
Abstract
Within today’s environment of relentless urban growth, socio-technical approaches towards enhancing wellbeing within the urban have started gathering momentum. Situated in this context, the research paper presents an approach to actively instigate physiological and psychological behavioral change within people for promoting wellbeing via context aware augmentation of physical environments. This involves harnessing a trans-disciplinary approach wherein, the domains of data sciences, HCI, embedded robotics, computational simulation and user-centric interaction design merge in order to promote real-time responsive augmentation (physical, ambient, social and structural) of the built environment. The paper elaborates upon two projects: RoboZoo and FLUID, both built and tested in The Netherlands, representing two different scales; Small scale: object/product scale, which operate within urban open public space and Large scale: indoor public installation.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
1.1 Underpinning
The unprecedented pace, with which urbanization is advancing, is principally driving the emergence of Smart Cities on a global scale [1]. A predictive urban growth of 1.84% per year between 2015 and 2020 alone, mapped by Global Health Observatory data [2], already outlines the challenges facing the built environment community. Within this fast-paced demand of urban growth, mostly led by developer led commercial lobbies, issues pertaining to urban health and wellbeing at the urban planning phase appear secondary on the agenda. It is thus critical to explore strategies for re-furbishing and re-purposing the urban environment so that it may proactively reduce health risks and promote wellbeing. Fostering user awareness pertaining to healthy practices, promoting physical mobility and increasing user engagement in community drives for promoting wellbeing via socio-technical mediations within the urban context are all deemed as vital proactive measures.
Within this context, the research paper presents an approach where context aware augmentation of physical environments by harnessing the domains of social robotics and human computer interaction to actively instigate physiological activity and social wellbeing is deployed. The approach involves incorporating a fusion of an interdisciplinary approach (spatial sciences, social science, human physiology and human behavior) and an intra-disciplinary approach (data sciences, robotics, computational design and human-machine interaction) to promote real-time multi-scalar adaptation (physical, ambient, social and structural) in the built environment. Binding People, Technology and Space into a comprehensive inter-activating looped system to enhance health and wellbeing within the contemporary city is thus a vital characteristic of the elaborated project.
The paper, in order to elaborate upon this approach, is organized in the following sections: Sect. 1.2, will lay the foundation of health and wellbeing within the urban context via a concise literature review, Sect. 1.3, shall dive into the domain of social robotics, its connection with human computer interaction, Sect. 2 and its sub-sections shall elaborate upon the two real-time interactive physical installations: RoboZoo and FLUID, and Sect. 3 shall conclude by engaging in a discussion on the findings of the experiments and the future research work which needs to be conducted within the domains of social robotics and HCI.
1.2 Wellbeing Within an Urban Context
As earlier efforts towards the examination of the philosophical roots of wellbeing and its interpretations among different disciplines have shown, the formulation of a single definition of the term that captures the full spectrum of wellbeing has proved to be an incredibly difficult task. This difficulty stems from the broad and undefined nature of the term, a fact that becomes particularly apparent throughout the varying linguistic interpretations of the term comes forth in non-English-speaking countries, complicating the conduction of comparative research and the formulation of context-aware health policies [3]. Due to this confusion, wellbeing is conceptualized as a term considered to be interchangeable with other terms of equally broad and undefined nature, such as ‘quality of life’, and it has been widely used as such [3,4,5].
Three major dimensions have been most commonly associated with wellbeing, the physiological, psychological and social dimension, and in the majority of the studies within fields such as sociology, anthropology and economics, wellbeing is examined in connection to the attribute mostly associated with the field [4]. In the field of biomedicine, wellbeing is commonly discussed in relation to physiological functioning, while psychologists associate wellbeing with a sense of self and interpersonal connectedness [5]. As for its assessment, while morbidity and mortality become the objective components measured in indicators commonly used by health policy makers, in recent literature there is also reference to the difficulty to integrate self-assessed elements and dimensions of subjective wellbeing in the assessment process [3]. Earlier efforts towards the creation of the assessment tools such as that of Kaplan [3] attempted to encompass both the physical and social dimension in a single tool, while other tools such as the Psychological General Well-Being Index [7] have focused on the measurement of a single dimension. A significant step towards that was the development of the WHO-5 Well-Being Index as a generic tool for the subjective measurement of wellbeing, applicable to different age groups and able to capture improvement of wellbeing over time without overlapping with significant disease-related symptoms [8].
