
Abstract
The introductory material first relates the general background of the robustness problem. This is followed by more specific material giving the context for the LQG and polynomial systems approach to the problem of H∞ optimal control design.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Abbreviations
- ℝ:
-
set of real numbers
- ℝn :
-
n-tuple of real numbers
- ℝnxm :
-
nxm — tuple of real numbers
- ℙ(.):
-
set of polynomials with real coefficients
- ℝ(.):
-
set of ratios a(.)/b(.) where a,b ε ℙ(.)
- Toep(A):
-
Toeplitz matrix formed from A ε ℙ (.)
- Toep(A) Δ:
-
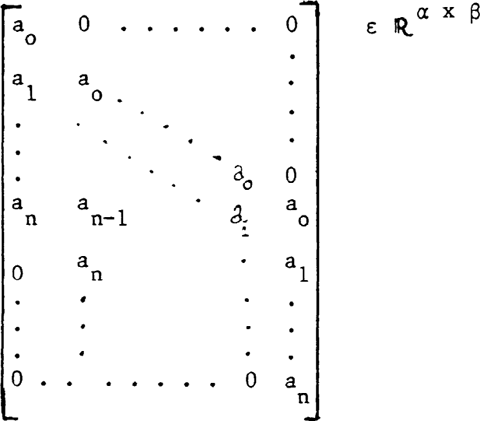
where A = a0 + a1z-1 +...+ anz-n ε ℙ(z-1) and dimensions α, β depend on the order of the polynomial multiplication being represented.

References
Horowitz, I., ‘Synthesis of Feedback Systems’, Academic Press, New York, 1963.
Safonov M.G., and Athans, M., ‘Gain and phase margin for multiloop LQG regulators’, IEEE Trans, on Automatic Control, Vol. AC-22, No. 2, pp. 173–179, 1977.
Doyle, J.G., ‘Guaranteed margins for LQG regulators’, IEEE Trans. Automatic Control, Vol. AC-23, No. 4, pp. 756–757, 1978.
Doyle J.C., and Stein, G., ‘Robustness with observers’, IEEE Trans. Automatic Control, Vol. AC-24, No. 4, pp. 607–611, August 1979.
Moore, J.B. and Blight, J.D., ‘Performance and robustness trade-offs in LQG regulator design’, IEEE CDC Conference, San Diego, USA, pp. 1191–1200, 1981.
Grimble, M.J., ‘Robustness of combined state and state-estimate feedback control schemes’, IEEE Trans. Automatic Control, Vol. AC-29, No. 7, pp. 667–669, July 1984.
Safonov, M.G., Laub, A.J., and Hartmann, G.L., ‘Feedback properties of multivariable systems: The role and use of the return difference matrix’, IEEE Trans. Automatic Control, Vol. AC-26, pp. 47–65, 1981.
Grimble, M.J., ‘Robust LQG design of discrete systems using a dual criterion’, IEEE CDC Conference, San Antonio, Texas, 1983.
Zaraes, G., 1981, ‘Feedback and optimal sensitivity: Model reference transformations, multiplicative seminorms, and approximate inverses’, IEEE Trans. Automatic Control Vol. AC-26, No. 2, pp. 301–320, 1981.
Freudenberg J.S. and Looze, D.P., ‘An analysis of H-optimization design methods’, Research Report, Co-ordinated Science Laboratory University of Illinois, 1983.
Zames, G., and Francis, B.A., ‘A new approach to classical frequency methods: Feedback and minimax sensitivity’, IEEE CDC Conference, San Diego, California, 1981.
Kwakernaak, H., ‘Optimal robustness of linear feedback systems’, Research Report, Mem. Nr.395, Dept. of Appl. Maths, Twente University of Tech. Enschede, The Netherlands, July, 1982.
Kwakernaak, H., ‘Robustness optimization of linear feedback systems’, 22nd IEEE CDC Conference, San Antonio, Texas, Dec. 1983.
Kwakernaak, H., ‘Minimax frequency domain optimization of multivariable linear feedback systems’, IFAC World Congress, Budapest, Hungary, 1984.
Kwakernaak, H., ‘Minimax frequency domain performance and robustness optimization of linear feedback systems’, IEEE Trans. Automatic Control, AC-30, No. 10, pp. 994–1004, 1985.
Grimble, M.J., ‘Controller for LQG self-tuning applications with coloured measurement noise and dynamic costing’, Proc. IEE Pt. D, Vol. 133, No. 1, Jan. 1986.
Grimble, M.J., ‘Optimal H -robustness and the relationship to LQG design problems’, Int. J. of Control, Vol. 43, No. 2, pp. 351–372, January 1986.
Saeki, M., ‘Polynomial approach to H∞ — optimal control problem for a discrete time system’. Report ICU/103/1986, Industrial Control Unit, University of Strathclyde, Glasgow, Scotland, UK, (Submitted for Publication).
Saeki, M., and Kornegoor, E., ‘Numerical algorithm for solving a polynomial equation in an H -optimization problems’ Report ICU/121 /1986, Industrial Control Unit, University of Strathclyde, Glasgow, Scotland, UK.
Grimble, M.J., ‘LQG design of discrete systems using a dual criterion’, IEE Proc. Vol. 132, No. 2, pp. 612–68, 1985.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1987 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Saeki, M., Grimble, M.J., Kornegoor, E., Johnson, M.A. (1987). H∞ — Optimal Control, LQG Polynomial Systems Techniques and Numerical Solution Procedures. In: Curtain, R.F. (eds) Modelling, Robustness and Sensitivity Reduction in Control Systems. NATO ASI Series, vol 34. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-87516-8_21
Download citation
DOI: https://doi.org/10.1007/978-3-642-87516-8_21
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-87518-2
Online ISBN: 978-3-642-87516-8
eBook Packages: Springer Book Archive