
Abstract
The final piece of the Bayesian filter is the dynamics model. In object tracking, it is common to model either the velocity or the acceleration of the object as a random walk in two or three dimensions (e.g., [7]).
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
The final piece of the Bayesian filter is the dynamics model. In object tracking, it is common to model either the velocity or the acceleration of the object as a random walk in two or three dimensions (e.g., [7]). Such a model has the advantage of mathematical simplicity and can be adequate, particularly in applications where the delay between measurements is low and the area of interest is small. However, an integrated random walk is not adequate for prediction over long time periods, which is required for applications where the delay between measurements is significant. In the case of MH370, the area of interest is vast and the measurements are extremely sparse in time, occurring approximately hourly. The aircraft is believed to have turned at least once after loss of radar contact, so the dynamics model needs to be adaptive enough to accommodate realistic aircraft manoeuvres and yet not so loose as to cause unrealistic spreading of the state posterior pdf over the whole BTO arc. This is not possible with simple integrated random walk models, so more sophisticated approaches are required.
The dynamics model that was adopted for this analysis consists of a random sequence of deliberate manoeuvres interspersed with periods of cruise, in which the speed and direction are almost constant. This model is motivated by [12, 16]. Commercial aircraft typically operate by setting a desired air speed in terms of a Mach number, which is the ratio of the aircraft speed relative to the air mass around it to the speed of sound. During cruise the aircraft autopilot system seeks to maintain a constant Mach number, altitude and control angle (e.g., heading or track), though random fluctuations will occur in each of these.
Three types of manoeuvre were considered: coordinated turns, where the aircraft maintains a constant speed and changes control angle; altitude changes that occur under constant control angle and speed; and accelerations, where the aircraft maintains a constant control angle and altitude and changes speed (Mach number). Details of the statistical models used for manoeuvres are presented in Chap. 7, while details about the cruise model are provided in this chapter.
6.1 Ornstein–Uhlenbeck Process
As discussed above, it would be inappropriate to assume a random walk in either speed or direction because, over the long duration between measurements, such a model would either apply significant probability to speeds which are kinematically infeasible (if the noise strength was significant), or fail to model the statistical variability that flight paths tend to exhibit (if the noise strength was very small). Instead an Ornstein–Uhlenbeck (OU) process [41] was adopted to model the speed and direction under control. Under this model, random perturbations are permitted, but the values tend to revert back to a prescribed set point. Denoting the quantity being controlled as \(x(t)\) and the prescribed set point as \(\bar{x}(t)\), the model is specified in continuous time as
The parameters of the model are the reversion rate \(\beta \); the strength q of the Brownian motion process \(v(t)\); and the set point \(\bar{x}(t)\). The set point is accommodated through the sampling procedure described in Chap. 7, while the reversion rate and noise strength are selected using a maximum likelihood procedure operating on logged aircraft flight data from other flights using the same aircraft type, as will be described shortly.
For a linear, time invariant, continuous time stochastic differential equation of the form
the equivalent discrete process is
where \(\varvec{\varPhi }_k\) is the system matrix, calculated using the matrix exponential
and the covariance of the noise \(\mathbf {v}_k\) is
where \(\mathbf {q}(\tau )\) is again the strength of the vector Brownian motion [30, 41], here assumed constant. In this general case \(\mathbf {x}\) is a vector and \(\varvec{\varPhi }\) is a matrix. For the OU process, we consider a scalar state \(x\) and a scalar system matrix \(\varPhi \)
where \(\bar{x}_k=\bar{x}(t_k)\) and
The variance of the process noise \(w_k\) is:
If the difference in time between two samples is large, then the new value of the OU process is only weakly correlated with the previous value. This can be seen by taking the limit of (6.7) and (6.8) as the difference in time increases: the expected value converges to \(\bar{x}_k\), and the variance converges to a steady state value of \(\frac{q}{2 \beta }\).
When an OU process is used to model velocity, the position that results from integrating the velocity is an Integrated Ornstein–Uhlenbeck process. Analytic expressions for the parameters of this process can also be determined in closed form. In the present context, the overall velocity is constructed as a nonlinear composition of several OU processes, as described below. Consequently, position is determined through numerical integration of the velocity over small time steps.
6.1.1 Determining Process Parameters
Logged aircraft flight data from several flights were analysed in order to select the parameters \(\beta \) and q of the OU processes for Mach number, wind, and angle. The log data includes variables such as position, velocity, Mach number, heading, and local wind velocity. In particular the log contains each quantity that is modelled using the OU process, namely Mach number, wind, and direction. This means that a maximum likelihood process can be applied directly (e.g., [37, 44]), rather than requiring more complicated system identification techniques (e.g., [27]).
