
Abstract
Thinning is a frequently applied technique for producing skeletons from digital binary pictures in a topology-preserving way. Bertrand proposed a two-step thinning scheme that is based on P-simple points. In this paper, we give two sufficient conditions for topology-preserving reductions working on the three possible 2D regular grids. The new conditions combined with parallel thinning strategies and geometrical constraints yield a single-step thinning scheme that deletes solely P-simple points.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Various applications of image processing and pattern recognition are based on skeletons [11]. Thinning is an iterative layer-by-layer reduction: the border points of an object that satisfy certain topological and geometric constraints are deleted until only the skeleton of that object is left [4, 8].
A binary picture on a grid is a mapping that assigns a color of black or white to each grid element called point [8]. A regular partitioning of the 2D Euclidean space is formed by a tessellation of regular polygons (i.e., polygons having equal angles, and sides are all off the same length). There are exactly three polygons that can form such regular tessellations: the equilateral triangle, the square, and the regular hexagon [10]. Although 2D digital pictures sampled on the square grid are generally assumed, triangular and hexagonal grids also attract remarkable interest [8, 10].
A reduction transforms a binary picture only by changing some black points to white ones which is referred to as deletion [8]. Reductions play a key role in some topological algorithms, e.g., thinning [4, 7, 8].
Topology preservation is a major concern of reductions [7, 8]. In [7], Kong proposed some sufficient conditions for topology-preserving 2D reductions on the square grid, then the authors of this paper adapted his results to the hexagonal and triangular grids [5].
Bertrand introduced the notion of a P-simple point [1], and he proved that simultaneous deletion of P-simple points is topology-preserving. His concept can be used not only as a verification method but also as a methodology to design parallel thinning algorithms.
In this paper we prove that a reduction deletes only P-simple points if and only if it satisfies our previously published sufficient conditions for topology preservation [5] for the three possible regular 2D grids. Two new sufficient conditions for topology-preserving reductions are derived from our former conditions. Those new conditions provide a single-step (topology-preserving) thinning scheme with deletion of P-simple points.
2 Basic Notions and Results
In this paper, we use the fundamental concepts of digital topology as reviewed by Kong and Rosenfeld [8]. Despite the fact that there are other approaches based on cellular/cubical complexes [9], we consider here the ‘conventional paradigm’ of digital topology.
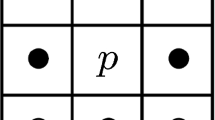
Let us denote by \(\mathcal{T}\), \(\mathcal{S}\), and \(\mathcal{H}\) the triangular, the square, and the hexagonal grids, respectively, and throughout this paper, if we will use the notation \(\mathcal V\), we will mean that \(\mathcal{V}\) belongs to \(\{ \mathcal{T}, \mathcal{S}, \mathcal{H} \}\). The elements of the considered grids (i.e., regular polygons) are called points. Two points are 1-adjacent if they share an edge and they are 2-adjacent if they share an edge or a vertex, see Fig. 1. Let us denote by \(N^\mathcal{V}_j(p)\) the set of points being j-adjacent to a point p in the grid \(\mathcal{V}\), and let \(N^{*\mathcal{V}}_j(p) = N^\mathcal{V}_j(p)\setminus \{p\}\) (\(j=1,2\)).

The considered adjacency relations on the three possible regular 2D grids. Points that are 1-adjacent to the central point p are marked “\(\bullet \)”, while points being 2-adjacent but not 1-adjacent to p are depicted by “\(\circ \)”.
A sequence of distinct points \(\langle p_0, p_1, \dots , p_m \rangle \) is called a j-path from \(p_0\) to \(p_m\) in a non-empty set of points \(X\subseteq \mathcal{V}\) if each point of the sequence is in X and \(p_i\) is j-adjacent to \(p_{i-1}\) for each \(i=1,2,\ldots ,m\). Two points are said to be j-connected in a set X if there is a j-path in X between them. A set of points X is j-connected in the set of points \(Y\supseteq X\) if any two points in X are j-connected in Y. A j-component of a set of points X is a maximal (with respect to inclusion) j-connected subset of X.
