
Abstract
Teleoperation system usage is challenging to human operators, as this system has a predominantly visual interface that limits the ability to acquire situation awareness, (e.g. maintain a safe teleoperation). This limitation coupled with the dual-task problem of teleoperating a mobile robot, negatively affects the operators cognitive load and motor skills. Our motivation is to offload some of the visual information to a secondary perceptual channel (haptic), by proposing an assisted teleoperation system. This system uses haptic feedback to alert the operator of obstacle proximity, without directly influencing the operator’s command inputs. The objective of this paper, is to evaluate and validate the efficacy of our system’s haptic feedback, by providing the obstacle proximity information to the operator. The user experiment was conducted to emulate the dual-task problem, by having a concurrent task for cognitive distraction. Our results showed significant differences in time to complete the navigation task and the duration of collisions, between the haptic feedback condition and the control condition.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others



Keywords
1 Introduction
Teleoperation of mobile robots is performed in non-line-of-sight conditions. It consists in a human operator controlling, through an interface, a mobile robot that is in a remote environment. As such, the teleoperation system interface becomes the only link between a human operator and the mobile robot, and its environment [1]. This means the interface is responsible for providing the necessary information about the robot status (e.g. camera position, battery life, sensors) and its surrounding environment (e.g. orientation, location, obstacles) [2, 3]. Hence, the capacity for the interface to provide relevant information in context, at the right moment and correct modality impacts the performance of the human operator, and his/her ability to acquire situational awareness [4].
Most of teleoperation interfaces are predominantly visual (e.g. [5,6,7]). This imposes perceptual limitation, and originates a decoupling of the physical environment from the natural human perceptual processing by compromising the human perception of affordances, scales, and motion [2]. This decoupling further affects the operator’s ability to control the robot, and acquire situational awareness (e.g. building mental models of remote environments, distance estimation and obstacle detection). Consequently, human operators usually feel a high level of disorientation, and are unable in most cases to discern the robot’s distance from an obstacle, leading to collisions [8, 9]. Therefore, teleoperation of mobile robots is challenging.
There has been research (e.g. [7], [10,11,12,13]) concerned with how to mitigate this decoupling, between the physical environment, where the robot is operating and the human perception of that environment. In order to improve human operators’ performance and lower their cognitive workload, while teleoperating the mobile robot. Particularly, in the field of haptic-feedback interfaces for mobile robot teleoperation. In the Lee et al. [14] study, it was shown that a combination of environmental and collision-preventing force significantly reduced the number of collisions compared to no haptic feedback stimulus, in both virtual and real environments. This combination of forces was also responsible for higher distance maintained from obstacles and lower average speeds on collision by participants, in both virtual and real environments. A study by Hacinecipoglu et al. [10] also showed a reduction in the number of collisions and time to complete the task. They also evaluated cognitive workload, with haptic feedback leading to a reduction of mental and temporal demand, as well as reducing the level of effort and frustration felt by participants. Their haptic feedback implementation actively adjusted the steering wheel to correct the navigation course of the mobile robot.
In Barros and Lindeman [15] research, the authors used a vibro-tactile feedback belt in the participant’s torso, as a haptic feedback, instead of the more widely used method of applying counter forces on the input control device. This vibro-tactile feedback belt was activated when the distance of an obstacle was d ≤ 1.25 m. Alerting participants of the direction and imminence of robot collision through vibration (intensity or frequency) on a specific region in the belt. Their results showed a significant decrease in the number of collisions with the vibro-tactile belt in comparison to not having haptic feedback.
In Brandt and Colton [16] one of the force feedback algorithms used was the Dynamic Parametric Field (DPF), which has four zones (safe, warning, transition, collision), these determine the force applied to the haptic input device. They defined these zones as:
-
Safe Zone – no haptic feedback is applied at a distance greater than dmax;
-
Warning Zone – force feedback increases from 0% to 60% for dmid < d < dmax;
-
Transition Zone – force feedback from 80% to 100% for dmin < d < dmid;
-
Collision Zone – 100% force feedback for d < dmin.
As with the previously mentioned work, this implementation of haptic feedback led to lower number of collisions and duration of collisions when compared to no feedback.