In the first step, the data was manually segmented into trajectory parts that do not include manoeuvres (such as altitude, speed or direction changes). This yields \(L\) sequences, where the \(l\)th sequence is \((x_{l,1},\ldots ,x_{l,K_l})\), and the time of element \(x_{l,k}\) is \(t_{l,k}\). The unknown parameters are the reversion rate \(\beta \), the noise strength q and the nominal set point \(\bar{x}_l\) for each sequence (which is treated as a non-random nuisance parameter). Defining \(\varvec{\theta }=(\beta ,q,\bar{x}_1,\ldots ,\bar{x}_L)\), the overall log likelihood of the observed data is:
where \(\varPhi _{l,k}\) and \(Q_{l,k}\) are given by (6.7) and (6.8) respectively, and C is a constant that does not depend on the parameter vector \(\varvec{\theta }\). Given a value of \(\beta \), it is possible to maximise over \((q,\bar{x}_1,\ldots ,\bar{x}_L)\) in closed form, thus parameter identification can be performed simply using a line search.
In reality, the data stored in the aircraft log files are not exact values, but rather filtered estimates provided by the on-board navigation system. Since the complete information state of the estimators is not provided, the time correlation structure is unknown. However, our interest in the present context is in predictions over significant periods of time, so log data was sub-sampled such that the time between samples ranges between 60 and 300 s. It is assumed that, over this period, the time correlation of the estimates has decayed to such a point that it is dominated by the natural variability of the process.
6.2 Mach Number
In the most common modes of operation, commercial aircraft maintain an approximately constant Mach number, i.e., the ratio between the true air speed of the aircraft, and the speed of sound in the airmass around the aircraft. The speed of sound in an ideal gas is dependent only on the air temperature:
where \(\gamma \approx 1.40\) is the adiabatic index, \(\mathcal {R} \approx {8.314}\,{\text {J}}{\text { mol}}^{-1}{\text { K}}^{-1}\) is the molar gas constant, M is the molar mass of the gas (\(\approx \! {0.02896}\,\mathrm{{kg}}\,{\mathrm{{mol}}^{-1}}\) for dry air), and T is the absolute temperature (in Kelvins) [26].
Thus the true air speed of the aircraft is given by
where T is the temperature at the aircraft location and \(m\) is the Mach number. The consequence of the dependence of speed of sound on temperature is that changes in temperature (including those due to changes in altitude) cause changes in air speed. The air temperature data used in this study was provided by the Australian Bureau of Meteorology, from the Australian Community Climate and Earth-System Simulator (ACCESS) Global model, referred to as ACCESS-G, outlined in [6]. Further details of this data source are discussed in Sect. 6.4.
Even though the aircraft may seek to hold the Mach number constant, fluctuations can and do occur, e.g., due to turbulence and imperfect control. An OU model is used to represent this variability. The parameters \(\beta _\mathsf {mach}= 1.058\times 10^{-2}\) and \(q_\mathsf {mach}= 2.05\times 10^{-7}\,\mathrm{{s}}^{-1}\) were calculated using the procedure in Sect. 6.1.1 based on historical logged flight data, and represent the combination of these sources of fluctuations. The steady state standard deviation under this model is \(3.113\times 10^{-3}\). Note that Mach number is dimensionless.
6.2.1 Cost Index
Another commonly used mode of speed control is Cost Index. In this mode, the air speed is selected dynamically to optimise a combination of fuel consumption and travel time [34]. The pilot specifies a Cost Index value, which indicates the relative importance of fuel and travel time. The autopilot system then dynamically selects a Mach number based on the aircraft weight and altitude. This mode was simulated by randomly sampling a Cost Index value and altitude, and then using lookup tables based on proprietary data provided by Boeing.
The effect of the dynamic optimisation is that the air speed will tend to drop over time if the altitude is held constant. The effect is more noticeable at lower altitudes. During normal operation it is typical for the pilot to initiate climbs in altitude and the effect is less noticeable. The effect is not evident in the validation flights studied in Chap. 9 because in each of these flights the aircraft altitude increases with time. For this reason, the majority of the experiments presented in this book do not use the Cost Index mode. Additional experiments were performed using the Cost Index mode for the accident flight. The result was a slight narrowing of the pdf as compared to the Mach number model, as discussed in Sect. 10.7.
