
Abstract
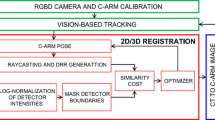
In prostate brachytherapy, transrectal ultrasound (TRUS) is used to visualize the anatomy, while implanted seeds can be seen in C-arm fluoroscopy. Intra-operative dosimetry optimization requires reconstruction of the implanted seeds from multiple C-arm fluoroscopy images, which in turn requires estimation of the C-arm poses. We estimate the pose of the C-arm by two-stage registration between the 2D fluoroscopy images to a 3D TRUS volume. As single-view 2D/3D registration tends to yield depth error, we first estimate the depth from multiple 2D fluoro images and input this to a single-view 2D/3D registration. A commercial phantom was implanted with seeds and imaged with TRUS and CT. Ground-truth registration was established between the two by radiographic fiducials. Synthetic ground-truth fluoro images were created from the CT volume and registered to the 3D TRUS. The average rotation and translation errors were 1.0° (STD=2.3°) and 0.7mm (STD=1.9 mm), respectively. In data from a human patient, the average rotation and lateral translation errors were 0.6° (STD=3.0°) and 1.5 mm (STD=2.8 mm), respectively, relative to the ground-truth established by a radiographic fiducial. Fully automated image-based C-arm pose estimation was demonstrated in prostate brachytherapy. Accuracy and robustness was excellent on phantom. Early result in human patient data appears clinically adequate.
Chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Jemal, A., Siegel, R., Ward, E., et al.: Cancer Statistics. Cancer J. Clin. 59(4), 225–249 (2009)
Nag, S., Ciezki, J.P., Cormack, R., et al.: Intraoperative planning and evaluation of permanent prostate brachytherapy: report of the American Brachytherapy Society. Int. J. Radiat. Oncol. Biol. Phys. 51(5), 1422–1430 (2001)
Westendorp, H., Hoekstra, C.J., van’t Riet, A., et al.: Intraoperative adaptive brachytherapy of iodine-125 prostate implants guided by C-arm cone-beam computed tomography-based dosimetry. Brachytherapy 6(4), 231–237 (2007)
Su, Y., Davis, B.J., Furutani, K.M., et al.: Seed localization and TRUS- fluoroscopy fusion for intraoperative prostate brachytherapy dosimetry. Computer Aided Surgery 12(1), 25–34 (2007)
Jain, A.K., Deguet, A., Iordachita, I., et al.: Intra-operative Guidance in Prostate Brachytherapy Using an Average Carm. In: Ayache, N., Ourselin, S., Maeder, A. (eds.) MICCAI 2007, Part II. LNCS, vol. 4792, pp. 9–16. Springer, Heidelberg (2007)
Yamazaki, T., Watanabe, T., Nakajima, Y., et al.: Improvement of depth position in 2d/3d registration of knee implants using single-plane fluoroscopy. IEEE Transactions on Medical Imaging 23(5), 602–612 (2004)
Livyatan, H., Yaniv, Z., Joskowicz, L.: Gradient-based 2-D/3-D rigid registration of fluoroscopic X-ray to CT. IEEE Trans. Med. Imaging 22, 1395–1406 (2003)
Mahfouz, M., Hoff, W., Komistek, R., Dennis, D.: A robust method for registration of three-dimensional knee implant models to two-dimensional fluoroscopy images. IEEE Transactions on Medical Imaging 22, 1561–1574 (2003)
Lau, K., Chung, A.: A global optimization strategy for 3d-2d registration of vascular images. In: Proceedings of 17th British Machine Vision Conference, pp. 489–498 (2006)
Hummel, J., Figl, M., Bax, M., Bergmann, H., Birkfellner, W.: 2D/3D registration of endoscopic ultrasound to CT volume data. Physics in Medicine and Biology 53(16), 4303–4316 (2008)
Leung, K.Y.: Registration of 2D cardiac images to real-time 3D ultrasound volumes for 3D stress echocardiography. In: SPIE Medical Imaging, vol. 6144, pp. 405–416 (2006)
Jain, A., Fichtinger, G.: C-arm Tracking and Reconstruction without an External Tracker. In: Larsen, R., Nielsen, M., Sporring, J. (eds.) MICCAI 2006. LNCS, vol. 4190, pp. 494–502. Springer, Heidelberg (2006)
Arnold, D.V., Brauer, D.: Local performance of the (1 + 1)-ES in a noisy environment. IEEE Transactions on evolutionary computation 6(1), 30–41 (2002)
Jain, A., Kon, R., Zhou, Y., Fichtinger, G.: C-arm calibration - is it really necessary? In: Duncan, J.S., Gerig, G. (eds.) MICCAI 2005. LNCS, vol. 3749, pp. 639–646. Springer, Heidelberg (2005)
Orio, P.F., Tutar, I.B., Narayanan, S., et al.: Intraoperative ultrasound-fluoroscopy fusion can enhance prostate brachytherapy quality. Int. J. Radiat. Oncol. Biol. Phys. 69(1), 302–307 (2007)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2010 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Fallavollita, P., Burdette, C., Song, D., Abolmaesumi, P., Fichtinger, G. (2010). C-arm Pose Estimation in Prostate Brachytherapy by Registration to Ultrasound . In: Jiang, T., Navab, N., Pluim, J.P.W., Viergever, M.A. (eds) Medical Image Computing and Computer-Assisted Intervention – MICCAI 2010. MICCAI 2010. Lecture Notes in Computer Science, vol 6363. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-15711-0_39
Download citation
DOI: https://doi.org/10.1007/978-3-642-15711-0_39
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-15710-3
Online ISBN: 978-3-642-15711-0
eBook Packages: Computer ScienceComputer Science (R0)