The current scientific understanding indicates that haptic feedback improves mobile robot teleoperation, in basic navigation tasks. By improving the situational awareness and performance of a human operator, which helps mitigate the decoupling of the physical environment from the natural human perceptual processing. Yet all these studies required specialized and prototypical devices to provide haptic feedback, with most of them acting directly on the operator’s input controllers. And they do not tackle the impact of using haptic-feedback in a typical dual-task set-up of mobile robot teleoperation [3].
Has stated, mobile robot teleoperation is typically a dual-task activity, be it in Urban Search and Rescue [17], surveillance and target acquisition [3], or explosive ordnance disposal [18]. This dual-task activity is comprised of:
-
controlling the robot - maintain operational effectiveness, avoid obstacles, check robot status, etc.;
-
accomplishing the objective - covers all aspects regarding the objectives for which the robot is being used (e.g. finding victims, defuse a bomb, search for target, etc.) [3].
With this paper, we first aim to describe our haptic feedback teleoperation system, that alerts a human operator of obstacle direction and proximity. This system relies on a modified DPF and a dynamic limitation algorithm of a robot’s maximum velocity. It also relies on a commercially available consumer gaming controller to provide input commands and haptic feedback information. This means the system is portable, and does not directly act upon the input controls that the operator uses. The rationale behind this implementation, is to allow operators, through the modulated haptic feedback, to quickly identify crucial obstacle distance zones, and let them decide what is the appropriate course of action. While the system mitigates the possible collision damage of the robot, and gives more time for the operator to make that decision.
The second purpose of this paper, is to evaluate and validate the efficacy of our developed haptic feedback system. In providing the obstacle proximity information to the operator, within the context of a dual-task mobile robot teleoperation. Based on previous results from other research, our hypothesis is that participants using the haptic feedback system will have an increase in navigational performance (shorter time to complete the task, lower number of collisions, and shorter duration of collision).
This paper’s novelty, lies in the fact that we test the impact of haptic feedback in human performance, in a mobile robot dual-task teleoperation activity. It also, contributes to the scientific understanding, that haptic feedback is beneficial without directly acting upon the input controls. As well as, proposing a hardware agnostic haptic feedback teleoperation system.
The paper is structured as follows. Section 2 discusses an overview of the proposed haptic feedback teleoperation system. Section 3 presents the experimental set-up and procedure of our user study with the proposed haptic feedback teleoperation system. The results of the user study are presented in Sect. 4. Sections 5 and 6 are the discussion of the results and the conclusion, respectively. There is also an appendix section with material used in the user study.
2 System Overview
This section describes both maximum velocity limitation (collision mitigation) algorithm, and haptic feedback feature (modified DPF and directional haptic feedback), of our teleoperation system. The collision mitigation is responsible for reducing the mobile robot’s maximum velocity, to increase the time a human operator has to avoid an obstacle. And in the eventuality of a robot colliding reduce the damage that occurs to the robot and environment. The haptic feedback feature is responsible for warning the human operator of obstacle proximity and direction to the mobile robot, so a human operator can safely navigate through an environment.
2.1 Collision Mitigation
This teleoperation system incorporates an active collision mitigation feature, that works for a priori known obstacles. The feature consists in limiting the robot’s maximum velocity in accordance to a modified dynamic parametric field (DPF). The idea is to give human operators increasingly more time to make a movement correction, since the maximum allowed velocity diminishes per shorter obstacle distances. And if a collision happens, it will be at lower velocities, thus in theory not causing major damage to the robot, nor the environment.
The active collision mitigation feature uses potential fields generated by the saturated variation of Fast Marching Square (FM2) [19], as a parameter in the velocity limitation algorithm. FM2 was chosen as it gives us the capacity to define propagation viscosity zones, on our initial tests, for a known environment. We modified the parameters of how the slowness map is generated, to make our system agnostic to the mobile robot platform.
We first use a modified DPF to define zones of viscosity, for the wave propagation of the saturated slowness map (SSM). The DPF is composed of three distinct propagation viscosity areas (Fig. 1), with obstacles as source of the wave:
-
Collision Zone – for d ≤ dmin the wave propagation velocity is 1/4.
-
Warning Zone – for dmin < d ≤ dmax the wave propagation velocity is 3/4.
-
Safe Zone – for d > dmax the wave propagation velocity is its maximum.

