
Abstract
The linear phenotypic selection index (LPSI), the null restricted LPSI (RLPSI), and the predetermined proportional gains LPSI (PPG-LPSI) are the main phenotypic selection indices used to predict the net genetic merit and select parents for the next selection cycle. The LPSI is an unrestricted index, whereas the RLPSI and the PPG-LPSI allow restrictions equal to zero and predetermined proportional gain restrictions respectively to be imposed on the expected genetic gain values of the trait to make some traits change their mean values based on a predetermined level while the rest of the trait means remain without restrictions. One additional restricted index is the desired gains LPSI (DG-LPSI), which does not require economic weights and, in a similar manner to the PPG-LPSI, allows restrictions to be imposed on the expected genetic gain values of the trait to make some traits change their mean values based on a predetermined level. The aims of RLPSI and PPG-LPSI are to maximize the selection response, the expected genetic gains per trait, and provide the breeder with an objective rule for evaluating and selecting parents for the next selection cycle based on several traits. This chapter describes the theory and practice of the RLPSI, PPG-LPSI, and DG-LPSI. We show that the PPG-LPSI is the most general index and includes the LPSI and the RLPSI as particular cases. Finally, we describe the DG-LPSI as a modification of the PPG-LPSI. We illustrate the theoretical results of all the indices using real and simulated data.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others
Keywords
- Null Restrictions
- Selection Cycle
- Estimated Selection Response
- Economic Weight
- Estimated Correlation Value
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
3.1 The Null Restricted Linear Phenotypic Selection Index
Conditions to construct a valid null restricted linear phenotypic selection index (RLPSI) are the same as those described in Sect. 2.1 of Chap. 2. The main objective of the RLPSI is to optimize, under some null restrictions, the selection response, to predict the net genetic merit H = w′g and select the individuals with the highest net genetic merit values as parents of the next generation. The RLPSI allows restrictions equal to zero to be imposed on the expected genetic gains of some traits, whereas other traits increase (or decrease) their expected genetic gains without imposing any restrictions. The RLPSI solves the LPSI equations subject to the condition that the covariance between the index and some linear functions of the genotypes involved be zero, thus preventing selection on the RLPSI from causing any genetic change in some expected genetic gains of the traits (Cunningham et al. 1970).
Vector b = P−1Gw maximizes the LPSI selection response, expected genetic gains per trait, and the correlation between the LPSI and H = w′g. In this section, we show that the vector of the RLPSI coefficients, bR = Kb:
-
1.
Maximizes the RLPSI selection response.
-
2.
Impose null restrictions on the RLPSI expected genetic gains per trait (or multi-trait selection response).
-
3.
Maximizes the correlation with the true net genetic merit.
-
4.
Minimizes the mean prediction error.
Vector bR = Kb is a linear transformation of the LPSI vector of coefficients (b) made by the projector matrix K. Matrix K is idempotent (K = K2) and projects b into a space smaller than the original space of b because the restrictions imposed on the expected genetic gains per trait are equal to zero. The reduction of the space into which matrix K projects b is equal to the number of null restrictions imposed by the breeder on the expected genetic gain per trait, or multi-trait selection response (Cerón-Rojas et al. 2016).
The covariance between the breeding value vector (g) and the LPSI (I = b′y) is Cov(I, g) = Gb. Suppose that the breeder is interested in improving only (t − r) of t (r < t) traits, leaving r of them fixed, that is, r expected genetic gains of the trait are equal to zero for a specific selection cycle. Thus, we want r covariances between the linear combinations of g (U′g) and the I = b′y to be zero, i.e., Cov(I, U′g) = U′Gb = 0, where U′ is a matrix with r 1’s and (t − r) 0’s; 1 indicates that the trait is restricted and 0 that the trait is not restricted. That is, in the linear combinations of g (U′g), 1 is the coefficient of the genotypes that have covariance equal to zero with the LPSI, whereas the genotypes with coefficient 0 have no restriction on the expected genetic gains. We can solve this problem by maximizing the correlation between I and H (ρHI) or minimizing the mean squared difference between I and H(E[(H − I)2]) under the restriction U′Gb = 0.
3.1.1 The Maximized RLPSI Parameters
In the LPSI context, vector b = P−1Gw minimizes the mean squared difference between I and H, E[(H − I)2] = w′Gw + b′Pb − 2w′Gb. Let C′ = U′G and C′b = 0; we need to minimize E[(H − I)2] with respect to b under the restriction C′b = 0. Thus, assuming that P, G, U′ and w are known, we need to minimize the function
with respect to vectors b and v′ = [v1 v2 ⋯ vr − 1], where v is a vector of Lagrange multipliers. The derivative results from b and v′ are
and
or, in matrix notation,
In the latter case of Eq. (3.2), the solution is
where \( {\left[\begin{array}{cc}\mathbf{0}& {\mathbf{C}}^{\prime}\\ {}\mathbf{C}& \mathbf{P}\end{array}\right]}^{-1} \) is the inverse of matrix \( \left[\begin{array}{cc}\mathbf{0}& {\mathbf{C}}^{\prime}\\ {}\mathbf{C}& \mathbf{P}\end{array}\right] \) and bR is the RLPSI vector of coefficients. There is a mathematical algorithm (Searle 1966; Schott 2005) for finding matrix \( {\left[\begin{array}{cc}\mathbf{0}& {\mathbf{C}}^{\prime}\\ {}\mathbf{C}& \mathbf{P}\end{array}\right]}^{-1} \). It can be shown that
whence the RLPSI vector of coefficients (bR) that minimizes E[(H − I)2] and maximizes ρHI under the restriction C′b = 0 can be written as
where K = [I − Q], Q = P−1C(C′P−1C)−1C′ and b = P−1Gw; P−1 is the inverse of matrix P and I is an identity matrix t × t. When there are no restrictions on any traits, U′ is a null matrix and bR = b = P−1Gw, the LPSI vector of coefficients. Thus, the RLPSI includes the LPSI as a particular case.
According to Eq. (3.5), the RLPSI can be written as
whereas the maximized correlation between the RLPSI and the net genetic merit is
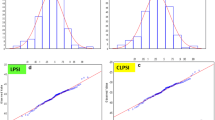
According to conditions for constructing a valid RLPSI, the index \( {I}_R={\mathbf{b}}_R^{\prime}\mathbf{y} \) should have normal distributions. Using 1 and 2 null restrictions, this assumption is illustrated in Fig. 3.1 for a real maize (Zea mays) F2 population with 247 lines and four traits—grain yield (ton ha−1); plant height (cm), ear height (cm), and anthesis day (days)—evaluated in one environment. Figure 3.1 indicates that, in effect, the RLPSI values approach normal distribution.

(a) and (b) show the distributions of 247 values of the restricted linear phenotypic selection index (RLPSI), with one and two restrictions respectively, constructed with the phenotypic means of four maize (Zea mays) F2 population traits: grain yield (ton ha−1), plant height (cm), ear height (cm), and anthesis day (days), evaluated in one environment
Under the null restrictions made by the breeder, \( {I}_R={\mathbf{b}}_R^{\prime}\mathbf{y} \) should have maximum correlation with H = w′g and should be useful for ranking and selecting among individuals with different net genetic merit; however, \( {\rho}_{HI_R} \) is lower than the correlation between LPSI and H = w′g (ρHI) in each selection cycle because when the restriction C′b = 0 is imposed on the RLPSI vector of coefficients, the restricted traits do not affect the correlation \( {\rho}_{HI_R} \). Using simulated data described in Sect. 2.8.1 of Chap. 2, we estimated \( {\rho}_{HI_R} \) and ρHI for seven selection cycles and compared the results in Fig. 3.2. Correlation \( {\rho}_{HI_R} \) values were estimated for one, two, and three null restrictions and in effect, they were lower than the estimated values of ρHI in all selection cycles (Fig. 3.2). Additional results can be seen in Chap. 10, where the RLPSI was simulated for many selection cycles. Chapter 11 describes RIndSel: a program that uses R (in this case R denotes a platform for data analysis, see Kabakoff 2011 for details) and the selection index theory to select individual candidates for selection.

Estimated correlation values between the linear phenotypic selection index (LPSI) and the net genetic merit (H = w′g); estimated correlation values between the RLPSI and H for one (red), two (yellow), and three (green) restrictions for four traits and 500 genotypes in one environment simulated for seven selection cycles
The maximized RLPSI selection response and the restricted expected genetic gain per trait can be written as
and
respectively, where kI is the standardized selection differential or selection intensity associated with the RLPSI.