Since wellbeing is a term with such a multifaceted nature, it is critical for studies that undertake the task of enhancing wellbeing, to define which of its dimensions are explored within the scope of the study. The focus of this paper will be on discussing technology mediated social and physiological wellbeing, by exemplifying upon two projects. The two projects RoboZoo and FLUID, also operate on two different scales within the urban domain: an object/product scale and an architectural installation scale and thus have different socio-technical approaches towards approaching the topic of wellbeing.
Furthermore, a fact that has emerged in recent literature is the shift from the approach that viewed the absence of psychological or physiological dysfunction as the primary indicator of wellbeing, towards an approach that views wellbeing as a positive multifaceted attribute [3, 4]. Following this shift, the focus of the study is on positive functioning, and how public interactive spaces and social interactive robots can act towards its advancement in the physiological and social domain.
1.3 Social Robotics and HCI in the Urban Sphere
Public interactive installations, such as the Tactical Sound Garden by Mark Sheppard and Dotty Tate by Jason Bruges Studio [9] commonly incorporate smart technologies which can enhance the sensorial experience of places and stimulate physical activity; despite this fact, there is little to no literature examining public interactive spaces through the lens of wellbeing. Single dimensions of wellbeing, such as social functioning, are addressed more intensively is Social Robotics; the impacts of interacting with social robots have been studied in environments ranging from elderly nursing homes to educational facilities, work environments and public spaces [10]. Within the larger field of Social Robotics, Assistive Robotics (AR), Social Interactive Robotics (SIR) and Social Assistive Robotics (SAR) have emerged as subclasses, defined by a robot’s main purpose to give aid, engage in some form of interaction or interact with the aim to provide assistance [11].
The subclass Social Assistive Robotics (SAR) has been particularly productive in terms of enhancing physiological wellbeing, with its most notable contributions belonging in the field of physical therapy, therapeutic play or post-stroke rehabilitation exercises, where the robotic assistant plays a motivational or instructive role [12]. Certain aspects of physiological wellbeing, such as physical activity, have been also addressed indirectly in studies with a focus in the assessment of social interaction between robots and humans; such a case is the study on the sociopsychological effects of living with therapeutic robots in an elderly care facility [13] that, among other metrics, measured the time spent in public spaces as a performance indicator.
As for the contribution of Social Robotics towards the enhancement of social wellbeing, research conducted towards the promotion of social interaction in the elderly and individuals with cognitive disorders is particularly noteworthy; significant research has been carried out towards the development of companion robots for the reduction of stress and depression in the elderly, as well as for therapeutic purposes for children with autism [10]. The emergence of robotic pets as companions has been mostly connected with this field, as a way to harvest the benefits of animal assisted therapy, but without the constant care that an animal would require [10, 13, 14]. While such studies explore social interaction scenarios as therapeutic interventions towards the treatment of physiological and psychological dysfunctions, a number of studies also explore the enhancement of positive functioning via social interaction. Such a case is that of Cooney et al. [15] that explored the enhancement of social wellbeing through affectionate play, via interaction with a small companion robot.
For social robots deployed in public space, as happens with the two projects that will be further discussed, advanced adaptability as well as response to unexpected scenarios is required [10], while the range of the users expands considerably and the robot has to be capable of interacting with more than one human. Additionally, in the wider field of HCI, other social aspects that technology mediated interaction in public spaces can bring forth have also surfaced lately within the discourse on urban HCI; since one or multiple users can be involved in interaction scenarios within the public space, the public realm becomes a space for people to share creative experiences [16, 17]. With the introduction of user-controlled interactive elements, public spaces become realms where technology enhances the social agency of the users by enabling them to manipulate the barriers between public and private space and negotiate their desired degree of social interaction [18].
2 Urban Social Robotics Experiments
The aforementioned discussion on social robotics and HCI serves as a rich context for embedding the research experiments. The two projects that will be further discussed in this paper examine how social robotics and HCI driven urban interactive interventions can act as potential enhancers of physiological health and mental wellbeing. The projects represent two different scales; Small scale Object/Product oriented, which operate within Urban open public space and Large scale indoor public Installations. Both projects bind critical performative demands imposed by the clients, the solution sets for which involve impacting human behavior through tangible interaction. The projects have been prototyped, experimented and tested in The Netherlands and Spain, and serve as proof of concepts of a trans-disciplinary mode of operation.