Example of a saturated slowness map; Collision Zone – blue, Warning Zone – green-yellow, Safe Zone – red (Color figure online)
where d is the distance from an obstacle,
kbuffer being a constant buffer distance, and
We chose these dimensions as they provide a reasonable influence space to warn the operator of obstacle proximity. These dimensions also allow us to easily set-up the system to any ground mobile robot, without the need to calculate the robot kinematics each time, as our intention is to obtain a closely related hardware agnostic system. The second modification of the SSM, is the saturation value for the Safe Zone,
where \( {\text{T}}_{{{\text{d}}_{\hbox{max} } }} \) is the time needed for the wave to reach dmax, and Tsaturated is the saturation value at each it is safe to navigate the robot.
To compute the maximum allowed velocity, we pair the SSM with the robot’s estimated position. We take a pessimistic approach to the location estimation uncertainty, by choosing the closest point to an obstacle boundary (from the location estimation point cloud), that returns a non-zero T value. Thus, maximum allowed velocity is given by
where VRM is the robot’s specified maximum velocity.
2.2 Haptic Feedback
The haptic feedback feature of our proposed teleoperation system builds on the DPF implementation proposed by Brandt and Colton [16]. As well as, directional force feedback proposed by Barros et al. [20].
-
1.
Dynamic parametric field (DPF): As with [16], our system begins to apply haptic feedback at distances equal or less than dmax from obstacles. And uses the DPF and SSM previously defined in the collision mitigation section, with two variations. The first variation is to obtain the T value, where we use the most probable estimated position for the robot. This variation is so that the haptic feedback intensity may reflect the actual distance that the robot is from the obstacles more accurately. The second variation proportionally inverts the T value for the haptic feedback intensity.
$$ {\text{Intensity}} = 100 - \left( {\frac{{{\text{T}} \times 100}}{{{\text{T}}_{\text{saturated}} }}} \right) , $$(5) -
2.
Directional haptic feedback: The haptic feedback was divided in three quadrants (Fig. 2): left, centre and right, instead of the 8 proposed in [20].
Fig. 2. 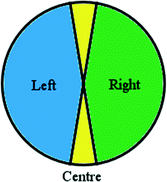
Directional haptic feedback quadrants: left and right total angle is π − 0.18 rads, Centre is 0.18 rads

We made this decision based on the static nature of the obstacles, and to simplify the operator’s awareness of obstacle direction in relation to the robot’s direction of motion. Therefore, the haptic feedback direction is computed by
with x, y being the current robot’s estimated position, ∇ϕ is the Eikonal equation for the SSM [19], and θHF is the robot’s current orientation.
An advantage of this haptic feedback teleoperation system is it opens the possibility to use robots that do not have proximity and range sensors (e.g. sonar, laser), and still provide directional haptic feedback to the human operator.
3 Experiment
To test our haptic feedback system an experiment was performed. To evaluate whether using haptic feedback to indicate obstacle proximity, improves the effectiveness of teleoperating a mobile robot, in a teleoperation dual-task activity. In this experiment the operator must navigate the mobile robot while concurrently performing a cognitive distractor task. In particular, we evaluated the time to complete the navigational task, the number of collisions, and duration of collision (duration the robot stays in contact with an obstacle). This setup is intended to simulate normal teleoperation activity of mobile robots, where operator focus is the mission objective (e.g. defuse a bomb, find victims, or target acquisition), with the navigation being a secondary task to accomplish the mission [3].
-
Hypothesis: Participants using the haptic feedback system will have an increase in navigational performance, compared to not having haptic feedback.
The details of the experimental setup are described in the following sections.
3.1 Participants
Twenty people voluntarily participated in the experiment. They were not compensated. Participants were aged between 17–40 (10 males, 10 females), where 4 completed high-school, 6 bachelor’s degree, 6 master’s degree, 2 doctoral degree, and 2 did not respond. Sixteen participants had driver’s license, with experience between 0.5–15 years. Seventeen participants had more than 5 years of experience playing videogames, one participant had between 2 to 5 years of experience with videogames, one participant 1 year experience of playing videogames, and one participant had never played any videogame prior to the experiment. In regards to current videogame playing frequency, 10 participants play irregularly, 3 play once every 6 months, 1 plays once a month, 2 participants play weekly, and 3 play videogames daily. All participants have had experience playing videogames with a gamepad. Two participants use a gamepad every time they play, 13 play with a gamepad sometimes, and 4 participants have played few times with a gamepad.