Let \((k,\bar{k})\) be an ordered pair of adjacency relations. Throughout this paper, it is assumed that \((k, \bar{k})\) belongs to \(\{ (1,2), (2,1) \}\). A \((k,\bar{k})\) binary digital picture is a quadruple \((\mathcal{V}, k, \bar{k}, B)\) [8], where set \(\mathcal{V}\) contains all points of the considered grid, \(B\subseteq \mathcal{V}\) denotes the set of black points, and each point in \(\mathcal{V}\setminus B\) is said to be a white point. A black component or object is a k-component of B, while a white component is a \(\bar{k}\)-component of \(\mathcal{V}\setminus B\).
A black point p is said to be a border point if p is \(\bar{k}\)-adjacent to at least one white point (i.e., \(N^{*\mathcal{V}}_{\bar{k}}(p)\setminus B \not = \emptyset \)). A border-point p is called an isolated point if all points in \(N^{*\mathcal{V}}_k(p)\) are white (i.e., \(\{p\}\) is a singleton object).
A reduction in a 2D picture is topology-preserving if each object in the input picture contains exactly one object in the output picture, and each white component in the output picture contains exactly one white component in the input picture [8].
A black point is said to be simple for a set of black points if its deletion is a topology-preserving reduction [7, 8]. In [5], the authors gave both formal and easily visualized characterizations of simple points in all the considered five types of pictures on the regular 2D grids (i.e., two for \(\mathcal{T}\), two for \(\mathcal{S}\), and one for \(\mathcal{H}\)). Note that the simpleness of p is a local property (i.e., it can be decided by examining \(N^{*\mathcal{V}}_2(p)\)), and only non-isolated border points may be simple [5].
In [5], the authors formulated the following unified sufficient conditions for topology-preserving reductions:
Theorem 1
[5] For any picture \((\mathcal{V}, k, \bar{k}, B)\), a reduction is topology-preserving if all of the following conditions hold.
-
1.
Only simple points for B are deleted.
-
2.
For any two \({\bar{k}}\)-adjacent black points, \(p,q\in B\) that are deleted, p is simple for \(B\backslash \{q\}\).
-
3.
If \((k,\bar{k}) = (2,1)\), no object is deleted completely, such that is composed by two or more mutually 2-adjacent points, and is not formed by two 1-adjacent points.
In order to construct topology-preserving reductions and provide a verification method, Bertrand proposed the notion of a P-simple point:
Definition 1
[1] Let \(Q\subset B\) be a set of black points in a picture. A point \(q\in Q\) is called a P-simple point for Q if q is simple for \(B{\setminus } R\) for any \(R\subseteq Q{\setminus }\{q\}\).
Bertrand gave a local characterization of P-simple points in (26, 6)-pictures on the 3D cubic grid [1], and Bertrand and Couprie reported a similar characterization in (2, 1)-pictures on the square grid \(\mathcal{S}\) [3]. Later, the authors of this paper presented both formal and easily visualized characterizations of P-simple points in all the considered five types of 2D pictures [6].
Bertrand’s approach provides the following sufficient condition for topology preservation:
Theorem 2
[1] A reduction that deletes a subset composed solely of P-simple points is topology-preserving.
3 Linking P-Simple Points and Our Sufficient Conditions
In this section, we show that the two kinds of conditions stated by Theorems 1 and 2 are equivalent.
Since the simpleness of a point is a local property, we can state the following proposition:
Proposition 1
Let \(Q\subset B\) be a set of points in a picture \((\mathcal{V}, k, \bar{k}, B)\). A point \(q\in Q\) is P-simple for Q if for any \(R\subseteq N^{*\mathcal{V}}_2(q)\cap Q\), q is simple for \(B{\setminus } R\).
Theorem 3
A reduction satisfies all conditions of Theorem 1 if and only if it deletes only P-simple points.