-
a.
RoboZoo, Real-time interactive bots in urban public spaces (Fig. 1(a))
Fig. 1. 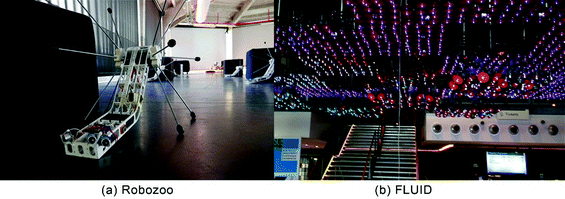
(a): RoboZoo, an ecology of small-scale mobile bots. (b): FLUID, a large scale indoor public installation designed for the NEMO Science Museum in Amsterdam.
-
b.
FLUID, Real-time interactive public installation at Science Museum, Amsterdam (Fig. 2(b))
Fig. 2. 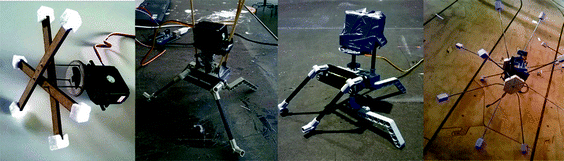
From left to right: progression of the iterations of RoboZoo according to user feedback.


2.1 RoboZoo: Real-Time Interactive Bots in Urban Public Spaces
RoboZoo is an experiment in social robotics consisting of an ecology of small scale robotic-bots which, operate on the premise that motion/movement and non-verbal communication can be understood as interfaces of emotional interaction and cognition. The installation harnesses swarm computing and ubiquitous computing tools and techniques to develop real-time data communication abilities per robotic bot and amongst a community of these bots and their human counterparts. An important aspect of RoboZoo is the subtle transition from a reactive to a pro-active mode of engagement with its users.
With a focus on challenging conventional modes of perception, movement and associated behavioral attributes, the installation operates on the boundaries of science, art and architecture. The client, in this case was the European Union. The RoboZoo installation was developed as a part of a European Union Culture grant, titled METABODY. The research agenda in this case was set towards enhancing physiological response as well as psychological comfort, for instance via offering a mode of companionship. Based on the planned public exhibition locations and urban open environments for exposing RoboZoo, our target audience, apart from the regular visitors of the exhibition, comprised of pre-teenage children (below 10 years) and the elderly who tend to suffer from loneliness. A variety of techno-centric experiments (such as the ones dealing with Ambient Intelligence) have a tendency to be situated in discrete structured environments. A disadvantage of this tendency is that the functional scope of such solutions does not extend beyond their deployment domain. RoboZoo on the other hand is developed as an installation which operates both, within urban open spaces and within controlled home environments. The socio-technical aspect of the installation implied at critically examining the manner in which the divide between humans and machines can be blurred to an extent where aspects of empathy and shared emotional agency become emergent consequences of interactions between the two. Instigating a healthier community engagement, as a critical aspect of wellbeing in urban public spaces via actively merging human and machinic agencies, wherein ambiguity and diffused affordances take center stage, thus provoking pro-active engagements for creating new social structures became a primary objective of RoboZoo.
RoboZoo, as an interactive swarm of robots is conceived as an ecology of small-scale mobile bots, which, operate on the basis of a multi-agent swarm computing model. The design evolution of the bots in itself went through a series of iterations. This primarily focused on the morphology of the bots rather than the communication protocols between them at the primary stage. The form factor, including the material usage, the scale and size of the bots as well as the nature of their movement, was intensively tested within a research lab setting, where both children and elderly were invited regularly for commenting and criticizing the developmental phase. The bots, due to their mobile nature, were always compared with an animal form, however, their morphological makeup and their mobility aspects were directly perceived from an emotive angle. For instance, the first few iterations were conceived as being nervous, too frantic, scary as well as too insect like. The material make up in this case too was perceived as too sharp, very angular, very stiff or too flexible (Fig. 2). Such feedback from the users within a controlled setting was further coupled with technical issues being encountered by the design team while deploying the early phase prototypes in an urban open space. For instance, the friction between rough ground and the ability to propel itself as well as change direction effortlessly, became issues which were coupled together with the aforementioned emotional response.