3.2 Design
The experiment involved one independent variable: feedback type (two levels: with haptic feedback (HF), no haptic feedback (NHF)). This was presented using an independent measures design – each participant was assigned randomly to one of the two conditions, while guaranteeing each group had a homogeneous distribution of gender. All participants were given a 10-min trial run to learn how to teleoperate the robot in a test map, prior to beginning the experiment.
3.3 Apparatus
Implemented System.
Our haptic feedback teleoperation system is implemented on the Robot Operating System (ROS) framework [21]. We use the Stage Robot Simulator [22] to simulate the mobile robot and the experimental environments. The simulated mobile robot is a Turtlebot2 from Open Source Robotics Foundation [23], by using the turtlebot_stage ROS package. For robot localization, we selected the Adaptive Monte Carlo Localization (amcl) package. The teleoperation system is running on Ubuntu 16.04 distribution with ROS Kinetic Karma.
The DPF values are: dmin = 50 cm = 35.4 + 14.6, dmax = 150 cm. We modified the Turtlebot2 maximum velocity to VRM = 3 m/s, to increase the probability of collisions and shorten the run time of the trial.
Simulation Environment.
We used two environment maps in this experiment. For the learning run the map used is 47.175 × 47.425 m, representing a 123.8 m long corridor with 10 easy bends. The corridor has a minimum width of 1.925 m and a maximum width of 5.125 m (Fig. 3).

Learning map
These dimensions were chosen so participants could easily and confidently learn how to control the Turtlebot2 robot. In the trial run, the map has 30 × 43.75 m, representing a cramped winding 131.625 m long path, where the narrowest part is 0.75 m and the widest part is 5.875 m (Fig. 4).

Trial map
This map was chosen to provide a challenging course for participants, with multiple turns and narrow passages.
To show participants the simulated environments Rviz was used (Fig. 5), with the following view settings: left and right panes collapsed; third person follower camera; yaw = π; distance = 0.58; focal point (x = 0.48, y = 0, z = 0.06); focal shape size = 0.25 and fixed; near clip distance = 0.01; target frame = base_link.

Rviz view
Display System.
To provide the operator with visual feedback the simulated environment is shown on a LG M2262D-PZ. This device features a screen with a diagonal size of 55.88 cm, and a resolution of 1920 × 1080. The simulation software was shown in full screen mode.
Input Device.
To teleoperate the simulated robot an Xbox One S Wireless Controller was used. It has 4 independent vibration motors, with 2 distinct vibration modes (rumble and impulse). So, when the Turtlebot2 robot was in the Safe Zone no vibration was felt on the controller. Within the Warning Zone the impulse vibration was activated on the respective side(s) (left, right, or both left and right corresponding to front or back). When in the Collision Zone the rumble vibration would also kick in, with the same distribution as the Warning Zone.
Physical Environment and Props.
The experiment took place in a meeting room, this space was selected to minimize outside distractions. The concurrent task was performed with the aid of printed 19 aptitude questionsFootnote 1. Testing numeric ability, abstract reasoning, and spatial ability (shape matching, group rotation, 2D shape combination, 3D cube views, and solid shapes). With the numeric ability and shape matching being open answer, the rest were multiple choice.
3.4 Procedure
Participants met the experimenter and were escorted to the experiment room. Participants then received the experimental instructionsFootnote 2 to review, and filled basic demographics (gender, age, driver’s license, driving experience, videogame experience, videogame play frequency, videogaming with gamepad experience, and gamepad use frequency), and recording consent form. The experimental procedures were also discussed orally and participants encouraged to ask questions.
Participants were then given the Xbox One S Wireless Controller and reviewed the control scheme to teleoperate the simulated robot. Afterwards, participants begun the 10-min learning run, getting accustomed to the robot’s behaviour with their input commands. Within the run, the participants were encouraged to collide with a wall to learn how the robot behaved and how they could get out of the situation. The intention was also for participants to notice the limiting of the robot’s maximum velocity, when they approached a wall. And if participants were from the HF group, they would feel the corresponding haptic feedback from the controller.
Upon completion of the learning run participants took a 1 min break. This was done so we could set up the trial run environment. Prior to beginning the trial run the video camera was set to record, and the run procedure was again explained to participants. It constituted in pressing the “view” button on the controller to begin the run, maintain pressed the “left shoulder” button to activate the Turtlebot2’s motors, use the “left thumbstick” to move forwards or backwards, and the “right thumbstick” to rotate the Turtlebot2 left or right. Upon crossing the finish line press the “menu” button to indicate the end of the trial run. Participants were also told the objective was to perform the navigation task, in the shortest amount of time with the fewest number of collisions. While simultaneous reading and answering the aptitude questions that were shown by the side of the monitor (Fig. 6).