The maximized RLPSI selection response has the same form as the maximized LPSI selection response; thus, under r restrictions, Eq. (3.8) predicts the mean improvement in H owing to indirect selection on \( {I}_R={\mathbf{b}}_R^{\prime}\mathbf{y} \) when bR = Kb. The restriction effects are observed on the RLPSI expected genetic gains per trait (Eq. 3.9) where each restricted trait has an expected genetic gain equal to zero. In addition, because the RLPSI selection response and expected genetic gain per trait values are also affected by the restricted traits, they are lower than the LPSI selection response and expected genetic gain per trait values.
3.1.2 Statistical Properties of the RLPSI
Under the assumptions that H = w′g and \( {I}_R={\mathbf{b}}_R^{\prime}\mathbf{y} \) have a bivariate joint normal distribution, bR = Kb, b = P−1Gw, and P, G, and w are known, the RLPSI has the following properties:
-
1.
Matrices Q = P−1C(C′P−1C)−1C′ and K = [I − Q] are projectors. That is, Q and K are idempotent (Q = Q2 and K = K2) and orthogonal (KQ = QK = 0). It can be shown that Q = Q2, K = K2, and KQ = QK = 0 noting that
Q2 = P−1C(C′P−1C)−1C′P−1C(C′P−1C)−1C′ = P−1C(C′P−1C)−1C′ = Q, K2 = [I − Q][I − Q] = I − 2Q + Q2 = I − Q = K, and KQ = QK = Q − Q2 = 0.
-
2.
Matrix Q projects vector b into a space generated by the columns of matrix C owing to the restriction C′b = 0 used when Ψ(b, v) is maximized with respect to b and v.
-
3.
Matrix K projects b into a space perpendicular to the space generated by the C matrix columns (Rao 2002).
-
4.
Because of the restriction C′b = 0, matrix K projects b into a space smaller than the original space of b. The space reduction into which matrix K projects b is equal to the number of zeros that appears in Eq. (3.9).
-
5.
Vector bR = Kb minimizes the mean square error under the restriction C′b = 0.
-
6.
The variance of \( {I}_R={\mathbf{b}}_R^{\prime}\mathbf{y} \) (\( {\sigma}_{I_R}^2={\mathbf{b}}_R^{\prime }{\mathbf{Pb}}_R \)) is equal to the covariance between \( {I}_R={\mathbf{b}}_R^{\prime}\mathbf{y} \) and H = w′g (\( {\sigma}_{HI_R}={\mathbf{w}}^{\prime }{\mathbf{Gb}}_R \)). First note that K = K2, K′P = PK, and b′P = w′G; then \( {\sigma}_{I_R}^2={\mathbf{b}}_R^{\prime }{\mathbf{Pb}}_R={\mathbf{b}}^{\prime }{\mathbf{K}}^{\prime}\mathbf{PKb}={\mathbf{b}}^{\prime }{\mathbf{PK}}^2\mathbf{b}={\mathbf{b}}^{\prime}\mathbf{PKb}={\mathbf{w}}^{\prime }{\mathbf{Gb}}_R={\sigma}_{HI_R} \).
-
7.
The maximized correlation between H and IR is equal to \( {\rho}_{HI_R}=\frac{\sigma_{I_R}}{\sigma_H} \). In point 6 of this subsection we showed that \( {\sigma}_{HI_R}={\sigma}_{I_R}^2 \); then
\( {\rho}_{HI_R}=\frac{{\mathbf{w}}^{\prime }{\mathbf{Gb}}_R}{\sqrt{{\mathbf{w}}^{\prime}\mathbf{Gw}}\sqrt{{\mathbf{b}}_R^{\prime }{\mathbf{Pb}}_R}}=\sqrt{\frac{{\mathbf{b}}_R^{\prime }{\mathbf{Pb}}_R}{{\mathbf{w}}^{\prime}\mathbf{Gw}}}=\frac{\sigma_{I_R}}{\sigma_H}. \)
-
8.
The variance of the predicted error, \( Var\left(H-{I}_R\right)=\left(1-{\rho}_{HI_R}^2\right){\sigma}_H^2 \), is minimal. By point 6 \( {\sigma}_{HI_R}={\sigma}_{I_R}^2 \), whence \( Var\left(H-{I}_R\right)={\sigma}_H^2-{\sigma}_{I_R}^2=\left(1-{\rho}_{HI_R}^2\right){\sigma}_H^2 \).
-
9.
RLPSI heritability is equal to \( {\mathrm{h}}_{{\mathrm{I}}_{\mathrm{R}}}^2=\frac{{\mathbf{b}}_R^{\prime }{\mathbf{Gb}}_R}{{\mathbf{b}}_R^{\prime }{\mathbf{Pb}}_R} \).
Points 1–4 show that in effect, the RLPSI projects the LPSI vector of coefficients into a space smaller than the original LPSI vector of coefficients. In addition, the RLPSI statistical properties denoted by points 5–9 are the same as the LPSI statistical properties. Thus, the RLPSI is a variant of the LPSI.
3.1.3 The RLPSI Matrix of Restrictions
The main difference between the RLPSI and the LPSI is the restriction U′Gb = 0 used to obtain the RLPSI vector of coefficients. This restriction is introduced through matrix U′ (t − 1) × t, which is called matrix of null restrictions and is very important in an RLPSI context. The form and size of matrix U′ depends on the number of restricted traits. For example, suppose that we restrict only one of t traits; then we can restrict the first of them as \( {\mathbf{U}}^{\prime }=\left[1\kern0.5em 0\kern0.5em 0\kern0.5em \cdots \kern0.5em 0\right] \), the second as \( {\mathbf{U}}^{\prime }=\left[0\kern0.5em 1\kern0.5em 0\kern0.5em \cdots \kern0.5em 0\right] \), the third as \( {\mathbf{U}}^{\prime }=\left[0\kern0.5em 0\kern0.5em 1\kern0.5em \cdots \kern0.5em 0\right] \), etc. When we restrict two of t traits, matrix U′ could be constructed as follows. We can restrict the first and second traits as \( {\mathbf{U}}^{\prime }=\left[\begin{array}{ccccc}1& 0& 0& \cdots & 0\\ {}0& 1& 0& \cdots & 0\end{array}\right] \), the first and third traits as \( {\mathbf{U}}^{\prime }=\left[\begin{array}{ccccc}1& 0& 0& \cdots & 0\\ {}0& 0& 1& \cdots & 0\end{array}\right] \), the second and third traits as \( {\mathbf{U}}^{\prime }=\left[\begin{array}{ccccc}0& 1& 0& \cdots & 0\\ {}0& 0& 1& \cdots & 0\end{array}\right] \), etc. If we restrict three of t traits, matrix U′ will have the following form when the first, second, and third traits are restricted, \( {\mathbf{U}}^{\prime }=\left[\begin{array}{cccccc}1& 0& 0& 0& \cdots & 0\\ {}0& 1& 0& 0& \cdots & 0\\ {}0& 0& 1& 0& \cdots & 0\end{array}\right] \); if the first, second, and fourth traits are restricted, \( {\mathbf{U}}^{\prime }=\left[\begin{array}{cccccc}1& 0& 0& 0& \cdots & 0\\ {}0& 1& 0& 0& \cdots & 0\\ {}0& 0& 0& 1& \cdots & 0\end{array}\right] \), if the second, the third and the fourth traits are restricted, \( {\mathbf{U}}^{\prime }=\left[\begin{array}{cccccc}0& 1& 0& 0& \cdots & 0\\ {}0& 0& 1& 0& \cdots & 0\\ {}0& 0& 0& 1& \cdots & 0\end{array}\right] \), etc. The procedure to construct matrix U′ is valid for any number of restricted traits.
There are \( \sum \limits_{r=0}^t\left(\begin{array}{c}t\\ {}r\end{array}\right)={2}^t \) (Leon-Garcia 2008) possible forms for constructing matrix U′, where \( \left(\begin{array}{c}t\\ {}r\end{array}\right)=\frac{t!}{r!\left(t-r\right)!} \) and t ! = t(t − 1)(t − 2)(t − 3)⋯(t − (t − 1)). Note, however, that when r = 0, U′ is a null matrix, and when r = t, all traits are restricted and then the RLPSI values are null. Thus, the breeder should be interested only in 2t − 2 possible ways of constructing matrix U′.
