1374–1379.
Innocenti C. Direct kinematics in analytical form of the 6-4 fully-parallel mechanism [J]. Transactions of the ASME, Journal of Mechanical Design, 1995, 117(1): 89–95.
Nanua P, Waldron K J, Murthy V. Direct kinematic solution of a stewart platform [J]. IEEE Transactions on Robotics and Automation, 1990, 6(4): 438–443.
Chen Wei-hai, Zhou Jie, Yu Shou-qian, et al. Kinematic analysis and simulation for modular manipulators based on screw theory [J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(7): 814–818 (in Chinese).
Chen Wei-hai, Gao Yong, Yang Gui-lin, et al. Kinematic control of 3-legged modular reconfigurable parallel manipulators [J]. Chinese Journal of Mechanical Engineering, 2005, 41(8): 96–102 (in Chinese).
Nelson G M, Quinn R D. Posture control of a cockroach-like robot [C]// IEEE International Conference on Robotics and Automation. Leuven, Belgium: IEEE, 1998: 157–162.
Brockett R W. Robotic manipulators and the product of exponential formula [C]//Proceedings of the International Symposium on Mathematical Theory of Networks and Systems. Beer Sheba, Israel: Springer-Verlag, 1983: 120–129.
Park F C. Computational aspect of manipulators via product of exponential formula for robot kinematics [J]. IEEE Transactions on Automatic Control, 1994, 39(3): 643–647.
Chen I M, Yang G L. Inverse kinematics for modular reconfigurable robots [C]// IEEE International Conference on Robotics and Automation. Leuven, Belgium: IEEE, 1998: 1647–1652.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: the National High Technology Research and Development Program (863) of China (No. 2008AA04Z210), the National Natural Science Foundation of China (No. 60775059) and the Natural Science Foundation of Beijing (No. 3093021)
Rights and permissions
About this article
Cite this article
Gao, Y., Chen, Wh. & Lu, Z. Kinematics analysis and experiment of a cockroach-like robot. J. Shanghai Jiaotong Univ. (Sci.) 16, 71–77 (2011). https://doi.org/10.1007/s12204-011-1097-4
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12204-011-1097-4