The final iteration (Fig. 3), acquired the form of a slender grasshopper like body structure with two wheels fabricated from bent metal spokes with rubber endings. The body in itself is made out of simple to fabricate, 3d printed profiles, which also host a range of electronics. Each bot operates as an individual agent, with embedded proximity sensors (located prominently as eyes), a micro-controller (located at the heart’s position), LED strips (embedded within the 3d printed chassis) and two servo motors (connected with the two wheels), powered by a battery pack. The scale factor was also maintained in a manner that the bot does not become imposing and could be easily lifted up and spatially re-positioned even by small children. Hopping motion vs a smoother wheel based locomotion further helped both technically as well as from an emotional response perspective since the users now expressed a sense of familiarity accompanied with lesser skepticism about the directional movement and intensity of movement of the bots. The LED lighting and its subtle communication such as Red for appearing confused, Green as having registered the presence of a person and Blue for representing a calm state were also equally understood and welcomed as an additional feature by both age groups. Each agent is further programmed with control rules (akin to a swarm) which enables it to sense its context (people and obstacles), sense the speed of movement/approach of people as well as other agents towards it and thus propel itself towards people (based on how they approach: gentle movement equates to a friendly approach vs sudden and rapid movement equates to an unfriendly, imposing approach), while maintaining contact with other agents in its vicinity.

Final iterations of RoboZoo, deployed at an indoor and outdoor environment. (Color figure online)
RoboZoo, was ultimately deployed at two large scale public events within two prominent indoor exhibition areas: The Media Lab Prado, Madrid, Spain as well as at AULA, Congress centrum at the TU Delft, Netherlands. Apart from this, the ecology of bots was also deployed at various outdoor locations within the TU Delft: during a major open to public science event frequented by children and elderly alike as well as in an outdoor setting at one of the most frequented pubs at the Faculty of Architecture, TU Delft (Fig. 4). An observational analysis approach, accompanied with informal interview sessions with the users at the aforementioned events resulted in the following conclusions: The bots and humans inter-activate each other in order to create novel social patterns and in the process constantly redefine space via establishing unspoken ecological dependencies. Movement (speed, directionality and pause) based expression of each independent agent evokes instantaneous response in the environment and invites people (who are otherwise organized in clusters/ghettoes) to create dynamic relations on the fly. A special focus was given towards the elderly and children who were interacting with the bots during the public events.

Deployment of RoboZoo in Madrid (upper left and bottom left image) and Delft (upper right and bottom right image)
A rather comforting observation, which was reinforced with the informal interview sessions with the elderly suggested that they did not perceive the bots as machines, but looked at them as pets and some were even willing to name them and take them home. The fact that some of elderly even went out of their way to pick up and re-position the bots which were stuck or were being mishandled by the younger visitors of the public exhibitions was in itself a testament of them developing an emotional and caring attitude towards RoboZoo. It was also observed by the RoboZoo team that though the electronics were exposed through the framework of the bots, the elderly did not show any signs of fear, however, some suggestions of covering these and adding a top cover module with a softer feel to it were also made. Physical activity such as bending, increased walking and stretching as well as multi-generational engagement were observed as common characteristics shared by both elderly and children. Children, specially were observed to be highly engaged with RoboZoo. However, frantic and rapid movement by children were at times not registered as inviting gestures by the bots. Children around the age of 5 to 7 were particularly involved with the bots. They were not only involved in physically playing with the bot but were surprisingly interested in how the bots were made and how they communicated with them as well as the other bots. A definite increase in physiological activity in addition to mental engagement was observed.
An active alteration of behaviors via shared agency thus starts becoming the norm. This mutual communication between people and bots actuate spatial (manner in which space is used) and social reconfiguration, thus promoting wellbeing via physical and psychological activeness.
2.2 FLUID: Real-Time Interactive Public Installation
FLUID, takes a different take on social robotics and HCI at an architectural scale. The installation thus instead of acquiring an object/product scale like RoboZoo, which operates at an emergent real-time interaction mode, operates at a one to one interaction level with the users. FLUID, also differs in another manner, it only operates within an indoor setting/in a controlled environment and is a social interaction experiment which addresses a specific client demand.
FLUID is a commercial project commissioned by the NEMO Science Museum in Amsterdam, The Netherlands. Some critical issues raised by NEMO specifically pointed towards solving two operative issues with one solution: reduce the amount of effort and resources spent on hiring staff to help reduce the noise in the entrance lobby created by a huge number of school going children who visit the museum, while at the same time keeping them physically active and allow for parents to be focused and organized while purchasing tickets and collecting information from the NEMO staff. This translated into the following research tasks for the FLUID design team: altering user behavior to reduce noise made by kids visiting the museum either via active or passive modes of interaction, inculcating behavioral change in the users to make them self-organized and engaged while waiting in the entrance hall and the active enhancement of pro-active physical activity via physically engaging users (both kids and adults).
