
Abstract
Large graphs are widely used in real world graph analytics. Memory available in a single machine is usually inadequate to process these graphs. A good solution is to use a distributed environment. Typical programming styles used in existing distributed environment frameworks are different from imperative programming and difficult for programmers to adapt. Moreover, some graph algorithms having a high degree of parallelism ideally run on an accelerator cluster. Error prone and lower level programming methods (memory and thread management) available for such systems repel programmers from using such architectures. Existing frameworks do not deal with the accelerator clusters.
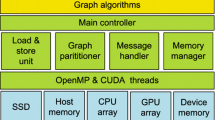
We propose a framework which addresses the previously stated deficiencies. Our framework automatically generates implementations of graph algorithms for distributed environments from the intuitive shared memory based code written in a high-level Domain Specific Language (DSL), Falcon. The framework analyses the intermediate representation, applies a set of optimizations and then generates Giraph code for a CPU cluster and MPI+OpenCL code for a GPU cluster. Experimental evaluations show efficiency and scalability of our framework.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Large scale graphs are generated and analyzed in various domains such as social networks, road networks, systems biology, and web graphs. Graph processing on a single machine becomes inefficient when the graph size exceeds the machine memory (due to high disk access latency). Graph processing is also inefficient because of irregular behaviour of graph algorithms. On the other hand, parallelism exhibited by graph algorithms improves performance [15]. To exploit the parallelism, modern distributed architectures such as multi-core CPU clusters and GPU clusters, are used.
In recent times, many frameworks for graph analytics in distributed environment such as Giraph [1], GraphLab [13], and PowerGraph [7], which target only multi-core CPU cluster, have been proposed. All these frameworks have their own specific unconventional programming style which is difficult for a programmer to comprehend and adopt.
To exploit the high degree of parallelism in graph algorithms, high performance compute resources such as GPUs are the most suitable targets. Moreover, large scale graph processing requires a distributed environment such as GPU clusters. Lower level APIs such as CUDA and OpenCL with Message Passing Interface (MPI) for communication among nodes facilitate programming in such environments. It is inconvenient for an amateur programmer to develop algorithms in such a language. A few challenges are summed up below.
-
Thread management: Deciding the total number of threads and thread block size, and synchronizing threads.
-
Memory management: Allocating and deallocating memory for a graph object and all its vertex and edge properties on GPU, copying a graph object to GPU from CPU and copying back the results.
-
Debugging: Manual thread management and memory management make a program error prone and difficult to debug.
-
Message passing: Deciding which data to communicate and to which nodes, preparing the data, and sending and receiving the data in appropriate buffers.
-
Global variables: Absence of shared memory forces each node to keep a separate copy of each global variable and synchronize it whenever any node modifies its copy.
This paper presents a scalable framework which addresses the above discussed challenges of large scale graph processing in a distributed environment, i.e., CPU cluster and GPU cluster. The framework uses the front-end of Falcon DSL [18]. The framework traverses the Abstract Syntax Tree (AST) generated by Falcon [18], applies a set of optimizations and then generates Giraph [1] code for a CPU cluster and MPI+OpenCL code for a GPU cluster. Since our framework uses the constructs of Falcon [18], the programmer enjoys conventional, imperative, and shared memory programming style.
Our key contributions are as follows.
-
We provide a multi-target code generator for any vertex-centric algorithm written in Falcon [18] that caters to CPU and GPU clusters.
-
The framework analyses the DSL code and decides the graph object properties to be communicated, sends the messages, and synchronizes received message data with local data. Thus, it hides the complexity of message passing from the programmer.
-
The framework applies a set of optimizations in order to minimize memory occupancy and communication latency.
-
Experimental evaluations on CPU and GPU clusters shows scalability and efficiency of our framework.
2 Related Work
Green-Marl [9] and its extensions [10, 16] target multi-core CPU, NVIDIA GPU and CPU cluster (Pregel [14]). Galois [12] provides C++ APIs to implement graph algorithms on a multi-core CPU. LonestarGPU [4] is a CUDA framework for graph algorithms and targets NVIDIA GPU. All of these DSLs and frameworks are either limited to a single node or do not target GPU cluster.