Proof
In order to prove the ‘if’ part, let us assume that a reduction deletes the set of P-simple points \(Q\subset B\) (for Q).
-
Let \(q\in Q\) be a point that is deleted by the reduction. Since \(\emptyset \subset Q\), by Definition 1, q is simple for \(B{\setminus }\emptyset = B\). Hence Condition 1 of Theorem 1 holds.
-
Let \(q_1, q_2\in Q\) be two \(\bar{k}\)-adjacent points that are deleted by the reduction in question. As \(\{q_2\}\subseteq Q{\setminus }\{q_1\}\), by Definition 1, \(q_1\) is simple for \(B{\setminus } \{q_2\}\), which means that Condition 2 of Theorem 1 is also fulfilled.
-
Let us assume that Condition 3 of Theorem 1 is violated. Hence there is an object Q (according to Condition 3 of Theorem 1) that is completely deleted by the reduction. Consider a point \(q\in Q\). Since the investigated reduction deletes only P-simple points, q is simple for \(B{\setminus }(Q\setminus \{q\})\) by Definition 1. Since q is an isolated (non-simple black) point for \(B{\setminus }(Q\setminus \{q\})\), we arrived at a contradiction.
Then we establish the ‘only if’ part for (1, 2)-pictures on \(\mathcal{S}\). Let us assume that a reduction satisfies all conditions of Theorem 1 and it deletes the set of points \(Q\subset B\) from a picture \((\mathcal{S}, 1, 2, B)\).
In [5], the authors gave easily visualized characterizations of simple points in all the considered five types of pictures by sets of matching templates. The four base matching templates assigned to (1, 2)-pictures on \(\mathcal{S}\) are depicted in Fig. 2.
Let \(p\in Q\). Since Condition 1 of Theorem 1 holds, p is simple for B. Without loss of generality, we may investigate only the four templates shown in Fig. 2.

The four base matching templates for characterizing a simple point p in (1, 2)-pictures on \(\mathcal{S}\). Notations: each black template position matches a black point; each white element matches a white point; each position depicted in gray matches either a white point or a black point. All the rotated and reflected versions of these four templates also match simple points.
By Proposition 1, the following cases are to be investigated:
-
(a)
Assume that p is matched by the template in Fig. 2a. In this case, only black point q is to be investigated. Since p is a non-simple (isolated black) point for \(B{\setminus }\{q\}\), by Condition 2 of Theorem 1, \(q\not \in Q\).
-
(b)
Assume that p is matched by the template in Fig. 2b. It can be readily seen that p is not simple for \(B{\setminus }\{s\}\). Hence, by Condition 2 of Theorem 1, \(s\not \in Q\). Let us investigate the remaining two black points q and r.
-
Assume that \(q\in Q\) and \(r\not \in Q\). Since p is matched by the template in Fig. 2a in \(B{\setminus }\{q\}\), p remains simple after the deletion of q.
-
Assume that \(r\in Q\) and \(q\not \in Q\). Since p is matched by the template in Fig. 2a in \(B{\setminus }\{r\}\), p remains simple after the deletion of r.
-
Assume that \(q\in Q\) and \(r\in Q\). Since q is not simple for \(B{\setminus }\{r\}\), and r is not simple for \(B{\setminus }\{q\}\), by Condition 2 of Theorem 1, we arrived at a contradiction.
-
-
(c)
Assume that p is matched by the template in Fig. 2c. It can be readily seen that p is not simple for \(B{\setminus }\{r\}\), \(B{\setminus }\{s\}\), and \(B{\setminus }\{u\}\). Hence, by Condition 2 of Theorem 1, the three points r, s, and u are not in Q. Let us investigate the remaining two black points q and t.
-
Assume that \(q\in Q\) and \(t\not \in Q\). Since p is matched by the template in Fig. 2b in \(B{\setminus }\{q\}\), p remains simple after the deletion of q.