As a response, FLUID is conceived as an installation which is suspended from the ceiling of the entrance hall of NEMO. FLUID takes its inspiration from a natural phenomenon: wind flow and the manner in which directionality of wind flow affects objects such as trees etc. to create dynamic fields of flow. Directional swaying of trees, movement of leaves due to the wind force etc. are some examples of such dynamic flows. FLUID aims to reimagine such dynamic flow patterns via replicating natural forces like the wind with the tracked movement pattern of visitors. Interfacing these tracked patterns of visitor movements with integrating embedded robotics and ambient media in a comprehensive manner, FLUID converts an otherwise static assemblage of objects into a dynamic fluid landscape via the physical augmentation of its system components. FLUID thus involves an active interaction approach where the unison of user behavior and mechanic operations are united into one seamlessly.
FLUID went through multiple iterations during the design development phase, which articulated the artistic vision in multiple ways from data communication as well as the physical components constituting it. One of the most prominent ideas, which was further refined into the final version, incorporated linear aluminum sheet based strips, which would run the entire length of the entrance hall and were directly connected to a series of electronic pistons suspended from the ceiling. A camera based tracking system, which would track and interpolate the position of users under this so called false ceiling would then act as a trigger for pushing the flexible aluminum strips on top of the aggregated cluster of users, thus transforming the otherwise static form of the ceiling. However, after discussing the idea with multiple stakeholders, including NEMO personnel, groups of children as well as their parents, the design team arrived at a conclusion that this mode of physical augmentation still did not capture the directional wind-flow based distortion of a physical collection of objects but instead rather projected a heavy, and rather linear cross sectioning of air-space, which lacked a higher resolution of interaction and promoted feelings of fear, anxiety and lack of self-control.
The design team thus came up with a much more refined alternative to address this user feedback and developed a much more fragmented (subdivided clusters of interactive modules instead of the linear strip idea), fragile (in appearance) and location sensitive (with inbuilt sensing systems per interactive module) proposal.
This new articulation of FLUID consists of 40 self-similar ornamental clusters made up of hollow aluminum pipes (Fig. 5(a)), which serve as a host for all the electrical wiring, microcontrollers and external physical elements. Each cluster is populated with the following system components: 4 microcontrollers (Arduino boards), 4 ultrasonic sensors, 4 custom made PCB’s, which control 256 RGB LED’s, 16 computer fans (which directly impart variable air pressure to tilt 256 pivoted CD’s, which are painted an orange color on one side only) and 1 electronic piston (which vertically displaces the cluster) (Fig. 5(b) and (c)). The installation runs on an inter-integrated circuit protocol (I2C) and addresses user behavior by an intricate tracking of the visitor’s directionality of movement and the amount of time they spend below each cluster via its embedded sensors (Fig. 7). The 40 clusters are divided into 4 groups and each group’s microcontrollers in turn have a master controller (Arduino) attached to another custom made PCB. These master controllers are directly responsible for controlling the movement of electronic pistons connected to each interactive cluster within the group which they are in charge of (Fig. 6(b)).

(a): Setting up the construction of each cluster by passing the wiring through the hollow pipes. (b): Individual sensor testing after the construction of each cluster. (c): Four clusters are connected in order to formulate a supercluster. (Color figure online)

(a): The computer fans and the LED’s are actuated by tracking the movement below each supercluster. (b): On-site configuration of the movement of the electronic pistons. (c): Testing the movement of the hinged disks before the official launch of the installation (Color figure online)

Left: Exploded view of the clusters and cluster-to-supercluster assembly. Right: FLUID interacting with the audience within NEMO Science Museum
The directional movement of the children and other visitors is communicated via triggering the fans (Fig. 6(b)) on directly above the tracked location of the visitor (accompanied with a change in the LED color as an added indicator of recognition and physical movement of the interactive cluster). This switching on of the fans makes the hinged disks (Fig. 6(c)), with their orange color exposed to the users, tilt instantly (revealing a different color: the silver colored data reading and writing side) and then regain their horizontal position gradually once the fan slows down to eventually switch off. The visitors are instantly drawn towards this self-impacted dynamic color pattern configurations and are able to easily register that these are produced due to their own movement below the installation. Children, specifically are triggered into a gameplay scenario where they are focused towards producing colored patterns and propagating these patterns by physically moving below the installation. A rapid increase in step count and social interaction amongst the children was witnessed.