6.3 Control Angle
The motion of an aircraft relative to the Earth is influenced by the weather in its environment, particularly the wind. The aircraft heading (i.e., the direction in which the nose points) and air speed determine its motion relative to the local air mass but the motion relative to the Earth is a vector sum of the air velocity and wind velocity
as shown in Fig. 6.1. We refer to the bearing angle of the ground velocity as the aircraft’s track; elsewhere the term course is also used. It is the track that determines motion relative to locations on the Earth’s surface, not the direction in which the aircraft’s nose points. Similarly, the ground speed is determined from the magnitude of the vector sum in (6.13) and Fig. 6.1. It is generally assumed in this book that the aircraft can drive a control loop to influence Mach number and hence air speed but that the resulting ground speed is somewhat at the mercy of the wind.

Ground velocity is determined from the vector sum of the velocity relative to the local air mass, and the velocity of the local air mass, i.e., the wind. The heading is the direction in which the aircraft is pointing, which is notionally the same as the direction in which it is moving relative to the local air mass, \(\theta _a\). The track is the direction in which the aircraft is moving with respect to the ground, \(\theta _g\)
The control angle is assumed to follow an OU process as described above for the Mach number. The model parameters for the control angle OU process (in units of radians) are \(\beta _\mathsf {angle}=9.792 \times 10^{-3}\), and \(q_\mathsf {angle}= 4.074 \times 10^{-8}\,\mathrm{{rad}}^{2}\,\mathrm{{s}}^{-1}\).
Between aircraft manoeuvres, the aircraft motion is notionally straight and level. Commercial aircraft are generally designed to operate under autopilot assistance and it would be highly abnormal for a pilot to maintain direct control of this type of aircraft for any extended period. There are five different modes in which the aircraft autopilot can be programmed for steady flight. The first four of these correspond to different definitions of the aircraft control angle \(\theta (t)\). The last is used for navigation to a specified location.
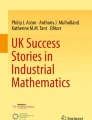
The different definitions of control angle enumerate the combinations of maintaining a steady heading or track relative to a magnetic or geographic bearing; these angles are defined in Fig. 6.1. The direction of the Earth’s magnetic field is not aligned with the geographic poles and so angles measured with a magnetic compass are not the same as angles measured with respect to the geographic poles. The difference between the two angles is referred to as magnetic declination [11]. Angles measured with respect to the poles are referred to as true angles whereas angles measured by compass are referred to as magnetic angles. Magnetic declination varies with position on the Earth’s surface, so a particular magnetic angle corresponds to different true angles at different locations. Figure 6.2 shows a map of magnetic declination for the Indian Ocean region. There are significant variations in magnetic declination in the areas through which the accident flight is thought to have flown. If the aircraft had been following a fixed compass reading then it would appear to gradually turn. Each of the different autopilot modes is now briefly described.

Magnetic declination (degrees) at 40,000 ft on 07 March, 2014. Source NOAA [31]
6.3.1 Constant Magnetic Heading
In Constant Magnetic Heading mode, the aircraft aims to hold a steady air speed and magnetic heading, so variations in ground velocity will occur due to variations in wind, and magnetic declination. The bearing of the air velocity is determined by adding the magnetic declination \(\phi (\mathbf {x})\) to the control angle
The North and East ground velocity components follow directly from the vector sum,
6.3.2 Constant True Heading
In Constant True Heading mode, the aircraft aims to hold a steady air velocity, i.e., air speed and true (non-magnetic) heading. This is the same as Constant Magnetic Heading except that the magnetic declination is not applied to the control angle,
6.3.3 Constant Magnetic Track
In Constant Magnetic Track mode, the aircraft aims to hold the direction of the ground velocity vector, relative to magnetic North, constant. The autopilot automatically adjusts the aircraft heading to compensate for the wind so that the vector sum of the air velocity and the wind velocity aligns with the desired track angle. The aircraft measures the wind, so the direction and magnitude of the wind velocity vector (i.e. \(\theta _\mathsf {wind}\) and \(v_\mathsf {wind}\)) are known. The air speed \(v_\mathsf {air}\) is controlled as is the ground velocity angle \(\theta _\mathsf {ground}\). Once again the control angle is corrected by the magnetic declination to give the true track angle
With reference to the triangle geometry in Fig. 6.1, the lengths of two of the sides are known and the angle between the track angle and the wind angle defines the angle shown at the top of the triangle. The ground speed can be determined using the cosine rule, resulting in:
6.3.4 Constant True Track
In Constant True Track mode, the aircraft aims to hold the true direction of the ground velocity vector constant. In terms of the model this is the same as Constant Magnetic Track except that the magnetic declination is not applied to the control angle,
6.3.5 Lateral Navigation
The fifth mode is referred to as lateral navigation and implies that the aircraft follows a great elliptical path to a prescribed destination. This is the type of navigation typically used between way points. In this mode a fixed latitude and longitude would be defined and the autopilot would determine the geodesic (shortest constant altitude path) linking this destination with the current location. Under lateral navigation, the aircraft heading and track angles will gradually change. In the present context, lateral navigation is similar to Constant True Track, except that the control angle (i.e., the track) varies as the aircraft moves.
