
Abstract
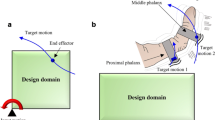
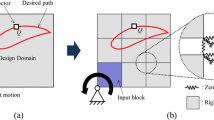
Although topology optimization methods can inspire designers, their use for the design of linkage mechanisms is not yet fully developed. However, there are a number of new mechanism design problems, as in robots or robotic rehabilitation devices. One of the critical limitations of earlier linkage mechanism synthesis methods by gradient-based topology optimization is that mechanisms only with one type of joint, a revolute joint, can be synthesized. The handling of revolute joints alone limits the capability of topology optimization considerably, and some mechanisms involving prismatic joints cannot therefore be synthesized. Here, we aim to develop a topology optimization method that can synthesize mechanisms with general joints including revolute and prismatic joints. The specific application in mind is the topology-optimization-based design of several robotic rehabilitation mechanisms. To this end, we propose a new ground model termed the joint element connected rigid-block model (JBM). The key idea of the proposed JBM is that the existence of prismatic joints and revolute joints are directly controlled by design variables. After testing the validity of the developed formulation with the JBM, we applied it to the design of a robotic finger rehabilitation device. An interesting design, not available in the existing literature, was synthesized, and the result may inspire designers in the field. It is expected that this method can be more useful as an inspirational design tool for the robotic industry in the future.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others
References
Kawamoto, A., Bendsoe, M.P., Sigmund, O.: Articulated mechanism design with a degree of freedom constraint. Int. J. Numer. Meth. Eng. 61(9), 1520–1545 (2004)
Ohsaki, M., Nishiwaki, S.: Generation of link mechanism by shape-topology optimization of trusses considering geometrical nonlinearity. J. Comput. Sci. Technol. 3(1), 46–53 (2009)
Kim, S.I., Kim, Y.Y.: Topology optimization of planar linkage mechanisms. Int. J. Numer. Meth. Eng. 98(4), 265–286 (2014)
Kim, Y.Y., Jang, G.-W., Park, J.H., Hyun, J.S., Nam, S.J.: Automatic synthesis of a planar linkage mechanism with revolute joints by using spring-connected rigid block models. J. Mech. Des. 129(9), 930–940 (2007)
Nam, S.J., Jang, G.-W., Kim, Y.Y.: The spring-connected rigid block model based automatic synthesis of planar linkage mechanisms: numerical issues and remedies. J. Mech. Des. 134(5), 051002-1–051002-11 (2012)
Han, S.M., Kim, S.I., Kim, Y.Y.: Topology optimization of planar linkage mechanisms generating paths without prescribed timing. Struct. Multidiscip. Optim. (in review)
Kang, S.W., Kim, S.I., Kim, Y.Y.: Topology optimization of planar linkage systems involving general joint types. Mech. Mach. Theory 104(5), 051002-1–051002-11 (2012)
Svanberg, K.: The method of moving asymptotes – a new method for structural optimization. Int. J. Numer. Meth. Eng. 24(2), 359–373 (1987)
Taheri, H., Rowe, J.B., Gardner, D., Chan, V., Gray, K., Bower, C., Reinkensmeyer, D.J., Wolbrecht, E.T.: Design and preliminary evaluation of the FINGER rehabilitation robot: controlling challenge and quantifying finger individuation during musical computer game play. J. Neuroeng. Rehabil. 11(10) (2014)
Robson, N., Soh, G.S.: Geometric design of eight-bar wearable devices based on limb physiological contact task. Mech. Mach. Theory 100, 358–367 (2016)
Acknowledgements
National Research Foundation of Korea (NRF) funded by the Ministry of Science, ICT & Future Planning, Korea (Numbers: 2016R1A2B3010231) contracted through IAMD (Institute of Advanced Machines and Design) at Seoul National University.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper

Cite this paper
Kang, S.W., Yu, J.H., Han, S.M., Kim, Y.Y. (2018). Topology Optimization of General-Joint Planar Linkage Mechanisms with an Application to Finger Rehabilitation Device Design. In: Schumacher, A., Vietor, T., Fiebig, S., Bletzinger, KU., Maute, K. (eds) Advances in Structural and Multidisciplinary Optimization. WCSMO 2017. Springer, Cham. https://doi.org/10.1007/978-3-319-67988-4_50
Download citation
DOI: https://doi.org/10.1007/978-3-319-67988-4_50
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-67987-7
Online ISBN: 978-3-319-67988-4
eBook Packages: EngineeringEngineering (R0)