
Summary
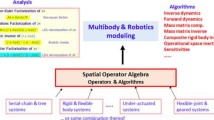
Space applications include problems where particularly complex multibody motion needs to be designed, analyzed, and verified: actively controlled satellites with flexible appendages, docking spacecraft, space robots on orbiting platforms. Computer simulation is one of the chief means to support these goals. Two “traditional” classes of tools are characterized by their capabilities and limitations: nonlinear dynamic simulation software and 3D solid model-based CAD systems with kinematic analysis features. An environment is proposed where the two classes can be integrated in a synergistic fashion to support the complete design and analysis cycle. The benefits of this concept are discussed and realizations at Dornier are introduced together with examples from recent applications and an outlook on further developments.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Putz, P.: Using Solid Modeling to Design Space Systems. IBM Seminar on Advanced Engineering Techniques, La Hulpe, Belgium (1987).
Aeritalia: Dynamic Control and Analysis Package (DCAP), Re 1. 5, Theoretical Manual. D2-MA-AI-002, Issue 2 (1987).
Eichberger, A.: Modeling, Control, and Simulation of Elastic Space Robots. Diploma Thesis, TU München, Inst. B f. Mechanik (1987).
Ersü, E. et al: ROBSCAD - A Software Package for Dynamic Simulation and Design of Industrial Robots and Control Components. In: VDI-Bericht 598 “Steuerung und Regelung von Robotern, pp. 15–26. Düsseldorf, VDI Verlag 1986 (in German).
Dornier System GmbH: AOCSIM User’s Manual (1988).
Requicha, A.A.G. and Voelcker, H.B.: Solid Modeling-Current Status and Research Directions. IEEE Computer Graphics and Applications, Vol. 3, Nr. 7 (1983) 25–37.
IBM, CATIA Product Description, Program Nr. 5668–836 (1986).
IBM, CAEDS Product Description, G320–9434–1 (1986).
Derby, S.J.: Computer Graphics Robot Simulation Programs - A Comparison. ASME Robotics Research and Advanced Applications. Winter Annual Meeting (1982) 203–211.
Dombre, E.; Fournier, A.; Quaro, C. and Borrel, P.: Trends in CAD/CAM Systems for Robotics. Proc. 1986 IEEE Int. Conf. on Robotics and Automation (1986) 1913–1918.
Fernandez, K.: The Use of Computer Graphic Simulation in the Development of Robotic Systems. International Aerospace Conference IAF 86 (1986).
Baumann, E.W.: Real-Time Graphic Simulation for Space Telerobotics Applications. Proc. NASA-JPL Workshop on Space Telerobots, OPL Publ. 87–13, Vol. 2 (1987) 207–217.
Putz, P.: An Integrated Software Environment for Simulation of Multibody System Dynamics. Dornier System R + D Report 79 696 (1985).
Finsterwal der, R.: Dynamic Simulation and Control of Space Manipulators. Diploma Thesis, Univ. Stuttgart, Inst. A f. Mechanik (1986).
Putz, P. and Hilzenbecher, U.: 3D Solid Modeling for Graphical Simulation of Robot Dynamics. In: VDI Bericht 598 “Steuerung und Regelung von Robotern”, pp. 39–50. Düsseldorf: VDI Verlag 1986 (in German).
Mau, K.-D.: Advanced Simulation and Control of a Space Manipulator. Diploma Thesis, Univ. Stuttgart, Inst. A f. Mechanik (1987).
Dillmann, R. and Huck, M.: A Software System for the Simulation of Robot Based Manufacturing Processes, Robotics 2 (1986) 3–18.
Williams, S.J.: The Use of ROSI in Robot Dynamic Simulation. ARI Nuclear Robotic Workshop (1987).
Harrison, F.W. and Pennington, J.E.: Systems Simulations Supporting NASA Te1erobotics. Proc. NASA-JPL Workshop on Space Telerobots, JPL Publ. 87–13, Vol. 2 (1987) 293–299.
Brown, R. et al: A Space Systems Perspective of Graphics Simulation Integration. Proc. NASA-JPL Workshop on Space Telerobots, JPL Publ. 87–13, Vol. 2 (1987) 267–272.
Pronk, C.N.A. et al.: Definition of the EUROSIM Simulation Subsystem. 1st European In-Orbit Operations Technologies Sympos., ESA SP-272 (1987).
Baker, M. et al.: Space Station Multidisciplinary Analysis Capability - IDEAS2, AIAA Conference (1985).
Putz, P.; Mau, K.-D. and Eichberger, A.: Integrated CAE Tools for Robot System Design and Analysis. Dornier System R + D Report 79986 (1987).
Haase, E.: An Approach towards Integrated Information Processing in Computer Analysis. In: VDI Tagung Fahrzeugbau: Berechnung im Automobilbau (1984), in German.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1989 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Putz, P. (1989). Graphical Verification of Complex Multibody Motion in Space Applications. In: Schweitzer, G., Mansour, M. (eds) Dynamics of Controlled Mechanical Systems. International Union of Theoretical and Applied Mechanics. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-83581-0_8
Download citation
DOI: https://doi.org/10.1007/978-3-642-83581-0_8
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-83583-4
Online ISBN: 978-3-642-83581-0
eBook Packages: Springer Book Archive