TOTEM [6] is a graph processing engine which targets hybrid architectures on a single node. It partitions the graph on multiple GPUs and CPU of a single node. Medusa [19] is a framework which generates graph algorithms implementations for multiple GPUs of a single node. Both, Totem and Medusa limit the graph size to the memory of the single node. Parallel Boost Graph Library [8] provides implementations of graph algorithms in a distributed environment. But it does not target GPU clusters.
There are many frameworks for graph processing in distributed environments, such as Pregel [14], Giraph [1], GraphLab [13], PowerGraph [7], GoFFish [17] etc. Pregel [14] and Giraph [1] adopt the Bulk Synchronous Parallel (BSP) model [5] and are scalable. Unlike Pregel [14], GraphLab [13] provides asynchronous and adaptive computation. It is suitable for graph algorithms where different parts of graph converge with dissimilar rates. PowerGraph [7] is an extended version of GraphLab [13]. It is desirable for natural graphs whose degree distribution follows a power law. GoFFish [17] is a sub-graph centric programming abstraction for distributed clusters. All these frameworks adopt unconventional programming models and target only CPU clusters. We generated code in Giraph because it offers high scalability. However, several other frameworks can also be targeted.
3 Background
3.1 Giraph
Giraph [1] is a scalable, efficient and fault-tolerant open-source implementation of Google’s Pregel [14]. The collection of JAVA APIs available in Giraph [1] is useful to a programmer to implement graph algorithms on a Hadoop cluster. Giraph [1] has the following features.
-
Bulk Synchronous Parallel model (BSP) [5] model: Giraph framework is built on the BSP model.
-
Vertex-centric: Giraph algorithms are implemented in the form of computation over vertices. Algorithmic logic is written in a single local compute function (BasicCompute.compute()) which runs on every vertex in parallel. This function gets executed iteratively, and the program terminates when no communication happens and all vertices become inactive.
However, it poses the following challenges from a programming perspective.
-
Programming in Giraph requires exclusive handling of global variables and graph object properties. A user must register them through an Aggregator in the global compute function (MasterCompute.compute()). Afterwards, these global variables and properties can be accessed and modified from both local and global functions.
-
Since Giraph allows only a single BasicCompute.compute(), managing multi-functions is a difficult task. A global variable has to be maintained in the MasterCompute.compute() function. Depending on the value of this variable apt function is chosen in the local compute function.
-
Programmer must explicitly implement message type through Message class and vertex properties through Vertex class.

Giraph random bipartite matching code
Figure 1 shows the partial implementation of random bipartite matching in Giraph. This algorithm is a three-step handshake algorithm. In the first step, the left vertex sends a message to the right vertex. In second step, the right vertex accepts the message from any one of the left vertices randomly, and sends an acknowledgement. One of the edges is matched in the third step. Global variable count, which can be modified by any vertex, is registered in the RBMMasterCompute class. Also, multi-functions call is handled through phase aggregator. Its value gets modified in MasterCompute.compute() method which is not shown here. We have also omitted the implementations of Vertex and Message class, and other methods for brevity.
3.2 Falcon
Falcon [18], a graph DSL, extends C programming language and helps programmers to implement graph analysis algorithms intuitively. The front-end of the Falcon [18] compiler generates an AST. The back-end traverses the AST and generates OpenMP annotated C code for multi-core CPU and CUDA code for NVIDIA GPU. Besides C data types, Falcon [18] has additional data types pertinent to graph algorithms such as graph, vertex, edge, set and collection. The user required to define parallelism explicitly through the parallel construct foreach.
4 Back-End of Our Framework
Our framework adopts the BSP model [5] where the computation of a graph algorithm occurs in a series of supersteps. Each superstep consists of the three following steps.
-
Computation: Each node runs a computation function parallelly and independently.
-
Communication: At the end of the computation, nodes communicate with each other.
-
Synchronization: Each node synchronizes its local data with the received data.