-
Assume that \(t\in Q\) and \(q\not \in Q\). Since p is matched by the template in Fig. 2b in \(B{\setminus }\{t\}\), p remains simple after the deletion of t.
-
Assume that \(q\in Q\) and \(t\in Q\). Since p is matched by the template in Fig. 2a in \(B{\setminus }\{q,t\}\), p remains simple after the deletion of \(\{q,t\}\).
-
-
(d)
Assume that p is matched by the template in Fig. 2d. It can be readily seen that p is not simple for \(B{\setminus }\{q\}\), \(B{\setminus }\{r\}\), \(B{\setminus }\{s\}\), \(B{\setminus }\{u\}\), and \(B{\setminus }\{w\}\). Hence, by Condition 2 of Theorem 1, the five points q, r, s, u, and w are not in Q. Let us investigate the remaining two black points t and v.
-
Assume that \(t\in Q\) and \(v\not \in Q\). Since p is matched by the template in Fig. 2c in \(B{\setminus }\{t\}\), p remains simple after the deletion of t.
-
Assume that \(v\in Q\) and \(t\not \in Q\). Since p is matched by the template in Fig. 2c in \(B{\setminus }\{v\}\), p remains simple after the deletion of v.
-
Assume that \(t\in Q\) and \(v\in Q\). Since p is matched by the template in Fig. 2b in \(B{\setminus }\{t,v\}\), p remains simple after the deletion of \(\{t,v\}\).
-
Since p remains simple after the deletion of each subset of Q, p is a P-simple point for Q. Hence only P-simple points are deleted.
The proofs of the ‘only if’ part for the remaining four kinds of pictures can be carried out analogously with the help of matching templates given in [5]. \(\square \)
4 New Sufficient Conditions
Theorem 1 (i.e., our unified sufficient conditions for topology-preserving reductions) provides a method of verifying that a thinning algorithm always preserves topology. The following new conditions allow us to directly construct deletion rules for topological algorithms.
Theorem 4
For any picture \((\mathcal{V}, k, \bar{k}, B)\), a reduction \(\mathbf {R}\) satisfies all conditions of Theorem 1 if the following conditions hold for each point \(p\in B\) deleted by \(\mathbf {R}\):
-
1.
p is simple for B.
-
2.
For any \(q\in N^{*\mathcal{V}}_{\bar{k}}(p)\cap B\) that is simple for B, p is simple for \(B\backslash \{q\}\).
-
3.
If \((k,\bar{k}) = (2,1)\), p does not belong to an object that is composed by two or more mutually 2-adjacent points, and is not formed by two 1-adjacent points.
Proof
It can be readily seen that if \(\mathbf {R}\) satisfies Condition i of this theorem, Condition i of Theorem 1 is also satisfied for each \(i\in \{1,2,3\}\). \(\square \)
Let us consider the addressing schemes depicted in Fig. 3, which refer every point in the three possible regular 2D grids by a pair of coordinates. The lexicographical order relation ‘\(\prec \)’ between two distinct points \(p=(p_x,p_y)\) and \(q=(q_x,q_y)\) is defined as follows: \(\ p\prec q\ \Leftrightarrow \ ( p_y< q_y ) \vee ( ( p_y = q_y ) \wedge ( p_x < q_x ) )\). Let Q be a finite subset of \(\mathcal{V}\). Then, point \(p\in Q\) is said to be the smallest element of Q if for any \(q\in Q{\setminus }\{p\}\), \(p\prec q\).

Feasible addressing schemes for the three possible regular 2D grids.
Theorem 5
For any picture \((\mathcal{V}, k, \bar{k}, B)\), a reduction \(\mathbf {R}\) satisfies all conditions of Theorem 1 if the following conditions hold for each point \(p\in B\) deleted by \(\mathbf {R}\):
-
1.
p is simple for B.
-
2.
For any \(q\in N^{*\mathcal{V}}_{\bar{k}}(p)\cap B\) that is simple for B and \(p\prec q\), p is simple for \(B\backslash \{q\}\).
