
Abstract
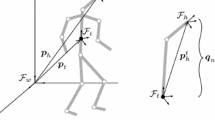
Odometry measurement is an important concept to update localization information, but is prone to error propagation. Still the method is widely applied to wheeled mobile robots since their motion is quite robust to random error such as slipping. While the concept of odometry can also be applied to humanoid robots the dynamically stable walking generation reinforces sliding motions resulting in unpredictable errors. Therefore this paper proposes a novel approach to measure these sliding errors with the help of optical sensors to either correct the odometry update or perform suitable actions to counteract the error.
Chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Kanda, T., Ishiguro, H., Imai, M., Ono, T.: Development and evaluation of interactive humanoid robots. Proceedings of the IEEE 92(11), 1839–1850 (2004)
Thrun, S., Burgard, W., Fox, D.: Probabilistic Robotics. MIT Press, Cambridge (2005)
Siegwart, R., Nourbakhsh, I.R.: Introduction to Autonomous Mobile Robots (Intelligent Robotics and Autonomous Agents). MIT Press, Cambridge (2004)
Borenstein, J., Feng, L., Borenstein, C.J.: Measurement and correction of systematic odometry errors in mobile robots. IEEE Transactions on Robotics and Automation 12, 869–880 (1996)
Vukobratovic, M., Borovac, B.: Zero-moment point – Thirty five years of its life. International Journal of Humanoid Robotics 1(1), 157–173 (2004)
Bonarini, A., Matteucci, M., Restelli, M.: Automatic error detection and reduction for an odometric sensor based on two optical mice. In: ICRA, pp. 1675–1680 (2005)
Czarnetzki, S., Kerner, S., Urbann, O.: Observer-based dynamic walking control for biped robots. Robotics and Autonomous Systems 57(8), 839–845 (2009); Humanoid Soccer Robots
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Czarnetzki, S., Hegele, M., Kerner, S. (2011). Odometry Correction for Humanoid Robots Using Optical Sensors. In: Ruiz-del-Solar, J., Chown, E., Plöger, P.G. (eds) RoboCup 2010: Robot Soccer World Cup XIV. RoboCup 2010. Lecture Notes in Computer Science(), vol 6556. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-20217-9_5
Download citation
DOI: https://doi.org/10.1007/978-3-642-20217-9_5
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-20216-2
Online ISBN: 978-3-642-20217-9
eBook Packages: Computer ScienceComputer Science (R0)