Our framework uses the front-end of the Falcon compiler [18]. Front-end of Falcon parses the DSL code and generates an AST which is input to the back-end of our framework. Back-end compilation occurs in two phases. In the first phase, the AST is traversed to get some essential information such as the vertex or edge property to be communicated and the program location for the communication. In the second phase, optimizations are applied and efficient code is generated in Giraph for CPU cluster and MPI+OpenCL for heterogeneous cluster. The DSL programmer can enable or disable optimizations through command line switches.
Graph Storage and Partitioning for a Heterogeneous Cluster. Generated code stores the graph in Compressed Sparse Row (CSR) format. CSR format offers less storage overhead and favors memory coalescing compared to edge list and adjacency list representations. It keeps two arrays: edges and indices. edges array stores the destination vertices and weights of outgoing edges of each vertex. All the outgoing edges of each vertex are stored contiguously. indices array stores the index of the first outgoing edge (stored in edges array) of each vertex.
By default, our framework partitions the graph vertex-wise using the METIS tool [11]. A programmer can also use his/her own partitioning strategies. Each vertex belongs to a specific cluster node depending on its partition-id. Figure 2 shows graph partitioning on three nodes and graph storage at Node2 in CSR format. The input graph, which is shared among all nodes of a cluster, is read in parallel.
Multiple copies of a vertex property are stored in order to keep the vertex’s property consistent across partitions. One master copy is stored at the node where the vertex belongs. Other copies (duplicate copies) reside at the nodes where the vertex is destination vertex of any inter-partition edge. As Fig. 2 suggests, the master copies of vertices v2 and v4 reside on Node2. Node2 also stores copies of vertices v3 and v5 whose master copies are stored at Node0 and Node1 respectively.

Graph and its storage on Node2

Falcon code and its equivalent generated Giraph and OpenCL code
4.1 Compilation for a GPU Cluster (MPI+OpenCL Code)
A heterogeneous cluster is composed of multiple nodes where each node can be any device such as CPU or accelerator, such as GPU, DSP, or FPGA. Usually, graph algorithms run on general purpose computing devices, i.e., CPU and GPU.
Typically, OpenMP is used to target the multi-core CPU nodes. CUDA is used to target the NVIDIA GPU nodes. But OpenCL is used to target both multi-core CPU and GPU devices of any vendor since it is an open, royalty-free, platform-agnostic and vendor-agnostic standard for programming on heterogeneous computation resources. Hence, we decided to generate code in OpenCL coupled with MPI which is a programming standard for a distributed architecture. Translations of some of the constructs are discussed below.
Parallel Regions: A Falcon programmer explicitly defines parallelism through the parallel construct foreach. Code enclosed in a foreach loop is translated to a kernel. The kernel will run in parallel on all local vertices. Since the execution of kernel comes under the computation step of the BSP model, it runs in parallel on all the nodes. Figure 3 shows the translation of foreach loop. t is a points iterator which iterates on all the vertices of the graph. Each vertex corresponds to a thread, and all threads execute the loop body in parallel. The code enclosed in the foreach loop is translated to a kernel fun1. The kernel is called with the size of total number of vertices (lines 8–9).
Global Property and Variable: In a shared memory architecture, the scope of global variables and properties associated with a graph runs throughout the program. But in a distributed architecture, there is no memory which is accessible from all the nodes of the cluster. Hence, memory is allocated on all the nodes for all the global variables and properties. Whenever such a variable gets updated on any node, its value is broadcast to all the other nodes. If the operation applied on a global variable is MIN, MAX, ADD or MUL, then it can be applied in any order since these operations are associative and commutative. But, when Assignment operator is applied on a global variable, it gets written non-deterministically in any order.
Communication and Synchronization: In order to carry out communication in a distributed environment, a programmer needs to figure out data, program location, and source and destination nodes for the communication. Our framework automatically generates code to handle these issues from Falcon code. In the first phase of compilation, the AST is traversed to find out the required information for communication.