-
3.
If \((k,\bar{k}) = (2,1)\), p is not the smallest element of an object that is composed by two or more mutually 2-adjacent points, and is not formed by two 1-adjacent points.
Proof
It can be readily seen that if \(\mathbf {R}\) satisfies Condition i of this theorem, Condition i of Theorem 1 is also satisfied for each \(i\in \{1,2,3\}\). \(\square \)
The new sufficient conditions (i.e., Theorems 4 and 5) directly specify the following five pairs of reductions \((\mathbf {R}^{\mathcal{T},1,2}_{\hbox {sym}}, \mathbf {R}^{\mathcal{T},1,2}_{\hbox {asym}})\), \((\mathbf {R}^{\mathcal{T},2,1}_{\hbox {sym}}, \mathbf {R}^{\mathcal{T},2,1}_{\hbox {asym}})\), \((\mathbf {R}^{\mathcal{S},1,2}_{\hbox {sym}}, \mathbf {R}^{\mathcal{S},1,2}_{\hbox {asym}})\), \((\mathbf {R}^{\mathcal{S},2,1}_{\hbox {sym}}, \mathbf {R}^{\mathcal{S},2,1}_{\hbox {asym}})\), and \((\mathbf {R}^{\mathcal{H},1,2}_{\hbox {sym}}, \mathbf {R}^{\mathcal{H},1,2}_{\hbox {asym}}) = (\mathbf {R}^{\mathcal{H},2,1}_{\hbox {sym}}, \mathbf {R}^{\mathcal{H},2,1}_{\hbox {asym}})\), where \(\mathbf {R}^{\mathcal{V},k,\bar{k}}_{\hbox {sym}}\) deletes all points from a \((k,\bar{k})\) picture on \(\mathcal{V}\) that satisfy all conditions of Theorem 4, and \(\mathbf {R}^{\mathcal{V},k,\bar{k}}_{\hbox {asym}}\) deletes all points from a \((k,\bar{k})\) picture on \(\mathcal{V}\) that satisfy all conditions of Theorem 5.
The following proposition is an easy consequence of Theorems 3, 4, and 5:
Proposition 2
Reductions \(\mathbf {R}^{\mathcal{V},k,\bar{k}}_{\hbox {sym}}\) and \(\mathbf {R}^{\mathcal{V},k,\bar{k}}_{\hbox {asym}}\) delete only P-simple points.
Figure 4 is to illustrate the different behaviors of \(\mathbf {R}^{\mathcal{S},2,1}_{\hbox {sym}}\) and \(\mathbf {R}^{\mathcal{S},2,1}_{\hbox {asym}}\). It is important to emphasize the disparity between Conditions 2 and 3 of Theorems 4 and 5. Theorem 4 ensures symmetric conditions, since both \(\bar{k}\)-adjacent black points p and q are preserved if p is not simple after the deletion of q (in that case, q is not simple after the deletion of p, as well), and all ‘small’ objects composed by three or more mutually k-adjacent points remain unchanged. The conditions of Theorem 5 are asymmetric, since only the smallest elements of pairs of points and objects considered in Conditions 2 and 3 are preserved.

Comparison of reductions \(\mathbf {R}^{\mathcal{S},2,1}_{\hbox {sym}}\) (left) and \(\mathbf {R}^{\mathcal{S},2,1}_{\hbox {asym}}\) (right) for a (2, 1) picture on the square grid \(\mathcal{S}\). Non-simple points are marked ‘n’, and deleted (simple and P-simple) points are marked white stars. (Unmarked black points are simple but non-deleted points.)
5 A Single-Step 2D Thinning Scheme
In [2], Bertrand proposed a two-step (topology-preserving) thinning scheme that is based on P-simple points. One phase/reduction of the iterative thinning process is performed as follows:
-
1.
A set of points \(Q\subset B\) is (somehow) chosen and labeled.
-
2.
All P-simple points in Q are deleted (simultaneously).