Trial run - experiment set-up
For each question participants had 30 s to answer, after the fact the participant had to move to the next question. Participants also had the option to move to the next question before the time ran out, if they felt stuck. When the participant reached the final question, we would go back to the first unanswered question and continue from there, with this process being repeated until the finish line was reached.
After ending the trial run, participants filled out a post-experiment questionnaire handed to them.
3.5 Measures
The primary measures used in this study were, completion time of trial run, number of collisions, and duration of collision, with secondary measure being the post-experiment questionnaire. A third measure was the score of correct answers given in the concurrent task (aptitude test), and the number unanswered questions. Within each trial run, the simulation system would log the beginning and end time of the run, as well as the position of each collision and timestamps for the duration of each collision. These were measured in seconds of elapsed time. The post-experiment questionnaire was composed of 8 questions. The first 7 questions with answers being provided by a semantic differential rating scale that range from 1 (very negative opinion) to 7 (very positive opinion). These questions ranged from collision awareness, turning awareness, location awareness, and usefulness of limitation of maximum velocity (see Appendix). The eighth question was for comments and opinions. The aptitude test answer scores were:
-
complete correct answer - 1 point;
-
incomplete correct answer for a question with multiple answers - (number of correct answers)/(total number of answers) points;
-
wrong answer – 0 points.
4 Results
A bilateral Mann-Whitney U analysis of the two groups demographic information showed they are equivalent (\( {\text{p}}_{\text{genre}} = {\text{p}}_{{{\text{academic}}\,{\text{level}}}} = {\text{p}}_{{{\text{driver}}\,{\text{license}}}} = {\text{p}}_{{{\text{plays}}\,{\text{vg}}}} = {\text{p}}_{{{\text{time}}\,{\text{playing}}\,{\text{vg}}}} = {\text{p}}_{{{\text{vg}}\,{\text{g}}}} = 1, \) \( {\text{p}}_{\text{age}} = 0.5401, \) \( {\text{p}}_{{{\text{driver}}\,{\text{time}}}} = 0.715, \) \( {\text{p}}_{{{\text{vg}}\,{\text{frequency}}}} = 0.703, \) \( {\text{p}}_{{{\text{vg}}\,{\text{gamepag}}\,{\text{frequency}}}} = 0.607 \)).
Analysing the trial run completion time (Fig. 7) led to significant differences between conditions (t18 = 2.654, p = 0.016; 97% CI, 23.6–413.1).

Time to complete the trial run
We used an independent measures T-test, with grouping variable feedback type, as we can assume sample normality for HF condition \( \left( {{\text{W}}_{(10)} = 0.904,{\text{p}} = 0.245} \right) \) and NHF condition \( \left( {{\text{W}}_{(10)} = 0.945,{\text{p}} = 0.6097} \right) \) from the Shapiro-Wilk W test [24]. The average completion time for participants in the HF condition was 3 min and 38 s faster than the average completion time for participants in the NHF condition.
The number of collisions (Fig. 8) did not led to any significant differences between the HF and NHF groups \( \left( {{\text{U}} = 32.5,{\text{n}}_{\text{HF}} = {\text{n}}_{\text{NHF}} = 10,{\text{p}} = 0.0987} \right) \), in one-tailed Mann-Whitney U test for discrete values [25]. Yet, a trend was observed, where participants of the HF group had fewer collision (median = 5.5) than those of NHF group (median = 15).

Number of collisions
In our duration of collision sample data (Fig. 9) we have some outliers in both conditions, these are valid dataset occurrences. The outliers happened due to the complete loss of awareness by the participants, and on which way they should move the robot to stop colliding with the wall. The outliers also took place when the participants were not being aware of colliding with the wall, thus continuing to touch the wall while moving through the path. These outliers compromise the comparison between the HF and NHF conditions, with that in mind we used the simple approach of not considering them for the analysis. We labelled the outliers for HF (Lower bound = −7.8 s, Upper bound = 13.8 s) and NHF (Lower bound = −17.415 s, Upper bound = 29.565 s) with a multiplier of g = 2.2 [26, 27]. We cannot assume sample normality for HF condition (W(10) = 0.872, p < 0.001) and NHF condition (W(10) = 0.841, p < 0.001) from the Shapiro-Wilk W test. The analysis of duration of collision shows a significant difference between HF and NHF (U = 3397.5, nHF = 71, nNHF = 128, p = 0.0016), in one-tailed Mann-Whitney U test [25]. Where the HF group had a significant shorter duration of collision than the NHF group.