If any property is modified in a kernel, then that property needs to be communicated to the neighbours, and communication happens after the call to the kernel that modifies the property. Communication occurs between two nodes only if there is any inter-partition edge between them.
After the communication, received data is synchronized with local data based on the kind of operation applied on the property in the kernel code. This synchronization code is also generated by our framework.
4.2 Compilation for a CPU Cluster (Giraph Code)
Parallel Region: The code enclosed in a foreach loop is translated to the BasicCompute.compute() function of Giraph (as shown in Fig. 3). This function executes conceptually in parallel on all the vertices of graph.
Global Variables and Properties: Giraph offers Aggregators to handle global variables. Its value can be modified from either BasicCompute.compute() or MasterCompute.compute() function. MasterCompute.compute() function gets executed in the beginning of every superstep. Graph properties or global variables in Falcon are mapped to the Aggregators of Giraph. The first phase of compilation determines the type of Aggregator based on the type of the operation applied on global variable or graph object property. Table 1 depicts the operations and their equivalent Aggregators.
Multi-functions: When multiple functions are called through parallel constructs in Falcon, they all are mapped to the same BasicCompute.compute() function. Our framework assigns numbers to all functions according to their calling order. Our framework also uses a current_fun variable (of type enum) to keep track of which function is being executed. Since current_fun is a global variable, it is modified through the SumAggregator. The MasterCompute .compute() function modifies the current_fun variable appropriately in the beginning of every superstep. Subsequently, BasicCompute.compute() function selects the function based on the value of current_fun variable.
Communication and Synchronization: Communication and synchronization are managed as stated in the GPU cluster compilation (Sect. 4.1).
5 Optimizations
5.1 Execute Only Active Vertices
Programmers often tend to write simple and unoptimized parallel code for traversal based graph algorithms that underperform and waste resources. However, better manual or optimized Falcon code can also be written.
In traversal-based graph algorithms, all the vertices do not remain active in each iteration. In the generated code, active vertices can be tracked and kernel can be executed only on those vertices. In order to achieve this, the compiler associates a boolean property is_Active with each vertex that stores the status of the vertex. Initially, all the vertices have their is_Active flags set to false except for the starting point. Whenever a vertex’s property gets updated, the status of that vertex is modified to active. When the execution of an active vertex is finished, its status is changed to inactive (false). The execution time of each iteration gets reduced because the number of active vertices is less than the total number of vertices. As a result, total execution time of the algorithm gets reduced significantly.
5.2 Discarding the Weight if Not Required
When a weighted graph is given as input to an algorithm that does not use the weight of an edge, storing the weight of edges does not serve any purpose. Falcon uses the function getWeight() to access the weight of an edge. While traversing the AST, our compiler notes whether this function is called anywhere or not. Subsequently, this information is propagated to the code generator. The code generator generates code with the graph storage format accordingly and also alters the READ function appropriately.  units of memory are required to store the graph G(V,E) in weighted CSR format while unweighted CSR format requires only
units of memory are required to store the graph G(V,E) in weighted CSR format while unweighted CSR format requires only  units of memory. Our compiler optimization saves
units of memory. Our compiler optimization saves  units of memory when the algorithm does not use weight of an edge. Thus larger graph can be accommodated on the given limited amount of memory. Furthermore, unweighted CSR format stores neighbors contiguously, unlike weighted CSR, where neighbors are stored alternatively. Thereby, it provides better cache locality and improves execution time.
units of memory when the algorithm does not use weight of an edge. Thus larger graph can be accommodated on the given limited amount of memory. Furthermore, unweighted CSR format stores neighbors contiguously, unlike weighted CSR, where neighbors are stored alternatively. Thereby, it provides better cache locality and improves execution time.