3.1.4 Numerical Examples
To illustrate the RLPSI theoretical results, we use the data set described in Sect. 2.8.1 of Chap. 2. We used that data set for seven phenotypic selection cycles (C1 to C7), each with four traits (T1, T2, T3 and T4), 500 genotypes and four replicates for each genotype. The economic weights for T1, T2, T3, and T4 were 1, −1, 1, and 1 respectively. The estimated phenotypic (\( \widehat{\mathbf{P}} \)) and genetic (\( \widehat{\mathbf{G}} \)) covariance matrices for traits T1, T2, T3, and T4 obtained for the first selection cycle (C1) of the simulated data were
respectively. We can restrict T1 with matrix \( {\mathbf{U}}_1^{\prime }=\left[1\kern0.5em 0\kern0.5em 0\kern0.5em 0\right] \); T1 and T2 with matrix \( {\mathbf{U}}_2^{\prime }=\left[\begin{array}{cccc}1& 0& 0& 0\\ {}0& 1& 0& 0\end{array}\right] \), and T1, T2 and T3 with matrix \( {\mathbf{U}}_3^{\prime }=\left[\begin{array}{cccc}1& 0& 0& 0\\ {}0& 1& 0& 0\\ {}0& 0& 1& 0\end{array}\right] \). Matrix \( {\mathbf{C}}^{\prime }={\mathbf{U}}^{\prime}\widehat{\mathbf{G}} \) associated with \( {\mathbf{U}}_1^{\prime } \), \( {\mathbf{U}}_2^{\prime } \), and \( {\mathbf{U}}_3^{\prime } \) can be obtained as \( {\mathbf{C}}_1^{\prime }={\mathbf{U}}_1^{\prime}\mathbf{G}=\left[36.21\kern0.5em -12.93\kern0.5em 8.35\kern0.5em 2.74\right] \),
The estimated LPSI vector of coefficients was \( {\widehat{\mathbf{b}}}^{\prime }={\mathbf{w}}^{\prime}\widehat{\mathbf{G}}{\widehat{\mathbf{P}}}^{-1}=\left[0.55\kern0.5em -1.05\kern0.5em 1.09\kern0.5em 1.06\right] \).
The estimated matrices \( \widehat{\mathbf{Q}}={\widehat{\mathbf{P}}}^{-1}\mathbf{C}{\left({\mathbf{C}}^{\prime }{\widehat{\mathbf{P}}}^{-1}\mathbf{C}\right)}^{-1}{\mathbf{C}}^{\prime } \) and \( \widehat{\mathbf{K}}=\left[{\mathbf{I}}_4-\widehat{\mathbf{Q}}\right] \) (where I4 is an identity matrix 4 × 4) for 1 null restriction, were
Thus, the estimated RLPSI vector of coefficients was \( {\widehat{\mathbf{b}}}_{R_1}^{\prime }={\left({\widehat{\mathbf{K}}}_1\widehat{\mathbf{b}}\right)}^{\prime }=\left[-0.35\kern0.5em -0.41\kern0.5em 0.59\kern0.5em 0.89\right] \), whence the estimated RLPSI for 1 null restriction can be written as \( {\widehat{I}}_{R_1}=-0.35{T}_1-0.41{T}_2+0.59{T}_3+0.89{T}_4 \). The average values of T1, T2, T3, and T4 were 164.46, 39.63, 34.66, and 23.11 (Table 3.1) respectively; then,
In Table 3.1 we present ten genotypes, the mean values of four traits, and the unranked and ranked values of the RLPSI from 500 genotypes in one environment simulated for one selection cycle. The first part of Table 3.1 presents the ten unranked genotypes, whereas the second part presents the ten genotypes ranked by the estimated RLPSI values.
Assuming a selection intensity of 10% (kI = 1.755), the estimated selection response and the estimated expected genetic gain per trait for 1 null restriction were \( {\widehat{R}}_{R_1}=1.755\sqrt{{\widehat{\mathbf{b}}}_{R_1}^{\prime }{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_{R_1}}=6.87\kern1em \mathrm{and}\kern1em {\widehat{\mathbf{E}}}_{R_1}^{\prime }=1.755\frac{{\widehat{\mathbf{b}}}_{R_1}^{\prime}\widehat{\mathbf{G}}}{\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_{R_1}{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_{R_1}}}=\left[0\kern0.5em -2.2\kern0.5em 2.03\kern0.5em 2.66\right], \) respectively, and the estimated correlation between the RLPSI and the net genetic merit was \( {\widehat{\rho}}_{HI_{R_1}}=\sqrt{\frac{{\widehat{{\mathbf{b}}^{\prime}}}_{R_1}{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_{R_1}}{{\mathbf{w}}^{\prime}\widehat{\mathbf{G}}\mathbf{w}}}=0.35 \).
In a similar manner to that for 1 null restriction, it is possible to obtain the estimated matrices \( \widehat{\mathbf{Q}}={\widehat{\mathbf{P}}}^{-1}\mathbf{C}{\left({\mathbf{C}}^{\prime }{\widehat{\mathbf{P}}}^{-1}\mathbf{C}\right)}^{-1}{\mathbf{C}}^{\prime } \) and \( \widehat{\mathbf{K}}=\left[{\mathbf{I}}_4-\widehat{\mathbf{Q}}\right] \), and the estimated RLPSI vector of coefficients for 2 and 3 null restrictions. Thus, for 2 and 3 null restrictions, the estimated selection responses were \( {\widehat{R}}_{R_2}=1.755\sqrt{{\widehat{\mathbf{b}}}_{R_2}^{\prime }{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_{R_2}}=5.54 \) and \( {\widehat{R}}_{R_3}=1.755\sqrt{{\widehat{\mathbf{b}}}_{R_3}^{\prime }{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_{R_3}}=4.12 \) respectively, whereas the estimated expected genetic gains per trait were \( {\widehat{\mathbf{E}}}_{R_2}^{\prime }=1.755\frac{{\widehat{\mathbf{b}}}_{R_2}^{\prime}\mathbf{G}}{\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_{R_2}{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_{R_2}}}=\left[0\kern0.5em 0\kern0.5em 2.773\kern0.5em 2.768\right]\kern1em \mathrm{and} \) \( {\widehat{\mathbf{E}}}_{R_3}^{\prime }=1.755\frac{{\widehat{\mathbf{b}}}_{R_3}^{\prime}\mathbf{G}}{\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_{R_3}{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_{R_3}}}=\left[0\kern0.5em 0\kern0.5em 0\kern0.5em 4.12\right]. \)
Note that the estimated RLPS selection response decreased when the number of restrictions increased. Also, the number of zeros in the expected genetic gain per trait increased from 1 to 3 depending on the number of null restrictions. The same is true for the estimated correlation between the RLPSI and the net genetic merit (Fig. 3.2).
Table 3.2 presents the estimated LPSI selection response and its heritabilities, and the estimated RLPSI selection response and its heritabilities for 1, 2, and 3 null restrictions for seven simulated selection cycles using a selection intensity of 10% (kI = 1.755). Note that the averages of the estimated RLPSI selection response for the seven selection cycles were 6.76, 5.30, and 3.70 for 1, 2, and 3 null restrictions respectively, and that 3.70, the average value for 3 null restrictions, is only 54.73% of the average value for 1 null restriction (6.76). However, the estimated RLPSI heritabilities for 1, 2, and 3 null restrictions tend to increase. This is because the simulated true heritabilities of traits T1, T2, T3, and T4 were 0.4, 0.6, 0.6, and 0.8 respectively, whereas the averages of the estimated heritabilities of traits T1, T2, T3, and T4 were 0.70, 0.78, and 0.87 for 1, 2, and 3 null restrictions respectively.
Table 3.3 presents the estimated LPSI expected genetic gain per trait and the estimated RLPSI expected genetic gain per trait for 1, 2, and 3 null restrictions for seven simulated selection cycles using a selection intensity of 10% (kI = 1.755). In effect, due to the restriction C′b = 0, matrix K projects b into a space smaller than the original space of b and the space reduction into which matrix K projects b is equal to the number of zeros that appear in the RLPSI expected genetic gain per trait.
It can be shown that in the three restrictions case (Table 3.3) the estimated RLPSI expected genetic gain pert traits (or multi-trait selection response) is equal to the one trait selection response (Eqs. 2.4 and 2.5) when only trait T4 is selected. This means that in effect, when we imposed three restriction over the RLPSI expected genetic gains pert trait, we reduced one space of four dimensions to one space of only one dimension.
