
Abstract
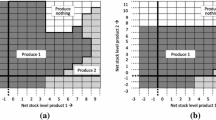
The multi-dimensionality of most practical problems is probably the main cause of the lack of applications of dynamic programming. In production-inventory problems for instance one uses rolling plans in general. By choosing the planning horizon large enough one may hope that the decisions made now are not too bad for the future. Instead of the explicit state evaluation of dynamic programming one has here a kind of implicit state evaluation. Exact state evaluation is indeed not possible by the dimensionality of the problems. But heuristic methods of state evaluation may be a good alternative and have been investigated only incidentally. We will illustrate here such a heuristic.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

Reference
Clark, A.J. and Scarf, H.E. (1960) “Optimal policies for a multi-echelon problem, Mgmt. Sc. 6, 475–490.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1980 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Wijngaard, J. (1980). Decomposition in Stochastic Dynamic Programming for Production and Inventory Control. In: Schwarze, J., von Dobschütz, L., Fleischmann, B., Schneeweiß, C., Steckhan, H. (eds) Vorträge der Jahrestagung 1979 / Papers of the Annual Meeting 1979. Proceedings in Operations Research 9, vol 1979. Physica, Heidelberg. https://doi.org/10.1007/978-3-662-00401-2_82
Download citation
DOI: https://doi.org/10.1007/978-3-662-00401-2_82
Publisher Name: Physica, Heidelberg
Print ISBN: 978-3-7908-0223-8
Online ISBN: 978-3-662-00401-2
eBook Packages: Springer Book Archive