Furthermore, each cluster is able to detect the time spent by the visitor under it (a timer which would register the presence of the same person below the cluster for a minimum of seven seconds) and accordingly triggers the attached actuator to vertically push the cluster down towards the visitor, also accompanied by a corresponding change of the LED color and fan speeds. This physical displacement (vertical) of the cluster towards the user is specifically captivating to the user standing below since it gave an expression as if the installation wants to approach and embrace the user. An immediate observed reaction of the visitors, especially children is to reach out for the clusters accompanied by a jumping action with outstretched arms as well as occasional squatting and jumping actions. Apart from this, an independent self-organized structural behavior akin to playing a choreographed game thus started emerging amongst the children visiting the Museum, resulting in pro-active physical engagement and the reduction of noise owing to their self-organized behavior. A result of this engagement of the children in active gameplay is a lower supervision by the staff deployed on ground to cater to unruly and often noisy user behavior of the children. Once the children were engaged in gameplay within the safe confines of the entrance hall and below the virtual boundary of the installation, their parents tendency to be more relaxed and stress free allowed them to be more focused on tasks such as buying tickets for the entry into the museum as well be more focused while gathering information from the NEMO staff. It was also observed that when the parents were not engaged in such tasks, they were involved with the children in activities such as trying to decipher how the installation works or else trying to organize them below the installation in order to trigger one of the two behaviors of FLUID. Apart from these two behaviors of the installations, if the system detects multiple sensors being triggered (more than 70%) or if it detects inactivity in the entrance hall, an automated three dimensional pattern formation from the interactive clusters is set in motion. This involves triggering the vertical displacement of the clusters in multiple pre-programmed patterns, accompanied by the fans switching on and the LED’s changing their colors.
Overall, the ornamental character of FLUID coupled with its simple yet effective behavioral communication modes as well as its scale, which allowed for an immersive experience addressed the issues raised by the Museum and more importantly engaged the audience both physiologically and psychologically via promoting pro-active behavior in real-time.
3 Conclusions and Future Research
The paper outlines the role of social robotics within the urban environment via two real-world experiments. Apart from elaborating upon the socio-technical nature of these experiments, the paper also reports upon the findings of both observational analysis and informal interview outcomes. The two projects, operating at different scales, adhere to the brief presented to the design team by the clients (European Union and NEMO) while at the same time strategically derive solutions that adhere to enhancing physiological activity and mental wellbeing in both children and the adults alike. Different modes of activating children to engage in physical activity were initiated (scale dependent). These range from inculcating a pet like behavior via RoboZoo and thus enhancing activities such as running, bending, squatting and following as opposed to an embracing/reaching out gesture promoted by FLUID, which instinctively activate reactions such as reaching out with arms outstretched, jumping, and focused physical movement in order to trigger color changes. Besides this, both installations enhanced mental engagement within children and the elderly alike. This was apparent during group formation and social engagement and interaction activities that materialized while being engaged with both social robotics experiments. RoboZoo however, was especially enticing for the elderly since they developed empathy towards the bots owing to the anthropomorphic embodiment and the tangible interaction they promoted. The higher rates of social connectedness that were identified in this user group might be associated with higher rates of loneliness that are usually demonstrated in the elderly, which as it has been reported, increase the chances of human-like properties to be attributed to non-human agents [19]. Another vital characteristic difference, dealt with the emergent behavior, which, RoboZoo inherits owing to the swarm robotics principles applied within the project. This implies that the bots not only established interactions with the users but at the same time were constantly interacting with each other in terms of the distance that they maintain between themselves and the manner in which they would propel towards each other upon spotting each other. The role of agency of the social robot in this case thus moved beyond displaying an Individualistic to a more Group oriented interaction.