3.2 The Predetermined Proportional Gains Linear Phenotypic Selection Index
This index is called the predetermined proportional gains phenotypic selection index (PPG-LPSI) because the breeder pre-sets optimal levels for certain traits before the selection is carried out. The conditions for constructing a valid PPG-LPSI are the same as those described for the LPSI in Sect. 2.1 of Chap. 2. Some of the main objectives of the PPG-LPSI are to optimize the expected genetic gain per trait, predict the net genetic merit H = w′g, and select the individuals with the highest net genetic merit values as parents of the next generation. The PPG-LPSI allows restrictions different from zero to be imposed on the expected genetic gains of some traits, whereas other traits increase (or decrease) their expected genetic gains without imposing any restrictions. The PPG-LPSI solves the LPSI equations subject to the condition that the covariance between the LPSI and some linear functions of the genotypes involved be equal to a vector of predetermined constants or genetic gains defined by the breeder (Cunningham et al. 1970).
Let \( {\mathbf{d}}^{\prime }=\left[{d}_1\kern0.5em {d}_2\kern0.5em \cdots \kern0.5em {d}_r\right] \) be a vector r × 1 of the predetermined proportional gains and assume that μq is the population mean of the qth trait before selection. One objective could be to change μq to μq + dq, where dq is a predetermined change in μq (in the RLPSI, dq = 0, q = 1, 2, ⋯, r, where r is the number of predetermined proportional gains). We can solve this problem in a similar manner to that used with the RLPSI. That is, minimizing the mean squared difference between I and H(E[(H − I)2]) under the restriction D′U′Gb = 0, where \( {\mathbf{D}}^{\prime }=\left[\begin{array}{ccccc}{d}_r& 0& \cdots & 0& -{d}_1\\ {}0& {d}_r& \cdots & 0& -{d}_2\\ {}\vdots & \vdots & \ddots & \vdots & \vdots \\ {}0& 0& \cdots & {d}_r& -{d}_{r-1}\end{array}\right] \) is a Mallard (1972) matrix (r − 1) × r of predetermined proportional gains, dq (q = 1, 2…, r) is the qth element of vector d′, U′ is the RLPSI matrix of restrictions of 1’s and 0’s described earlier in this chapter, G is the covariance matrix of genotypic values, and b is the LPSI vector of coefficients. Also, it is possible to minimize E[(H − I)2] under the restriction U′Gb = θd (Tallis 1985), where θ is a proportionality constant, which is a scalar to be determined a posteriori (Lin 2005), that is, θ is indeterminate a priori (Itoh and Yamada 1987). Both approaches are very similar but the equations obtained when introducing the D′U′Gb = 0 restriction are simpler than when introducing U′Gb = θd restrictions into the process of minimizing E[(H − I)2]. The D′U′Gb = 0 restriction leads to a set of equations similar to Eq. (3.5) whereas the U′Gb = θd restriction leads to a set of equations that are difficult to solve.
3.2.1 The Maximized PPG-LPSI Parameters
Let M′ = D′C′ be the Mallard (1972) matrix of predetermined restrictions, where C′ = U′G. Under the restriction M′b = 0, we can minimize E[(I − H)2], assuming that P, G, U′, D′, and w are known; that is, we need to minimize the function
with respect to vectors b and \( {\mathbf{v}}^{\prime }=\left[{v}_1\kern0.5em {v}_2\kern0.5em \cdots \kern0.5em {v}_{r-1}\right] \), where v is a vector of Lagrange multipliers. Note that the only difference between Eqs. (3.1) and (3.10) is matrix D′ and that matrix M′ = D′C′ has the same function in Eq. (3.10) that matrix C′ = U′G had in Eq. (3.1). Then, the derivative results of Eq. (3.10) from b and v should be similar to those of Eq. (3.1), i.e.,
whence the vector that minimizes E[(H − I)2] under the restriction M′b = 0 is
where KM = [It − QM], QM = P−1M(M′P−1M)−1M′ = P−1CD(D′C′P−1CD)−1D′C′, and It is an identity matrix of size t × t. When D = U, bM = bR (the RLPSI vector of coefficients), and when D = U and U′ is a null matrix, bM = b (the LPSI vector of coefficients). Thus, the Mallard (1972) index is more general than the RLPSI and is an optimal PPG-LPSI. In addition, it includes the LPSI and the RLPSI as particular cases.
Instead of using restriction M′b = 0 to minimize E[(I − H)2], we can use restriction C′b = θd and minimize
with respect to b, v′, and θ (Tallis 1985; Lin 2005) assuming that P, G, U′, d, and w are known. The derivative results in matrix notation are
where 0t × 1 is a null vector t × 1, 0r × t is a null matrix r × t, and 0 is a null column vector (r − 1) × 1; 0 is the standard zero value. The inverse matrix of coefficients \( {\left[\begin{array}{ccc}\mathbf{P}& \mathbf{C}& {\mathbf{0}}_{t\times 1}\\ {}{\mathbf{C}}^{\prime }& {\mathbf{0}}_{r\times t}& -\mathbf{d}\\ {}{\mathbf{0}}_{1\times t}^{\prime }& -{\mathbf{d}}^{\prime }& 0\end{array}\right]}^{-1} \) in Eq. (3.13) is not easy to obtain; for this reason, Tallis (1985) obtained his results in two steps. That is, Tallis (1985) first derived Eq. (3.12) with respect to b and v′, whence he obtained
where bR = Kb (Eq. 3.5), δ = P−1C(C′P−1C)−1d, and \( {\mathbf{d}}^{\prime }=\left[{d}_1\kern0.5em {d}_2\kern0.5em \cdots \kern0.5em {d}_r\right] \). Next, he derived \( E\left[{\left({\mathbf{b}}_T^{\prime}\mathbf{y}-H\right)}^2\right] \) only with respect to θ, and his result was
where b = P−1Gw is the LPSI vector of coefficients, C′ = U′G, d is the vector of the predetermined proportional gains imposed by the breeder and P−1 is the inverse of matrix P. When θ = 0, bT = bR, and if θ = 0 and U′ is the null matrix, bT = b. That is, the PPG-LPSI obtained by Tallis (1985) is more general than the RLPSI and the LPSI. The foregoing results indicate that Eq. (3.14) consists of three parts:
-
1.
Vector bR = Kb, which represents the weights of the RLPSI with the restriction that the expected genetic gain per trait be equal to zero.
-
2.
Vector δ = P−1C(C′P−1C)−1d, which should represent the weights of the PPG-LPSI leading to the greatest improvement in the desired direction independently of economic weights.
-
3.
θ represents the regression coefficient of H = w′g on δ = P−1C(C′P−1C)−1d (Itoh and Yamada 1987).
When θ = 1, Eq. (3.14) is equal to
The latter equation was the original result obtained by Tallis (1962). Tallis (1962) derived Eq. (3.12) with respect to vectors b and v under the restriction U′Gb = d, i.e., without θ or θ = 1. Later, James (1968) maximized the correlation between I and H(ρHI) under the Tallis (1962) restriction and once more obtained Eq. (3.16). Mallard (1972) showed that Eq. (3.16) is not optimal, i.e., it does not minimize E[(I − H)2] and does not maximize ρHI, and gave the optimal solution, which we have presented here in Eq. (3.11). Later, using restriction U′Gb = θd, Tallis (1985) obtained Eq. (3.14), which also is optimal.
Figure 3.3 presents the estimated correlation values between PPG-LPSI and the net genetic merit (H = w′g) for the optimal PPG-LPSI (Eq. 3.14) and non-optimal PPG-LPSI (Eq. 3.16) using one (d1 = 7), two (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\right] \)), and three (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\kern0.5em 5\right] \)) predetermined restrictions, four traits and 500 simulated genotypes in one environment for seven selection cycles (see Sect. 2.8.1 of Chap. 2). Note that in effect, the non-optimal PPG-LPSI has lower correlations than the optimal PPG-LPSI for the seven simulated selection cycles.

Estimated correlation values between the predetermined proportional gain linear phenotypic selection index (PPG-LPSI) and the net genetic merit (H = w′g) for the optimal and non-optimal PPG-LPSI using 1 (d1 = 7), 2 (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\right] \)) and 3 (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\kern0.5em 5\right] \)) predetermined restrictions, 4 traits and 500 simulated genotypes in 1 environment for 7 selection cycles
Let bP = bM = bT be the PPG-LPSI vector of coefficients. Then, the optimal PPG-LPSI can be written as
whereas the maximized correlation between the PPG-LPSI and the net genetic merit is
According to the conditions for constructing a valid PPG-LPSI described in Sect. 2.1 of Chap. 2, the index \( {I}_P={\mathbf{b}}_P^{\prime}\mathbf{y} \) should have normal distributions. Figure 3.4 presents the distribution of 500 estimated PPG-LPSI values with two (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\right] \)) and three (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\kern0.5em 5\right] \)) predetermined restrictions respectively, obtained from one selection cycle, with four traits and 500 genotypes simulated in one environment (see Chap. 2, Sect. 2.8.1 for details). Figure 3.4 indicates that, in effect, the PPG-LPSI values approach normal distribution.