Durations of collisions
Analysing the post-experiment questionnaire answers (Fig. 10) there is no visible difference between the HF and NHF group responses.

Post-experiment questionnaire answers
Interestingly, more than half of the participants in both the HF and NHF groups responded that they were at some level aware of colliding both in front and on the lateral sides. But all of them responded to not having any or almost any level of back collision awareness (participant answers had only the values of 1 or 2 in both conditions). In the turning point awareness question, at least half of the participants in both conditions responded that they had some difficulty in judging when to make a turn. Sixty percent (HF) and 70% (NHF) of participants answered they were not always aware of their location. Half of the participants in both conditions, found some degree of usefulness in the variable limitation of the robot’s maximum velocity. Only 20% of the HF participants responded that they were mostly not aware of the direction of travel, which contrasts with 40% of the participants in the NHF group.
A between groups analysis of the aptitude scores and number of unanswered questions was not possible, as there exists an association between the two measures (rHF = 0.933 and rNHF = 0.324) (Fig. 11).

Relation between aptitude scores and number of unanswered questions
From the trial run completion time and duration of collision significant results, we can substantiate our hypothesis. As a result, adding haptic feedback to inform the operator of wall proximity, significantly improves the time to complete a navigation task and diminishes the duration of collisions, when the focus is on a concurrent task.
5 Discussion
The current study sought to investigate the efficacy of indicating obstacle proximity through haptic feedback, in a teleoperation activity where the operator’s focus of attention is on a secondary task (answering an aptitude questionnaire). By making a comparison with a control condition where haptic feedback is absent. The choice of this experimental setup, was motivated by the scenarios of mobile robotic teleoperation in bomb disposal, urban search and rescue, and target acquisition.
Our findings confirm our hypothesis, the inclusion of haptic feedback to inform the operator of obstacle proximity improves navigational task performance. Our results showed a significant reduction of navigation completion time, in average by 3 min and 38 s compared to the NHF condition. As well as, decreasing the amount of time that the operator’s robot stays in collision with a wall. These results can be explained by an augmentation of situation awareness provided by the haptic feedback, while the visual focus is on the concurrent task. Thus, we corroborate the findings in [14,15,16]. In contrast with these previous study findings, our results did not show any significant difference in the number of collisions between groups. But a trend can be observed that points towards it. On the other hand, our results led to a significant improvement of task completion time in line with Hacinecipoglu et al. [10], but was not present on these studies [14,15,16]. This inversion of results is probably due to the difference in the experimental setup and haptic feedback, since we added a secondary task and the haptic feedback was not directly influencing the input commands.
To the best of our knowledge, our study is the first to demonstrate that the haptic feedback improves operator teleoperation efficacy, even when the operator’s focus is on a concurrent task. We also prove the viability of using haptic feedback to indicate obstacle direction and proximity distance, without acting directly on the input commands (but rather through the body of a commercially available gaming controller). Our results can drive future development in portable mobile robot teleoperation interfaces to integrate haptic feedback, in order to increase operator performance.
The reported absence of significant differences in the number of collisions between HF and NHF, is most likely due to the small number of participants (10 in each group), as opposed to the 20 participants used in the Lee et al. [14] study. It is important to note that even with this small number of samples a trend in favour of using haptic feedback emerged.
The absence of any significant difference in the post-experiment survey between groups, might be due to participants giving more focus to the concurrent task, and thus feeling they were consciously out of touch with what was going on with the robot. Another possibility is participants did not experience both conditions, thus did not have any prior frame of reference to compare with.
The aptitude test results were not viable for analysis, due to the inconsistent nature of the process. Since participants had the option of moving to the next question, and thus being able to revisit those questions multiple times, it also meant that some participants saw more questions and had more accumulated time with each question due to their longer trial run time. In contrast, the opposite happening to the participants with shorter trial run times, who never saw all the questions. This was a shortcoming of the experimental setup, with no clear way of solving it. Nevertheless, it is important to mention that all participants tried to answer the highest number of questions possible, their focus of attention throughout the trial run was the aptitude test. Thus, the aptitude test was a successful distractor task.