Looking back at the literature review, it is noteworthy that, in the past, discussions on social robotics positioned social robots as agents that can be seen as a part of a larger heterogeneous group, while having a distinguished “individual social” agency and behavioral attributes, in contrast to the “group social” behavior that a member of a multi-agent robotic formation would have [20]. Currently, combined research in swarm intelligence and collective robotics tends to be more focused on task-specific applications, such as robot-assisted search-and-rescue response scenarios [21], or object manipulation [22]. Our study however suggests that there is potential in working with swarm robotics for the case of social interaction and thus be able to impact aspects of physical health and mental wellbeing.
A vital question for future research by the authors can be formulated as follows: Could a multi-robot scenario (in contrast to a scenario with a single robotic agent) increase the perceived social agency of the robot? This research question also stems from the observations of Alac et al., which suggest, that the social agency of the robot is not a mere product of its programming but is also largely dependent on the multimodal interactions between the humans that are engaging with the robot. In their study towards the identification of features that determine the social agency of a robot, it was found that the moment that a human addressed a robot as a being with assumed social intelligence and engaged in conversation with it, the chances of other humans interacting with it increased significantly [23].
While models of multimodal interaction have been explored within Social Robotics applications, such models commonly include one robot and multiple humans. It would be of interest to investigate how the social agency of the robot would be influenced in the case that another robot enters the multimodal interaction scenario; further experimentations with RoboZoo could implement an investigation towards this direction, in order to determine if the perceived social agency of the robotic agents in a multi-robot scenario is influenced by the fact that, apart from interacting with other humans, the robots are also seen interacting with each other.
Besides this, the quantification of observed interactions in terms of interaction time, degree of engagement and attention span etc. would certainly be among the next steps for both research projects. Longitudinal studies of social robots interacting with humans show that the novelty effect often wears off quickly and humans lose their initial interest in the robot [10]. It would thus be of interest to investigate if multimodal interaction including multiple robots interacting with each other would assist in retaining their initial interest owing to the emergent behavior that they embody. Both spatial (FLUID), Interactive and Assistive modes of engagements and the impact of scalar variations should thus be examined and enriched further. Finally, further studies in enhancing perceptual capabilities to increase the robot’s awareness of social cues coupled with research in terms of morphological and behavioral attributes of the experiments would highly benefit the manner in which we envision the research to progress.
References
Solanas, A., Patsakis, C., Conti, M., Vlachos, I., Ramos, V., Falcone, F., Postolache, O., Pérez-Martínez, P., Di Pietro, R., Perrea, D., Martínez-Ballesté, A.: Smart health: a context-aware health paradigm within smart cities. IEEE Commun. Mag. 52(8), 74–81 (2014). https://doi.org/10.1109/MCOM.2014.6871673
WHO Homepage. http://www.who.int/gho/urban_health/situation_trends/urban_population_growth_text/en/. Accessed 6 Feb 2018
Fleuret, S., Atkinson, S.: Wellbeing, health and geography: a critical review and research agenda. NZ Geogr. 63(2), 106–118 (2007). https://doi.org/10.1111/j.1745-7939.2007.00093.x
Dodge, R., Daly, A., Huyton, J., Sanders, L.: The challenge of defining wellbeing. Int. J. Wellbeing 2(3), 222–235 (2012). https://doi.org/10.5502/ijw.v2i3.4
Cronin de Chavez, A., Backett-Milburn, K., Parry, O., Platt, S.: Understanding and researching wellbeing: its usage in different disciplines and potential for health research and health promotion. Health Educ. J. 64(1), 70–87 (2005). https://doi.org/10.1177/001789690506400108
Kaplan, R.M., Bush, J.W., Berry, C.: Health status: types of validity and the index of well-being. Health Serv. Res. 11(4), 478–507 (1976)