The path travelled under lateral navigation can be determined using Vincenty’s reckoning algorithm [46]. The ground velocity is calculated given the local track angle as for Constant True Track, and Vincenty’s algorithm is used to calculate both the new location and the updated track angle required to remain on the same great elliptical path (given a small time step size).
Whereas other autopilot modes follow the same control angle indefinitely until the pilot modifies settings, lateral navigation permits the pilot to program a sequence of waypoints that can be either pre-defined, named waypoints, or manually entered coordinates. The autopilot constructs a route which passes through each in turn, following great elliptical paths between them. One way of simulating lateral navigation would be to draw a random sequence of waypoints and this would be quite successful for typical commercial flights. However, custom waypoints can be entered and on an atypical flight could even be likely. In the present context, these deliberate manoeuvres are modelled as changes in the control angle, as with other modes.
Expert advice indicates that if the autopilot system is operating in lateral navigation mode and it reaches the final programmed waypoint, then it reverts to the previously selected heading hold mode, i.e., Constant Magnetic Heading or Constant True Heading. This behaviour has been modelled by simulating a process which switches from lateral navigation to either Constant Magnetic Heading or Constant True Heading at a random time. This is effectively a special manoeuvre that can only happen once. The probability that the switch occurs at time t is modelled as exponentially distributed with a mean time of 6/\(\ln (2)\) hours, which means that the probability of switching in 6 h is 0.5. The exponential model is discussed in detail in the next chapter.
6.4 Wind
As described in the preceding sections, the aircraft controls air speed and either heading or track angle. In Constant Magnetic/True Heading modes, the wind will influence both the ground speed and the ground track angle. In Constant Magnetic/True Track and lateral navigation modes, the wind will influence the ground speed. For this reason, wind must be incorporated into the analysis.
The wind data used in this study was provided by the Australian Bureau of Meteorology from the ACCESS-G model, outlined in [6]. The model provides estimates of wind at air pressures from 150 to 300 hPa in 25 hPa steps and from 300 to 500 hPa in 50 hPa steps. This corresponds to an altitude range from approximately 18,000 to 44,000 ft. The model provides predictions every three hours at latitudes and longitudes spaced by \({0.375}^{\circ }\) and \({0.5625}^{\circ }\) respectively. Linear interpolation is performed in time, altitude, latitude and longitude. An example of the model output is shown in Fig. 6.3.

Wind data for 8 March 2014, 00:00, at 175 hPa (approximately 41,000 ft). Contour lines are drawn every 5 kn. The zonal component of the wind is the component blowing toward the East, while the meridional component is the component blowing toward the North
The predictions provided by the climate model are averages over time and space, so even if they are very accurate they do not exactly provide the wind experienced at a particular location and time. For this reason, two independent OU processes are used to model the error in the Eastern and Northern components of the wind data. Parameters of the model were determined using the process described in Sect. 6.1.1 based on logged aircraft flight data (i.e., using the predicted wind value as the nominal set point). The OU process (in units of knots) parameter values were found to be \(\beta _\mathsf {wind}=0.001087\), and \(q_\mathsf {wind}=0.07021\,\mathrm{{kn}}^{2}\,\mathrm{{s}}^{-1}\). This corresponds to a steady state standard deviation of 5.684 kn.
6.5 Altitude
The measurements available from the Inmarsat satellite are largely insensitive to the aircraft altitude, but modelling of altitude is necessary due to the coupling of altitude, air temperature and air speed (via the Mach number), and due to the variation of wind with altitude. This is modeled by assuming that altitude is constant during cruise, but permitting deliberate changes in altitude as described in Chap. 7.
6.6 Putting It Together
In summary, the process for simulating aircraft cruise dynamics follows these steps:
-
1.