(a) and (b) show the distribution of 500 estimated predetermined proportional gain linear phenotypic selection index values with two (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\right] \)) and three (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\kern0.5em 5\right] \)) predetermined restrictions respectively, obtained from one selection cycle for 500 genotypes and four traits simulated in one environment
Under the predetermined restrictions imposed by the breeder, \( {I}_P={\mathbf{b}}_P^{\prime}\mathbf{y} \) should have maximal correlation with H = w′g and it should be useful for ranking and selecting among individuals with different net genetic merits. However, for more than two restrictions the proportionality constant (θ) could be lower than 1; in that case, \( {\rho}_{HI_P} \) is lower than the correlation between LPSI and H = w′g (ρHI). In addition, when the restriction M′b = 0 or U′Gb = θd is imposed on the PPG-LPSI vector of coefficients, the restricted traits decrease their effect on the correlation between PPG-LPSI and H = w′g. Using the simulated data set described in Sect. 2.8.1 of Chap. 2, we estimated \( {\rho}_{HI_P} \) and ρHI for seven selection cycles and compared the results in Fig. 3.5. Correlation \( {\rho}_{HI_P} \) values were estimated using one (d1 = 7), two (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\right] \)), and three (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\kern0.5em 5\right] \)) predetermined restrictions. Figure 3.5 indicates that when the number of predetermined restrictions is equal to or higher than two, the estimated values of \( {\rho}_{HI_P} \) decrease more than when only one predetermined restriction is imposed on the PPG-LPSI.

Estimated correlation values between the LPSI and the net genetic merit (H = w′g); and estimated correlation values between the PPG-LPSI and H with one (d1 = 7), two (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\right] \)), and three (\( {\mathbf{d}}^{\prime }=\left[7\kern0.5em -3\kern0.5em 5\right] \)) predetermined restrictions obtained from seven selection cycles for four traits and 500 simulated genotypes in one environment
The maximized PPG-LPSI selection response and expected genetic gains per trait can be written as
and
respectively, where kI is the standardized selection differential or selection intensity associated with the PPG-LPSI.
The maximized PPG-LPS selection response (Eq. 3.19) has the same form as the maximized LPSI selection response. Thus, under r predetermined restrictions, Eq. (3.19) predicts the mean improvement in H due to indirect selection on \( {I}_P={\mathbf{b}}_P^{\prime}\mathbf{y} \). Predetermined restriction effects are observed on the PPG-LPSI expected genetic gain per trait (Eq. 3.20). The main difference between the RLPSI and the PPG-LPSI is the vector of predetermined proportional gains.
3.2.2 Statistical Properties of the PPG-LPSI
Assuming that H = w′g and \( {I}_P={\mathbf{b}}_P^{\prime}\mathbf{y} \) have a bivariate joint normal distribution, bP = KMb, b = P−1Gw, and P, G and w are known, the PPG-LPSI has the same properties as the RLPSI. Some of the main PPG-LPSI properties are:
-
1.
Matrices QM = P−1M(M′P−1M)−1M′ and KM = [I − QM] have the same function as matrices Q = P−1C(C′P−1C)−1C′ and K = [I − Q] in the RLPSI.
-
2.
Matrices QM and KM are both projectors, i.e., they are idempotent (\( {\mathbf{K}}_M={\mathbf{K}}_M^2 \) and \( {\mathbf{Q}}_M={\mathbf{Q}}_M^2 \)), unique and orthogonal, i.e., KMQM = QMKM = 0.
-
3.
Matrix QM projects b into a space generated by the columns of matrix M due to the restriction M′b = 0 that is introduced when Φ(b, v) is maximized with respect to b, whereas matrix KM projects b into a space that is perpendicular to the space generated by the columns of matrix M (Rao 2002). Thus, the function of matrix KM is to transform vector b = P−1Gw into vector bP = KMb.
-
4.
The variance of \( {I}_P={\mathbf{b}}_P^{\prime}\mathbf{y} \) (\( {\sigma}_{I_P}^2={\mathbf{b}}_P^{\prime }{\mathbf{Pb}}_P \)) is equal to the covariance between \( {I}_P={\mathbf{b}}_P^{\prime}\mathbf{y} \) and H = w′a (\( {\sigma}_{HI_P}={\mathbf{w}}^{\prime }{\mathbf{Gb}}_P \)). As \( {\mathbf{K}}_M={\mathbf{K}}_M^2 \), \( {\mathbf{K}}_M^{\prime}\mathbf{P}={\mathbf{PK}}_M \) and b′P = w′G, then
\( {\sigma}_{I_P}^2={\mathbf{b}}_P^{\prime }{\mathbf{Pb}}_P={{\mathbf{b}}^{\prime }{\mathbf{K}}^{\prime}}_M{\mathbf{PK}}_M\mathbf{b}={\mathbf{b}}^{\prime }{\mathbf{PK}}_M^2\mathbf{b}={\mathbf{b}}^{\prime }{\mathbf{PK}}_M\mathbf{b}={\mathbf{w}}^{\prime }{\mathbf{Gb}}_P={\sigma}_{HI_P}. \)
-
5.
The maximized correlation between H and \( {I}_P={\mathbf{b}}_P^{\prime}\mathbf{y} \) is equal to \( {\rho}_{HI_P}=\frac{\sigma_{I_P}}{\sigma_H} \). In point 4 of this subsection, we showed that \( {\sigma}_{HI_P}={\sigma}_{I_P}^2 \), then
\( {\rho}_{HI_P}=\frac{{\mathbf{w}}^{\prime }{\mathbf{Gb}}_P}{\sqrt{{\mathbf{w}}^{\prime}\mathbf{Gw}}\sqrt{{\mathbf{b}}_P^{\prime }{\mathbf{Pb}}_P}}=\sqrt{\frac{{\mathbf{b}}_P^{\prime }{\mathbf{Pb}}_P}{{\mathbf{w}}^{\prime}\mathbf{Gw}}}=\frac{\sigma_{I_P}}{\sigma_H}. \)
-
6.
The variance of the predicted error, \( Var\left(H-{I}_P\right)=\left(1-{\rho}_{HI_P}^2\right){\sigma}_H^2 \), is minimal. By point 4 of this subsection, \( {\sigma}_{HI_P}={\sigma}_{I_P}^2 \), then \( Var\left(H-{I}_R\right)={\sigma}_H^2-{\sigma}_{I_P}^2=\left(1-{\rho}_{HI_P}^2\right){\sigma}_H^2 \).
-
7.
The heritability of the PPG-LPSI is equal to \( {\mathrm{h}}_{{\mathrm{I}}_{\mathrm{P}}}^2=\frac{{\mathbf{b}}_P^{\prime }{\mathbf{Gb}}_P}{{\mathbf{b}}_P^{\prime }{\mathbf{Pb}}_P} \).
Points 1–3 show that in effect, the PPG-LPSI projects the LPSI vector of coefficients into a different space than the original LPSI vector of coefficients. In addition, the PPG-LPSI statistical properties denoted by points 4–7 are the same as the LPSI statistical properties. Thus, the PPG-LPSI is a variant of the LPSI.
3.2.3 There Is Only One Optimal PPG-LGSI
Let S = C′P−1C, under the restriction D′d = 0, Itoh and Yamada (1987) showed that D(D′SD)−1D′ = S−1 − S−1d(d′S−1d)−1d′S−1, whence substituting S−1 − S−1d(d′-S−1d)−1d′S−1 for D(D′SD)−1D′ in matrix QM, Eq. (3.11) can be written as Eq. (3.14), i.e., bM = bT. Therefore, the Mallard (1972) and Tallis (1985) vectors of coefficients are the same. In addition, Itoh and Yamada (1987) showed that the Harville (1975) vector of coefficients can written as \( \frac{{\mathbf{b}}_{\mathrm{T}}}{\sigma_{I_T}} \) (Eq. 2.21d), where \( {\sigma}_{I_T} \) is the standard deviation of the variance of the Tallis (1985) PPG-LPSI. Thus, in reality, there is only one optimal PPG-LPSI.