5.3 Communicate Selective Data
Vertex’s property has multiple copies as discussed in Sect. 4. One master copy is stored at the node where the vertex belongs. Other copies reside at the nodes where the vertex is the destination vertex of any inter-partition edge (referred here as duplicate copy). Whenever any duplicate copy is updated, that must be communicated to the master copy in order to preserve consistency. Some algorithms such as Pagerank update the duplicate copy in every iteration. However, other algorithms such as Single Source Shortest Path (SSSP) or Breadth First Search (BFS) do not update each duplicate copy in each iteration. Communicating all duplicate copies in each iteration is costly. Our optimization algorithm determines the updated duplicate copies and sends out only these. The compiler creates an extra copy of the property which stores previous value and compares it with the current value of the property to find out whether it is updated or not.
If an algorithm requires update of almost every duplicate copy in each iteration, then this optimization will not add any value and ends up performing slower than the unoptimized one (as illustrated in Table 4). Hence, this optimization has been made optional (through a command line switch).
6 Experimental Evaluations
Our framework generates Giraph code from Falcon code for a CPU cluster. It generates MPI+OpenCL for a heterogeneous cluster (OpenCL version 1.1). Table 2 shows the number of lines of code handwritten for Falcon, Giraph and MPI+OpenCL. Experiments on a GPU cluster have been carried out for five algorithms: BFS, SSSP, WCC, PR and RBM (Table 2). We used supercomputer Cray XC40 for experiments of the GPU cluster, where each node is having a NVIDIA Tesla K40 clocked at 706 MHz, with 2880 cores and 12 GB global memory. GPU cluster code is compiled with NVCC version 7.5. Experiments on CPU cluster are done for five algorithms: BFS, SSSP, PR, RBM and K-Core (Table 2). Our framework can generate code for any vertex-centric algorithm. An algorithm involving message-pulling can be indirectly supported in Giraph by storing all the in-neighbours of vertices. Graph mutation for GPU clusters is not supported in our framework. CPU cluster used for experiments consists of AMD CPUs, running Hadoop version 2.6.0. Each AMD CPU is an Opteron 6376 clocked at 1.40 GHz, with 8 cores and 32 GB RAM. K-Core algorithm mutates the graph structure and our framework for hybrid cluster does not support mutation of the graph. WCC algorithm is not implemented for CPU cluster because it involves message pulling, and Giraph does not directly support it.
Table 3 shows the input graphs used for experiments. Random and R-MAT graphs have been generated using the GTgraph tool [3]. We synthesized bipartite graphs using the random function.

Speedup over 2 nodes (MPI+OpenCL)

Speedup over 4 nodes (Giraph)
Figure 4 shows experimental evaluations on a GPU cluster with two, four and eight nodes. Time measured here for all the benchmarks includes only the computation and communication times after distributing the graph to the nodes. Speedup is shown with respect to two nodes. Figure 5 shows experimental evaluations on a CPU cluster with four, six, eight and ten nodes. Speedup is shown with respect to four nodes. Figures 4 and 5 show scalability of our framework. The scalability is not linear because with the increase in number of nodes of cluster, the computation time decreases but the communication time increases. Also, we have compared compiler generated code with manual implementations of the above mentioned algorithms for both CPU and heterogeneous cluster and found that they perform similarly.
Table 4 shows the execution time for two implementations of the SSSP and the PR algorithms, one with communicate-selective-data optimization and the other without it.
7 Conclusion
We proposed a framework for large scale graph processing on a distributed environment. It reuses the front-end of Falcon and generates Giraph implementations for a CPU cluster and MPI+OpenCL code for a heterogeneous cluster. Empirical results show scalability and efficiency of our framework.
