
Abstract
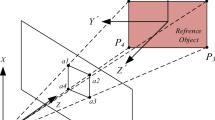
The accuracy of 3-D reconstructions depends substantially on the accuracy of active vision system calibration. In this work, the problem of video projector calibration is solved by inverting the standard camera calibration work flow. The calibration procedure requires a single camera, which does not need to be calibrated and which is used as the sensor whether projected dots and calibration pattern landmarks, such as the checkerboard corners, coincide. The method iteratively adjusts the projected dots to coincide with the landmarks and the final coordinates are used as inputs to a camera calibration method. The otherwise slow iterative adjustment is accelerated by estimating a plane homography between the detected landmarks and the projected dots, which makes the calibration method fast.
Chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Ansar, A., Daniilidis, K.: Linear pose estimation from points or lines. IEEE PAMI 25(5) (2003)
Bouguet, J.Y.: Camera calibration toolbox for Matlab, http://www.vision.caltech.edu/bouguetj/calib_doc/
Drareni, J., Roy, S., Sturm, P.: Geometric video projector auto-calibration. In: CVPR Workshop on Projector-Camera Systems (2009)
Furukawa, Y., Ponce, J.: Accurate camera calibration from multi-view stereo and bundle adjustment. Int. J. Comput. Vis. 84, 257–268 (2009)
Hartley, R., Zisserman, A.: Multiple View Geometry in computer vision. Cambridge Press, Cambridge (2003)
Heikkilä, J.: Geometric camera calibration using circular control points. IEEE PAMI 22(10) (2000)
Kimura, M., Mochimary, M., Kanade, T.: Projector calibration using arbitrary planes and calibrated camera. In: CVPR (2007)
Okatani, T., Deguchi, K.: Autocalibration of a projector-camera system. IEEE PAMI 27(12) (2005)
Sadlo, F., Weyrich, T., Peikert, R., Gross, M.: A practical structured light acquisition system for point-based geometry and texture. In: Eurographics Symposium of Point-Based Graphics (2005)
Salvi, J., Fernandez, S., Pribanic, T., Llado, X.: A state of the art in structured light patterns for surface profilometry. Pattern Recognition 43, 2666–2680 (2010)
Shen, T.-S., Menq, C.-H.: Digital projector calibration for 3-D active vision systems. J. Manuf. Sci. Eng. 124(1) (2002)
Sun, W., Cooperstock, J.R.: An empirical evaluation of factors influencing camera calibration accuracy using three publicly available techniques. Machine Vision and Applications 17(1), 51–67 (2006)
Tao, J.: Slide projector calibration based on calibration of digital camera. In: SPIE, vol. 6788 (2007)
Tsai, R.Y.: A Versatile Camera Calibration Technique for High-Accuracy 3D Machine Vision Metrology Using Off-the-Shelf TV Cameras and Lenses. IEEE J. of Robotics and Automation 3(4) (1987)
Zhang, Z.: Flexible camera calibration by viewing a plane from unknown orientations. In: ICCV (1999)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Martynov, I., Kamarainen, JK., Lensu, L. (2011). Projector Calibration by “Inverse Camera Calibration”. In: Heyden, A., Kahl, F. (eds) Image Analysis. SCIA 2011. Lecture Notes in Computer Science, vol 6688. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-21227-7_50
Download citation
DOI: https://doi.org/10.1007/978-3-642-21227-7_50
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-21226-0
Online ISBN: 978-3-642-21227-7
eBook Packages: Computer ScienceComputer Science (R0)