Itoh and Yamada (1987) also pointed out that matrix \( {\mathbf{D}}^{\prime }=\left[\begin{array}{ccccc}{d}_r& 0& \cdots & 0& -{d}_1\\ {}0& {d}_r& \cdots & 0& -{d}_2\\ {}\vdots & \vdots & \ddots & \vdots & \vdots \\ {}0& 0& \cdots & {d}_r& -{d}_{r-1}\end{array}\right] \) is only one example of several possible Mallard (1972) D′ matrices. They showed that any matrix D′ that satisfies condition D′d = 0 is another Mallard (1972) matrix of predetermined proportional gains. According to Itoh and Yamada (1987), matrices
are also Mallard (1972) matrices of predetermined proportional gains because they satisfy condition D′d = 0. However, matrix \( {\mathbf{D}}^{\prime }=\left[\begin{array}{ccccc}{d}_r& 0& \cdots & 0& -{d}_1\\ {}0& {d}_r& \cdots & 0& -{d}_2\\ {}\vdots & \vdots & \ddots & \vdots & \vdots \\ {}0& 0& \cdots & {d}_r& -{d}_{r-1}\end{array}\right] \) is “easier” to construct.
Harville (1975) maximized the correlation between I and H (ρIH) under the restriction C′b = θd and was the first to point out the importance of the proportionality constant (θ) in the PPG-LPSI. Mallard (1972) showed that the restriction U′Gb = d does not maximize the correlation with the net genetic merit (H = w′g) and Harville (1975) indicated that the restriction U′Gb = d only changes the sign of the genetic expected gain (or multi-trait selection response) but does not maximize the correlation between I = b′y and H = w′g. According to Mallard (1972), Harville (1975), and Tallis (1985), the PPG-LPSI is optimal only under the restriction U′Gb = θd.
Itoh and Yamada (1987) pointed out several problems associated with the Tallis (1985) PPG-PSI:
-
1.
When the number of restrictions imposed on the PPG-PSI expected genetic gains increases, θ tends to zero and then the accuracy of the PPG-PSI decreases.
-
2.
The θ values could be negative, in which case PPG-PSI results have no meaning in practice.
-
3.
The PPG-PSI may cause the population means to shift in the opposite direction to the predetermined desired direction; this may happen because of the opposite directions between the economic values and the predetermined desired direction.
Itoh and Yamada (1987) thought that one possible solution to those problems could be to use the linear phenotypic selection index with desired gains.
3.2.4 Numerical Examples
The estimated phenotypic (\( \widehat{\mathbf{P}} \)) and genetic (\( \widehat{\mathbf{G}} \)) covariance matrices described in Sect. 3.1.4 of this chapter for RLPSI are used as the first example. First, Eq. (3.11) is described to obtain the PPG-LPSI vector of coefficients. Let \( {\mathbf{d}}_2^{\prime }=\left[7\kern0.5em -3\right] \) be the vector for 2 predetermined restrictions, then, the Mallard (1972) matrix is \( {\mathbf{D}}^{\prime }=\left[-3\kern0.5em -7\right] \), while matrix U′ is \( {\mathbf{U}}_2^{\prime }=\left[\begin{array}{cccc}1& 0& 0& 0\\ {}0& 1& 0& 0\end{array}\right] \). Matrix \( {\mathbf{M}}^{\prime }={\mathbf{D}}^{\prime }{\mathbf{U}}^{\prime}\widehat{\mathbf{G}} \) for 2 predetermined restrictions will be \( {\mathbf{M}}^{\prime }={{\mathbf{D}}^{\prime }{\mathbf{U}}^{\prime}}_2\widehat{\mathbf{G}}=\left[-18.12\kern0.5em -52.49\kern0.5em -1.25\kern0.5em 7.46\right] \), whence
I4 is an identity matrix of size 4 × 4.
The estimated LPSI and PPG-LPSI vectors of coefficients were \( {\widehat{\mathbf{b}}}^{\prime }=\left[0.554\kern0.5em -1.053\kern0.5em 1.090\kern0.5em 1.058\right] \) and \( {\widehat{\mathbf{b}}}_M^{\prime }={\left({\widehat{\mathbf{K}}}_M\widehat{\mathbf{b}}\right)}^{\prime }=\left[0.793\kern0.5em -0.159\kern0.5em 1.194\kern0.5em 1.004\right] \) respectively, and the estimated PPG-LPSI was \( {\widehat{I}}_M=0.793{T}_1-0.159{T}_2+1.194{T}_3+1.004{T}_4 \). The standard deviation of the estimated variance of \( {\widehat{I}}_M \) was \( {\widehat{\sigma}}_{I_M}=\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_M{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_M}=9.526 \), whereas the estimated correlation value between the PPG-LPSI and the net genetic merit was \( {\widehat{\rho}}_{HI_P}=\frac{{\widehat{\sigma}}_{I_M}}{{\widehat{\sigma}}_H}=0.85 \), where \( {\widehat{\sigma}}_H=\sqrt{\mathbf{w}\widehat{\mathbf{G}}\mathbf{w}}=11.202 \) is the estimated standard deviation of the variance of the net genetic merit.
Suppose that the selection intensity was 10% (kI = 1.755); then, the estimated PPG-LPSI expected genetic gain per trait and the estimated selection response are \( {\widehat{\mathbf{E}}}_M^{\prime }=1.755\frac{{\widehat{\mathbf{b}}}_M^{\prime}\mathbf{G}}{\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_M{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_M}}=\left[8.013\kern0.5em -3.434\kern0.5em 3.541\kern0.5em 1.730\right]\kern1em \mathrm{and} \) \( {\widehat{R}}_M=(1.755)\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_M{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_M}=(1.755)(9.526)=16.717 \) respectively.
Now, let \( {\mathbf{d}}_3^{\prime }=\left[7\kern0.5em -3\kern0.5em 5\right] \) be the vector for three predetermined restrictions, then there are three possible predetermined Mallard matrices, i.e., \( {\mathbf{D}}_1^{\prime }=\left[\begin{array}{ccc}5& 0& -7\\ {}0& 5& 3\end{array}\right] \), \( {\mathbf{D}}_2^{\prime }=\left[\begin{array}{ccc}-3& -7& 0\\ {}0& 5& 3\end{array}\right] \), and \( {\mathbf{D}}_3^{\prime }=\left[\begin{array}{ccc}-3& -7& 0\\ {}5& 0& -7\end{array}\right] \), and matrix U′ for three restrictions is \( {\mathbf{U}}_3^{\prime }=\left[\begin{array}{cccc}1& 0& 0& 0\\ {}0& 1& 0& 0\\ {}0& 0& 1& 0\end{array}\right] \). Thus, for three predetermined restrictions matrix \( {\mathbf{M}}^{\prime }={\mathbf{D}}^{\prime }{\mathbf{U}}^{\prime}\widehat{\mathbf{G}} \) shall have three possible forms, i.e., \( {\mathbf{M}}_1^{\prime }={\mathbf{D}}_1^{\prime }{\mathbf{U}}_3^{\prime}\widehat{\mathbf{G}}=\left[\begin{array}{cccc}122.60& -40.85& -27.97& 12.58\\ {}-39.60& 55.00& 12.88& -10.72\end{array}\right] \), but \( {\mathbf{M}}_2^{\prime }={\mathbf{D}}_2^{\prime }{\mathbf{U}}_3^{\prime}\widehat{\mathbf{G}}={\mathbf{M}}_3^{\prime }=\left[\begin{array}{cccc}-18.12& -52.49& -1.25& 7.46\\ {}122.60& -40.85& -27.97& 12.58\end{array}\right] \). Note that matrix \( {\mathbf{M}}_1^{\prime } \) is different from matrices \( {\mathbf{M}}_2^{\prime } \) and \( {\mathbf{M}}_3^{\prime } \), and that the two latter are the same; however, both matrices should lead to the same estimated PPG-LPSI vector of coefficients and to the same estimated PPG-LPSI expected genetic gain per trait and selection response. It can be shown that for matrices \( {\mathbf{M}}_1^{\prime } \), \( {\mathbf{M}}_2^{\prime } \), and \( {\mathbf{M}}_3^{\prime } \), matrices \( {\widehat{\mathbf{Q}}}_M \) and \( {\widehat{\mathbf{K}}}_M=\left[{\mathbf{I}}_4-{\widehat{\mathbf{Q}}}_M\right] \) are the same and can be written as
The estimated LPSI vector of coefficients was equal to \( {\widehat{\mathbf{b}}}^{\prime }=\left[0.554\kern0.5em -1.053\kern0.5em 1.090\kern0.5em 1.058\right] \), whereas the estimated PPG-LPSI vector of coefficients was \( {\widehat{\mathbf{b}}}_M^{\prime }={\left({\widehat{\mathbf{K}}}_M\widehat{\mathbf{b}}\right)}^{\prime }=\left[0.342\kern0.5em -0.035\kern0.5em 1.960\kern0.5em 0.914\right] \). The estimated PPG-LPSI was \( {\widehat{I}}_M=0312{T}_1-0.035{T}_2+1.960{T}_3+0.914{T}_4 \) and the standard deviation of the estimated variance of \( {\widehat{I}}_M \) was \( {\widehat{\sigma}}_{I_M}=\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_M{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_M}=8.68 \). The estimated correlation value between the PPG-LPSI and the net genetic merit was \( {\widehat{\rho}}_{HI_P}=\frac{{\widehat{\sigma}}_{I_M}}{{\widehat{\sigma}}_H}=0.775 \), where \( {\widehat{\sigma}}_H=\sqrt{\mathbf{w}\widehat{\mathbf{G}}\mathbf{w}}=11.202 \) is the estimated standard deviation of the variance of the net genetic merit.