Our findings indicate a time benefit for completion of task and duration of collisions, when wall proximity haptic feedback is present in a static dual-task teleoperation activity.
6 Conclusion
Within this paper, we presented the implementation of our haptic feedback teleoperation system. Which warns a human operator of obstacle direction and proximity, through the vibration in a gaming controller. We also describe the user study and respective results, done on the efficacy of the haptic feedback teleoperation system, in a dual-task teleoperation scenario.
Our system has the advantage of being hardware agnostic. Meaning it can be used with most ground mobile robot platforms, even if they do not have proximity nor range sensors. And can also be used with a large variety of haptic feedback devices. The approach we took to implement a collision detection system can be easily applicable in telepresence scenarios, where a mobile robot is used within an office space, since the environment is mostly static and known (e.g. Double robot from Double robotics).
We then tested the effectiveness of our system, through a teleoperation dual-task user study in a simulated virtual environment. To our knowledge, this is the first study that tested the effectiveness of haptic feedback in a dual-task teleoperation condition. From the user study, we conclude that haptic feedback improves human operator performance, in dual-task teleoperation activities where the remote environment is static. Furthermore, the navigational performance improvement, both in task completion time and in collision duration reduction, occurs in a situation where participant focus is in a distractor task and has no prior knowledge of the remote environment (in our case a static environment).
As an initial study on the use of haptic feedback in a dual-task teleoperation activity, this paper’s results support the hypothesis that haptic feedback is beneficial to human operator safe teleoperation of robots. The work presented on this paper will serve as a basis for our future work. Our next steps will be to adapt the current system to be used in an unknown dynamic remote environment. To accomplish this, we intend to use a Simultaneous Localization and Mapping algorithm coupled with the mobile robot’s laser and odometry, to obtain in real time the layout of the remote environment and obstacles. Then with each update to the generated map, we will run the Fast Marching Square (FM^2) algorithm to generate a Saturated Slowness Map. With this approach, it will be possible to test our system in real world situations where the environment is previously unknown and dynamic.
References
Bejczy, A.K.: Teleoperation, telerobotics. In: The Mechanical Systems Design Handbook, Pasadena, California, vol. 3, no. 2, pp. 205–214 (2001)
Chen, J.Y.C., Haas, E.C., Barnes, M.J.: Human performance issues and user interface design for teleoperated robots. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 37(6), 1231–1245 (2007). doi:10.1109/TSMCC.2007.905819
Trouvain, B.: Teleoperation of unmanned vehicles: the human factor (2006)
Adamides, G., Christou, G., Katsanos, C., Xenos, M., Hadzilacos, T.: Usability guidelines for the design of robot teleoperation: a taxonomy. IEEE Trans. Hum.-Mach. Syst. 45(2), 256–262 (2015)
Sanguino, T.J.M., Márquez, J.M.A., Carlson, T., Millán, J.D.R.: Improving skills and perception in robot navigation by an augmented virtuality assistance system. J. Intell. Robot. Syst. Theory Appl. 1–12 (2014)
Chua, W.L.K., Johnson, M., Eskridge, T., Keller, B.: AOA: ambient obstacle avoidance interface. In: Proceedings of IEEE International Workshop on Robot and Human Interactive Communication, vol. 2014, no. October, pp. 18–23 (2014)
Reveleau, A., Ferland, F., Labbé, M., Létourneau, D., Michaud, F.: Visual representation of sound sources and interaction forces in a teleoperation interface for a mobile robot. J. Hum.-Robot Interact. 4(2), 1 (2015)
Yanco, H.A., Drury, J.: ‘Where am i?’ acquiring situation awareness using a remote robot platform. In: 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No. 04CH37583), vol. 3, pp. 2835–2840 (2004)
Nielsen, C.W., Goodrich, M.A., Ricks, R.W.: Ecological interfaces for improving mobile robot teleoperation. IEEE Trans. Robot. 23(5), 927–941 (2007)