Grossi, E., Groth, N., Mosconi, P., Cerutti, R., Pace, F., Compare, A., Apolone, G.: Development and validation of the short version of the psychological general well-being index (PGWB-S). Health Qual. Life Outcomes 4(1), 88 (2006). https://doi.org/10.4172/2167-7182.1000412
Winther Topp, C., Østergaard, S.D., Søndergaard, S.: The WHO-5 well-being index: a systematic review of the literature. Psychother. Psychosom. 84(3), 167–176 (2015). https://doi.org/10.1159/000376585
Haque, U.: Distinguishing concepts: lexicons of interactive art and architecture. Archit. Des. 75(1), 24–31 (2005)
Leite, I., Martinho, C., Paiva, A.: Social robots for long-term interaction: a survey. Int. J. Soc. Robot. 5(2), 291–308 (2013). https://doi.org/10.1007/s12369-013-0178-y
Feil-Seifer, D., Mataric, M.J.: Defining socially assistive robotics. In: 9th International Conference on Rehabilitation Robotics (ICORR 2005), pp. 465–468 (2005). https://doi.org/10.1109/icorr.2005.1501143
García-Vergara, S., Brown, L., Park, H.W., Howard, A.M.: Engaging children in play therapy: the coupling of virtual reality games with social robotics. In: Brooks, A.L., Brahnam, S., Jain, L.C. (eds.) Technologies of Inclusive Well-Being. SCI, vol. 536, pp. 139–163. Springer, Heidelberg (2014). https://doi.org/10.1007/978-3-642-45432-5_8
Wada, K., Shibata, T.: Living with seal robots-its sociopsychological and physiological influences on the elderly at a care house. IEEE Trans. Rob. 23(5), 972–980 (2007). https://doi.org/10.1109/TRO.2007.906261
Kidd, C.D., Taggart W., Turkle, S.: A sociable robot to encourage social interaction among the elderly. In: Proceedings of the 2006 IEEE International Conference on Robotics and Automation, pp. 3972–3976. IEEE, Orlando (2006)
Cooney, M.D., Nishio, S., Ishiguro, H.: Designing robots for well-being: theoretical background and visual scenes of affectionate play with a small humanoid robot. Lovotics 1, 1–9 (2014). https://doi.org/10.4172/2090-9888.1000101
Fischer, P.T., Hornecker, E.: Urban HCI-interaction patterns in the built environment. In: Proceedings of the 25th BCS Conference on Human-Computer Interaction, pp. 531–534. Newcastle-upon-Tyne (2011)
Kuikkaniemi, K., Jacucci, G., Turpeinen, M., Hoggan, E., Müller, J.: From space to stage: how interactive screens will change urban life. Computer 44(6), 40–47 (2011). https://doi.org/10.1109/MC.2011.135
Kostakos, V., O’Neill, E., Penn, A.: Designing urban pervasive systems. Computer 39(9), 52–59 (2006)
Epley, N., Waytz, A., Cacioppo, J.T.: On seeing human: a three-factor theory of anthropomorphism. Psychol. Rev. 114(4), 864–886 (2007). https://doi.org/10.1037/0033-295x.114.4.864
Fong, T., Nourbakhsh, I., Dautenhahn, K.: A survey of socially interactive robots. Robot. Auton. Syst. 42(3–4), 143–166 (2003). https://doi.org/10.1016/S0921-8890(02)00372-X
Liu, Y., Nejat, G.: Multirobot cooperative learning for semiautonomous control in urban search and rescue applications. J. Field Robot. 33(4), 512–536 (2016). https://doi.org/10.1002/rob.21597
Song, P., Kumar, V.: A potential field based approach to multi-robot manipulation. In: Proceedings of the 2002 IEEE International Conference on Robotics and Automation, pp. 1217–1222. IEEE, Washington, DC (2002). https://doi.org/10.1109/robot.2002.1014709
Alac, M., Movellan, J., Tanaka, F.: When a robot is social: spatial arrangements and multimodal semiotic engagement in the practice of social robotics. Soc. Stud. Sci. 41(6), 893–926 (2011). https://doi.org/10.1177/0306312711420565
Acknowledgements
We would specially like to thank the research and design team members involved in the RoboZoo and FLUID projects: Javid Jooshesh, Veronika, Laszlo, Ricardo Galli, Chrysostomos Tsaprailis, Leslie Che, Jiarui Sun, Yağız Söylev, Tanya Somova, Nick van Dorp, Hua Fan, Y. Lyu, Danny Cheng, R. Chheda. Additionally we would like to thank the European Union Culture Grant as well as NEMO for providing us with the opportunity and for funding the two social robotics and HCI based projects.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Biloria, N., Dritsa, D. (2018). Social Robotics and Human Computer Interaction for Promoting Wellbeing in the Contemporary City. In: Kurosu, M. (eds) Human-Computer Interaction. Interaction in Context. HCI 2018. Lecture Notes in Computer Science(), vol 10902. Springer, Cham. https://doi.org/10.1007/978-3-319-91244-8_10
Download citation
DOI: https://doi.org/10.1007/978-3-319-91244-8_10
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-91243-1
Online ISBN: 978-3-319-91244-8
eBook Packages: Computer ScienceComputer Science (R0)