Using a selection intensity of 10% (kI = 1.755), the estimated PPG-LPSI expected genetic gain per trait and the estimated selection response were \( {\widehat{\mathbf{E}}}_M^{\prime }=1.755\frac{{\widehat{\mathbf{b}}}_M^{\prime}\mathbf{G}}{\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_M{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_M}}=\left[6.410\kern0.5em -2.747\kern0.5em 4.579\kern0.5em 1.496\right] \) and \( {\widehat{R}}_M=(1.755)\sqrt{{\widehat{{\mathbf{b}}^{\prime}}}_M{\widehat{\mathbf{P}}\widehat{\mathbf{b}}}_M}=(1.755)(8.68)=15.32,\mathrm{respectively}. \)
According to Eq. (3.14), the estimated Tallis (1985) vector of coefficients can be obtained as \( {\widehat{\mathbf{b}}}_{\mathrm{T}}={\widehat{\mathbf{b}}}_R+\widehat{\uptheta}\widehat{\boldsymbol{\updelta}} \), where \( {\widehat{\mathbf{b}}}_R=\widehat{\mathbf{K}}\widehat{\mathbf{b}} \) is the estimated RLPSI, \( \widehat{\boldsymbol{\updelta}}={\widehat{\mathbf{P}}}^{-1}\mathbf{C}{\left({\mathbf{C}}^{\prime }{\widehat{\mathbf{P}}}^{-1}\mathbf{C}\right)}^{-1}\mathbf{d} \), \( \widehat{\uptheta}=\frac{\widehat{{\mathbf{b}}^{\prime }}\mathbf{C}{\left({\mathbf{C}}^{\prime }{\widehat{\mathbf{P}}}^{-1}\mathbf{C}\right)}^{-1}\mathbf{d}}{{\mathbf{d}}^{\prime }{\left({\mathbf{C}}^{\prime }{\widehat{\mathbf{P}}}^{-1}\mathbf{C}\right)}^{-1}\mathbf{d}} \) is the estimated constant of proportionality, \( \widehat{\mathbf{b}}={\widehat{\mathbf{P}}}^{-1}\widehat{\mathbf{G}}\mathbf{w} \) is the estimated LPSI vector of coefficients, and \( {\mathbf{d}}^{\prime }=\left[{d}_1\kern0.5em {d}_2\kern0.5em \cdots \kern0.5em {d}_r\right] \) is the vector of predetermined restrictions.
In Sect. 3.1.4 of this chapter we described how to obtain \( {\widehat{\mathbf{b}}}_R=\widehat{\mathbf{K}}\widehat{\mathbf{b}} \), and we also obtained matrix \( {\mathbf{C}}^{\prime }={\mathbf{U}}^{\prime}\widehat{\mathbf{G}} \) for two and three null restrictions as \( {\mathbf{C}}_2^{\prime }={\mathbf{U}}_2^{\prime}\widehat{\mathbf{G}}=\left[\begin{array}{cccc}36.21& -12.93& 8.35& 2.74\\ {}-12.93& 13.04& -3.40& -2.24\end{array}\right] \) and \( {\mathbf{C}}_3^{\prime }={\mathbf{U}}_3^{\prime}\widehat{\mathbf{G}}=\left[\begin{array}{cccc}36.21& -12.93& 8.35& 2.74\\ {}-12.93& 13.04& -3.04& -2.24\\ {}8.35& -3.40& 9.96& 0.16\end{array}\right] \), whence the \( {\widehat{\mathbf{b}}}_R=\widehat{\mathbf{K}}\widehat{\mathbf{b}} \) values for two and three null restrictions were \( {\widehat{\mathbf{b}}}_{R_2}^{\prime }=\left[-0.164\kern0.5em 0.162\kern0.5em 0.680\kern0.5em 0.856\right] \) and \( {\widehat{\mathbf{b}}}_{R_3}^{\prime }=\left[-0.032\kern0.5em 0.136\kern0.5em 0.059\kern0.5em 0.890\right] \) respectively.
The \( \widehat{\uptheta} \) and \( \widehat{\boldsymbol{\updelta}} \) values for two and three predetermined restrictions were \( {\widehat{\uptheta}}_2=\frac{\widehat{{\mathbf{b}}^{\prime }}{\mathbf{C}}_2{\left({\mathbf{C}}_2^{\prime }{\widehat{\mathbf{P}}}^{-1}{\mathbf{C}}_2\right)}^{-1}{\mathbf{d}}_2}{{\mathbf{d}}_2^{\prime }{\left({\mathbf{C}}_2^{\prime }{\widehat{\mathbf{P}}}^{-1}{\mathbf{C}}_2\right)}^{-1}{\mathbf{d}}_2}=6.213 \), \( {\widehat{\uptheta}}_3=\frac{\widehat{{\mathbf{b}}^{\prime }}{\mathbf{C}}_3{\left({\mathbf{C}}_3^{\prime }{\widehat{\mathbf{P}}}^{-1}{\mathbf{C}}_3\right)}^{-1}{\mathbf{d}}_3}{{\mathbf{d}}_3^{\prime }{\left({\mathbf{C}}_3^{\prime }{\widehat{\mathbf{P}}}^{-1}{\mathbf{C}}_3\right)}^{-1}{\mathbf{d}}_3}=4.529 \), \( {\widehat{\boldsymbol{\updelta}}}_2^{\prime }={\left({\widehat{\mathbf{P}}}^{-1}{\mathbf{C}}_2{\left({\mathbf{C}}_2^{\prime }{\widehat{\mathbf{P}}}^{-1}{\mathbf{C}}_2\right)}^{-1}{\mathbf{d}}_2\right)}^{\prime }=\left[0.153\kern0.5em -0.052\kern0.5em 0.083\kern0.5em 0.024\right] \), and \( {\widehat{\boldsymbol{\updelta}}}_3^{\prime }={\left({\widehat{\mathbf{P}}}^{-1}{\mathbf{C}}_3{\left({\mathbf{C}}_3^{\prime }{\widehat{\mathbf{P}}}^{-1}{\mathbf{C}}_3\right)}^{-1}{\mathbf{d}}_3\right)}^{\prime }=\left[0.083\kern0.5em -0.038\kern0.5em 0.420\kern0.5em 0.005\right] \). With these results, the estimated Tallis (1985) vectors of coefficients for two and three predetermined restrictions were \( {\widehat{\mathbf{b}}}_{T_2}^{\prime }=\left[0.793\kern0.5em -0.159\kern0.5em 1.194\kern0.5em 1.004\right] \) and \( {\widehat{\mathbf{b}}}_{T_3}^{\prime }=\left[0.342\kern0.5em -0.035\kern0.5em 1.960\kern0.5em 0.914\right] \) respectively. These latter two vectors of coefficients are the same as the vectors of coefficients obtained using the Mallard (1972) method for two and three predetermined restrictions. These results corroborate that, in effect, the Mallard (1972) and Tallis (1985) PPG-LPSIs are the same.
With the data set described in Sect. 2.8.1 of Chap. 2 we constructed Table 3.4, which presents the estimated LPSI selection response and heritability, and the estimated PPG-LPSI selection response and heritability for one, two, and three predetermined restrictions for seven simulated selection cycles using a selection intensity of 10% (kI = 1.755). The averages of the estimated PPG-LPSI selection responses were 14.19, 14.00, and 12.58 for one, two, and three restrictions respectively. Note that 14.19 is also the average value for the estimated LPSI selection response. This means that the PPG-LPSI and the LPSI selection responses are the same for only one predetermined restriction. However, the estimated PPG-LPSI selection responses for two and three restrictions tend to decrease (Table 3.4). The same is true for the estimated PPG-LPSI heritability. That is, the estimated PPG-LPSI heritability for one predetermined restriction is equal to the estimated LPSI heritability. The estimated PPG-LPSI heritability for two predetermined restrictions decreased, but increased for three predetermined restrictions (Table 3.4). This is because the simulated true heritabilities of traits T1, T2, T3, and T4 were 0.4, 0.6, 0.6, and 0.8 respectively.