Hacinecipoglu, A., Konukseven, E.I., Koku, A.B.: Evaluation of haptic feedback cues on vehicle teleoperation performance in an obstacle avoidance scenario. In: 2013 World Haptics Conference, WHC 2013, pp. 689–694 (2013)
Dragan, A.D., Srinivasa, S.S.: Online customization of teleoperation interfaces. In: Proceedings of IEEE International Workshop on Robot Human Interactive Communication, pp. 919–924 (2012)
Quintas, J., Almeida, L., Sousa, E., Menezes, P.: A context-aware immersive interface for teleoperation of mobile robots (2015)
Hou, X., Mahony, R., Schill, F.: Comparative study of haptic interfaces for bilateral teleoperation of VTOL aerial robots. IEEE Trans. Syst. Man Cybern. Syst. 46(10), 1352–1363 (2016)
Lee, S., Sukhatme, G., Kim, G.J., Park, C.-M.: Haptic teleoperation of a mobile robot: a user study. Presence Teleoperators Virtual Environ. 14(3), 345–365 (2005)
de Barros, P.G., Lindeman, R.W.: Multi-sensory urban search-and-rescue robotics: improving the operatoror’s omni-directional perception. Front. Robot. AI 1, 1–15 (2014)
Brandt, A.M., Colton, M.B.: Haptic collision avoidance for a remotely operated quadrotor UAV in indoor environments. In: 2010 IEEE International Conference on Systems, Man and Cybernetics, pp. 2724–2731 (2010)
Casper, J., Murphy, R.R.: Human-robot interactions during the robot-assisted urban search and rescue response at the world trade center. IEEE Trans. Syst. Man Cybern. Part B Cybern. 33(3), 367–385 (2003)
Ryu, D., Hwang, C.S., Kang, S., Kim, M., Song, J.B.: Wearable haptic-based multi-modal teleloperation of field mobile manipulator for explosive ordnance disposal. In: IEEE International Workshop on Safety, Security and Rescue Rototics, pp. 98–103 (2005)
Valero-Gomez, A., Gomez, J.V., Garrido, S., Moreno, L.: The path to efficiency: fast marching method for safer, more efficient mobile robot trajectories. IEEE Robot. Autom. Mag. 20(4), 111–120 (2013)
De Barros, P.G., Lindeman, R.W., Ward, M.O.: Enhancing robot teleoperator situation awareness and performance using vibro-tactile and graphical feedback. In: Proceedings of 2011 IEEE Symposium on 3D User Interfaces, 3DUI, pp. 47–54 (2011)
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T., Leibs, J., Berger, E., Wheeler, R., Mg, A.: ROS: an open-source robot operating system. ICRA 3(3), 5 (2009)
Hedges, R.: Stage (2008). http://playerstage.sourceforge.net/index.php?src=stage. Accessed 24 Sept 2016
Open source robotics foundation: TurtleBot (2016). http://www.turtlebot.com/. Accessed 24 Sept 2016
Royston, J.P.: Algorithm AS 181: the W test for normality. Appl. Stat. 31(2), 176 (1982)
Conover, W.J.: Practical nonparametric statistics. Statistician 22, 309–314 (1971)
Tukey, J.W.: Exploratory data analysis. Analysis 2(1999), 688 (1977)
Hoaglin, D.C., Iglewicz, B.: Fine-tuning some resistant rules for outlier labeling. J. Am. Stat. Assoc. 82(400), 1147–1149 (1987)
Acknowledgment
The work described in this paper was carried out with the support of ARDITI – Agência Regional para o Desenvolvimento da Investigação Tecnologia e Inovação under Project M1420 - 09-5369-FSE-000001- PhD Scholarship, whose support we gratefully acknowledge. This work was also supported from Fundação para a Ciência e a Tecnologia (FCT, Portugal), through project UID/EEA/50009/2013. This research has been funded through ERAChair Grant Agreement 621413.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
Post-experiment Questionnaire

Rights and permissions
Copyright information
© 2017 IFIP International Federation for Information Processing
About this paper
Cite this paper
Corujeira, J., Silva, J.L., Ventura, R. (2017). Effects of Haptic Feedback in Dual-Task Teleoperation of a Mobile Robot. In: Bernhaupt, R., Dalvi, G., Joshi, A., K. Balkrishan, D., O'Neill, J., Winckler, M. (eds) Human-Computer Interaction – INTERACT 2017. INTERACT 2017. Lecture Notes in Computer Science(), vol 10515. Springer, Cham. https://doi.org/10.1007/978-3-319-67687-6_18
Download citation
DOI: https://doi.org/10.1007/978-3-319-67687-6_18
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-67686-9
Online ISBN: 978-3-319-67687-6
eBook Packages: Computer ScienceComputer Science (R0)