References
Apache giraph project. http://giraph.apache.org
Distributed-falcon. https://github.com/niteshupadhyay/distributed-framework/
Bader, D.A., Madduri, K.: GTgraph: a synthetic graph generator suite. Atlanta, GA, February 2006
Burtscher, M., Nasre, R., Pingali, K.: A quantitative study of irregular programs on GPUs. In: Workload Characterization (IISWC), pp. 141–151. IEEE (2012)
Gerbessiotis, A.V., Valiant, L.G.: Direct bulk-synchronous parallel algorithms. In: Nurmi, O., Ukkonen, E. (eds.) SWAT 1992. LNCS, vol. 621, pp. 1–18. Springer, Heidelberg (1992). https://doi.org/10.1007/3-540-55706-7_1
Gharaibeh, A., Reza, T., Santos-Neto, E., Costa, L.B., Sallinen, S., Ripeanu, M.: Efficient large-scale graph processing on hybrid CPU and GPU systems. arXiv preprint arXiv:1312.3018 (2013)
Gonzalez, J.E., Low, Y., Gu, H., Bickson, D., Guestrin, C.: PowerGraph: distributed graph-parallel computation on natural graphs. In: OSDI, vol. 12, p. 2 (2012)
Gregor, D., Lumsdaine, A.: The parallel BGL: a generic library for distributed graph computations. In: POOSC (2005)
Hong, S., Chafi, H., Sedlar, E., Olukotun, K.: Green-Marl: a DSL for easy and efficient graph analysis. In: ACM SIGARCH Computer Architecture News, vol. 40, pp. 349–362. ACM (2012)
Hong, S., Salihoglu, S., Widom, J., Olukotun, K.: Simplifying scalable graph processing with a domain-specific language. In: CGO. ACM (2014)
Karypis, G., Kumar, V.: A fast and high quality multilevel scheme for partitioning irregular graphs. SIAM J. Sci. Comput. 20(1), 359–392 (1998)
Kulkarni, M., Pingali, K., Walter, B., Ramanarayanan, G., Bala, K., Chew, L.P.: Optimistic parallelism requires abstractions. ACM SIGPLAN Not. 42(6), 211–222 (2007)
Low, Y., Bickson, D., Gonzalez, J., Guestrin, C., Kyrola, A., Hellerstein, J.M.: Distributed GraphLab: a framework for machine learning and data mining in the cloud. Proc. VLDB Endow. 5(8), 716–727 (2012)
Malewicz, G., Austern, M.H., Bik, A.J., Dehnert, J.C., Horn, I., Leiser, N., Czajkowski, G.: Pregel: a system for large-scale graph processing. In: Proceedings of the 2010 ACM SIGMOD ICMD, pp. 135–146. ACM (2010)
Pingali, K., Nguyen, D., Kulkarni, M., Burtscher, M., Hassaan, M.A., Kaleem, R., Lee, T.H., Lenharth, A., Manevich, R., Méndez-Lojo, M., et al.: The tao of parallelism in algorithms. ACM Sigplan Not. 46(6), 12–25 (2011)
Shashidhar, G., Nasre, R.: LightHouse: an automatic code generator for graph algorithms on GPUs. In: Ding, C., Criswell, J., Wu, P. (eds.) LCPC 2016. LNCS, vol. 10136, pp. 235–249. Springer, Cham (2017). https://doi.org/10.1007/978-3-319-52709-3_18
Simmhan, Y., Kumbhare, A., Wickramaarachchi, C., Nagarkar, S., Ravi, S., Raghavendra, C., Prasanna, V.: GoFFish: a sub-graph centric framework for large-scale graph analytics. In: Silva, F., Dutra, I., Santos Costa, V. (eds.) Euro-Par 2014. LNCS, vol. 8632, pp. 451–462. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-09873-9_38
Unnikrishnan, C., Nasre, R., Srikant, Y.: Falcon: a graph manipulation language for heterogeneous systems. ACM TACO 12(4), 54:1–54:27 (2016)
Zhong, J., He, B.: Medusa: simplified graph processing on GPUs. TPDS 25(6), 1543–1552 (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Upadhyay, N., Patel, P., Cheramangalath, U., Srikant, Y.N. (2018). Large Scale Graph Processing in a Distributed Environment. In: Heras, D., et al. Euro-Par 2017: Parallel Processing Workshops. Euro-Par 2017. Lecture Notes in Computer Science(), vol 10659. Springer, Cham. https://doi.org/10.1007/978-3-319-75178-8_38
Download citation
DOI: https://doi.org/10.1007/978-3-319-75178-8_38
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-75177-1
Online ISBN: 978-3-319-75178-8
eBook Packages: Computer ScienceComputer Science (R0)