Table 3.5 presents the estimated LPSI expected genetic gain per trait without restrictions, and the estimated PPG-LPSI expected genetic gain per trait for one, two, and three predetermined restrictions for seven simulated selection cycles using a selection intensity of 10% (kI = 1.755). Once again, note that for one predetermined restriction, the estimated PPG-LPSI expected genetic gains were equal to the estimated LPSI expected genetic gains, and for two predetermined restrictions, the estimated PPG-LPSI expected genetic gains were similar to the estimated LPSI expected genetic gains; however, for three predetermined restrictions, the estimated PPG-LPSI expected genetic gains tended to decrease.
The first part of Table 3.6 presents the estimated correlation of the net genetic merit (H = w′g) with the estimated LPSI and RLPSI values for one, two, and three null restrictions. In addition, this first part presents the estimated LPSI versus RLPSI efficiency p = 100(λR − 1) (Eq. 2.21, Chap. 2). The second part of Table 3.6 presents the estimated correlation of H = w′g with the estimated LPSI and PPG-LPSI values for one, two, and three predetermined restrictions, and the estimated LPSI versus RLPSI efficiency p = 100(λP − 1). Finally, the third part of Table 3.6 presents the estimated variance of the predicted error (VPE) of the LPSI (\( \left(1-{\rho}_{HI}^2\right){\sigma}_H^2 \)), the RLPSI (\( \left(1-{\rho}_{HI_R}^2\right){\sigma}_H^2 \)), and the PPG-LPSI (\( \left(1-{\rho}_{HI_P}^2\right){\sigma}_H^2 \)) for one, two, and three restrictions for seven simulated selection cycles.
The estimated VPE of the RLPSI is higher than that of the LPSI and PPG-LPSI for one, two, and three restrictions for the seven simulated selection cycles; however, the estimated VPE of PPG-LPSI is only greater than that of the LPSI for two and three predetermined restrictions.
Thus, according to the results obtained for the LPSI, the RLPSI, and the PPG-LPSI, the best predictor of the net genetic merit was the LPSI followed by the PPG-LPSI and the RLPSI.
3.3 The Desired Gains Linear Phenotypic Selection Index
The most important aspect of the desired gains linear phenotypic selection index (DG-LPSI) is that it does not require economic weights. Note that the LPSI expected genetic gain per trait \( \mathbf{E}={k}_I\frac{\mathbf{Gb}}{\sigma_I} \) is maximized when b = P−1Gw and is proportional to kI and σI. Now let Gb be written as
where d is the vector of desired gains. From Eq. (3.21), E can be written as
Equation (3.22) indicates that E is inversely proportional to σI; then we can minimize σI with respect to b subject to the constraints Gb = d and then E is maximized (Brascamp 1984; Itoh and Yamada 1986). That is, we need to take the derivative of the function
with respect to b and v, where v is a vector of Lagrange multipliers, assuming that P, G, and d are known. The restriction Gb = d in Eq. (3.23) is similar to the Tallis (1985) restriction U′Gb = θd, but with U′ = I and θ = 1, or \( \uptheta =\frac{k_{\mathrm{I}}}{\sigma_I} \) (Tallis 1962).
It can be shown that the vector that minimizes σI and maximizes E can be written as
thus, in effect, as Gb = d, bDG = P−1G(GP−1G)−1d = P−1G(GP−1G)−1Gb = b. In Eq. (3.24) we are assuming that the traits in the index are the same as those in the net genetic merit. However, this may not be the case, that is, the number of traits could be different from the number of genotypes. In the latter case, Eq. (3.21) should be written as G′b = d and Eq. (3.24) as bDG = P−1G(G′P−1G)−1d (Itoh and Yamada 1986).
According to Itoh and Yamada (1986, 1988), Eq. (3.24) does not maximize the correlation between I and H (ρIH) nor the selection response because the covariance between I and H is not defined, given that Cov(H, I) = w′Gb requires the economic weight vector w′ and DG-LPSI does not use economic weights. However, note that because Gb = d, the variance of the DG-LPSI is Var(IDG) = d′(GP−1G)−1d = b′Pb.
In practice, d is chosen arbitrarily and then we are in the same situation as when economic weights need to be selected. Pesek and Baker (1969), Yamada et al. (1975), and Itoh and Yamada (1986, 1988) argued that this should not be a problem for experienced breeders because they must know the relative merits and demerits of their strains. However, this may be true only for some breeders and the selection of d is always subjective. Another problem with this index is that, as it is not associated with H = w′g, it is not a predictor of H = w′g.
3.4 Applicability of the LPSI, RLPSI, and PPG-LPSI
In the context of animal breeding, Hazel (1943) pointed out that because any index is constructed from data on a herd in one locality, it may not be widely applicable. The reasons for this are:
-
1.
Relative economic values for a trait may vary according to the particular locality or nature of the enterprise.
-
2.
The genetic constitution of herds may differ, especially when they are under distinctly nonrandom mating systems such as intense inbreeding.
-
3.
Different managerial practices may cause standard deviations for the traits to vary in different herds. The standard deviations for subjective traits such as market conformation measured by judging or by scores may vary because different judges vary the range over which they spread their scores.
-
4.
Few herds are large enough to provide enough data to make the sampling errors of the genetic constants small. These limitations are applicable to the LPSI, RLPSI, and PPG-LPSI, and to all selection indices described in this book.
References
Brascamp EW (1984) Selection indices with constraints. Anim Breed Abstr 52(9):645–654
Cerón-Rojas JJ, Crossa J, Sahagún-Castellanos J (2016) Statistical sampling properties of the coefficients of three phenotypic selection indices. Crop Sci 56:51–58
Cunningham EP, Moen RA, Gjedrem T (1970) Restriction of selection indexes. Biometrics 26(1):67–74
Harville DA (1975) Index selection with proportionality constraints. Biometrics 31(1):223–225
Hazel LN (1943) The genetic basis for constructing selection indexes. Genetics 8:476–490
Itoh Y, Yamada Y (1986) Re-examination of selection index for desired gains. Genet Sel Evol 18(4):499–504
Itoh Y, Yamada Y (1987) Comparisons of selection indices achieving predetermined proportional gains. Genet Sel Evol 19(1):69–82
Itoh Y, Yamada Y (1988) Selection indices for desired relative genetic gains with inequality constraints. Theor Appl Genet 75:731–735
James JW (1968) Index selection with restriction. Biometrics 24:1015–1018
Kabakoff RI (2011) R in action: data analysis and graphics with R. Manning Publications Co., Shelter Island, NY
Leon-Garcia A (2008) Probability, statistics, and random processes for electrical engineering, 3rd edn. Pearson Education, Upper Saddle River, NJ
Lin CY (2005) A simultaneous procedure for deriving selection indexes with multiple restrictions. J Anim Sci 83:531–536
Mallard J (1972) The theory and computation of selection indices with constraints: a critical synthesis. Biometrics 28:713–735
Pesek J, Baker RJ (1969) Desired improvement in relation to selection indices. Can J Plant Sci 49:803–804
Rao CR (2002) Linear statistical inference and its applications, 2nd edn. Wiley, New York
Schott JR (2005) Matrix analysis for statistics, 2nd edn. Wiley, Hoboken, NJ
Searle SR (1966) Matrix algebra for the biological sciences. Wiley, New York
Tallis GM (1962) A selection index for optimum genotype. Biometrics 18:120–122
Tallis GM (1985) Constrained selection. Jpn J Genet 60(2):151–155
Yamada Y, Yokouchi K, Nishida A (1975) Selection index when genetic gains of individual traits are of primary concern. Jpn J Genet 50(1):33–41
Author information
Authors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2018 The Author(s)
About this chapter

Cite this chapter
Céron-Rojas, J.J., Crossa, J. (2018). Constrained Linear Phenotypic Selection Indices. In: Linear Selection Indices in Modern Plant Breeding. Springer, Cham. https://doi.org/10.1007/978-3-319-91223-3_3
Download citation
DOI: https://doi.org/10.1007/978-3-319-91223-3_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-91222-6
Online ISBN: 978-3-319-91223-3
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)