Note that Step 2 deals with tricolor pictures (say: the value ‘0’ corresponds to white points, the value ‘1’ is assigned to the elements in \(B{\setminus } Q\), and value ‘2’ corresponds to points in Q). Hence that two-step scheme is both space- and time-consuming.
Proposition 2 provides a single-step (topology-preserving) thinning scheme with deletion of P-simple points. The deletion rule of a reduction of the iterative thinning process can be directly constructed by combining the reduction \(\mathbf {R}^{\mathcal{V},k,\bar{k}}_{\hbox {sym}}\) (or \(\mathbf {R}^{\mathcal{V},k,\bar{k}}_{\hbox {asym}}\)) with different thinning strategies (i.e., fully parallel, subiteration-based, and subfield-based [4]) and various geometric constraints (say endpoints [4]). The generated deletion rule is a common Boolean function that is to be evaluated for the neighborhood of the investigated points in binary (two-level) pictures. That Boolean function can be stored in a pre-calculated look-up-table, hence, the proposed single-step scheme can be implemented efficiently.
References
Bertrand, G.: On \(P\)-simple points. Compte Rendu de l’Académie des Sciences de Paris, Série Math. I(321), 1077–1084 (1995)
Bertrand, G.: \(P\)-simple points: a solution for parallel thinning. In: Proceedings of the 5th International Conference on Discrete Geometry for Computer Imagery, DGCI 2005, pp. 233–242 (1995)
Bertrand, G., Couprie, M.: Two-dimensional parallel thinning algorithms based on critical kernels. J. Math. Imaging Vis. 31, 35–56 (2008)
Hall, R.W.: Parallel connectivity-preserving thinning algorithms. In: Kong, T.Y., Rosenfeld, A. (eds.) Topological Algorithms for Digital Image Processing, pp. 145–179. Elsevier Science (1996)
Kardos, P., Palágyi, K.: On topology preservation in triangular, square, and hexagonal grids. In: Proceedings of the 8th International Symposium on Image and Signal Processing and Analysis, ISPA 2013, pp. 782–787 (2013)
Kardos, P., Palágyi, K.: Unified characterization of P-simple points in triangular, square, and hexagonal grids. In: Barneva, R.P., Brimkov, V.E., Tavares, J.M.R.S. (eds.) CompIMAGE 2016. LNCS, vol. 10149, pp. 79–88. Springer, Cham (2017). https://doi.org/10.1007/978-3-319-54609-4_6
Kong, T.Y.: On topology preservation in 2-D and 3-D thinning. Int. J. Pattern Recogn. Artif. Intell. 9, 813–844 (1995)
Kong, T.Y., Rosenfeld, A.: Digital topology: introduction and survey. Comput. Vis. Graph. Image Process. 48, 357–393 (1989)
Kovalevsky, V.A.: Geometry of Locally Finite Spaces. Publishing House, Berlin, Germany (2008)
Marchand-Maillet, S., Sharaiha, Y.M.: Binary Digital Image Processing - A Discrete Approach. Academic Press, Cambridge (2000)
Siddiqi, K., Pizer, S. (eds.): Medial Representations - Mathematics, Algorithms and Applications. Computational Imaging and Vision, vol. 37. Springer, Heidelberg (2008). https://doi.org/10.1007/978-1-4020-8658-8
Acknowledgments
This work was supported by the grant OTKA K112998 of the National Scientific Research Fund.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Palágyi, K., Kardos, P. (2018). A Single-Step 2D Thinning Scheme with Deletion of P-Simple Points. In: Mendoza, M., Velastín, S. (eds) Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications. CIARP 2017. Lecture Notes in Computer Science(), vol 10657. Springer, Cham. https://doi.org/10.1007/978-3-319-75193-1_57
Download citation
DOI: https://doi.org/10.1007/978-3-319-75193-1_57
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-75192-4
Online ISBN: 978-3-319-75193-1
eBook Packages: Computer ScienceComputer Science (R0)