Simulate the Mach number using the OU process:
$$ m_k= \bar{m}_k+ \varPhi _{k,\mathsf {mach}} (m_{k-1}-\bar{m}_{k-1}) + w_{k,\mathsf {mach}} $$where \(w_{k,\mathsf {mach}}\) is a zero-mean, Gaussian random variable with variance \(Q_{k,\mathsf {mach}}\), and \(\varPhi _{k,\mathsf {mach}}\) and \(Q_{k,\mathsf {mach}}\) are calculated with (6.7) and (6.8) using \(\beta _\mathsf {mach}\) and \(q_\mathsf {mach}\).
-
2.
Simulate the control angle using the OU process:
$$ \theta _k= \bar{\theta }_k+ \varPhi _{k,\mathsf {angle}} (\theta _{k-1}-\bar{\theta }_{k-1}) + w_{k,\mathsf {angle}} $$where \(w_{k,\mathsf {angle}}\) is a zero-mean, Gaussian random variable with variance \(Q_{k,\mathsf {angle}}\), and \(\varPhi _{k,\mathsf {angle}}\) and \(Q_{k,\mathsf {angle}}\) are calculated with (6.7) and (6.8) using \(\beta _\mathsf {angle}\) and \(q_\mathsf {angle}\).
-
3.
Look up temperature in prediction table, store as \(T_k\). Calculate true air speed as:
$$ v_{k,\mathsf {air}} = m_k\sqrt{ \frac{\gamma \, \mathcal {R} T_k}{M} } $$ -
4.
Look up wind in prediction table, store values as \(\bar{v}_{k,\mathsf {wind}}^\mathsf {north}\) and \(\bar{v}_{k,\mathsf {wind}}^\mathsf {east}\). Simulate the true wind using the OU process:
$$\begin{aligned} v_{k,\mathsf {wind}}^\mathsf {north}= & {} \bar{v}_{k,\mathsf {wind}}^\mathsf {north} + \varPhi _{k,\mathsf {wind}} (v_{k-1,\mathsf {wind}}^\mathsf {north}-\bar{v}_{k-1,\mathsf {wind}}^\mathsf {north}) + w_{k,\mathsf {wind}}^\mathsf {north} \\ v_{k,\mathsf {wind}}^\mathsf {east}= & {} \bar{v}_{k,\mathsf {wind}}^\mathsf {east} + \varPhi _{k,\mathsf {wind}} (v_{k-1,\mathsf {wind}}^\mathsf {east}-\bar{v}_{k-1,\mathsf {wind}}^\mathsf {east}) + w_{k,\mathsf {wind}}^\mathsf {east} \end{aligned}$$where \(w_{k,\mathsf {wind}}^\mathsf {north}\) and \(w_{k,\mathsf {wind}}^\mathsf {east}\) are zero-mean, Gaussian random variables with variance \(Q_{k,\mathsf {wind}}\), and \(\varPhi _{k,\mathsf {wind}}\) and \(Q_{k,\mathsf {wind}}\) are calculated with (6.7) and (6.8) using \(\beta _\mathsf {wind}\) and \(q_\mathsf {wind}\).
-
5.
Calculate ground velocity \(\mathbf {v}_\mathsf {ground}\) from air speed, control angle and wind velocity based on mode in use, as described in Sect. 6.3.
-
6.
Using ground velocity, predict forward to calculate new position.
The lateral navigation autopilot model uses a time step of 60 s. Although it is possible to determine great elliptical paths with a very high degree of accuracy, the wind is spatially varying and the model samples the residual wind error, so larger steps are not appropriate. The other autopilot models use numerical approximations to propagate the state so a shorter time step is appropriate: we used a time step of 10 s.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This chapter is distributed under the terms of the Creative Commons Attribution-NonCommercial 4.0 International License (http://creativecommons.org/licenses/by-nc/4.0/), which permits any noncommercial use, duplication, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, a link is provided to the Creative Commons license and any changes made are indicated.
The images or other third party material in this chapter are included in the work’s Creative Commons license, unless indicated otherwise in the credit line; if such material is not included in the work’s Creative Commons license and the respective action is not permitted by statutory regulation, users will need to obtain permission from the license holder to duplicate, adapt or reproduce the material.
Copyright information
© 2016 Commonwealth of Australia
About this chapter
Cite this chapter
Davey, S., Gordon, N., Holland, I., Rutten, M., Williams, J. (2016). Aircraft Cruise Dynamics. In: Bayesian Methods in the Search for MH370. SpringerBriefs in Electrical and Computer Engineering(). Springer, Singapore. https://doi.org/10.1007/978-981-10-0379-0_6
Download citation
DOI: https://doi.org/10.1007/978-981-10-0379-0_6
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-0378-3
Online ISBN: 978-981-10-0379-0
eBook Packages: EngineeringEngineering (R0)