
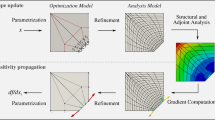
Abstract
We discuss recent constructive parametrizations approaches for implicit systems, via systems of ordinary differential equations. We also present the notion of generalized solution, in the critical case and indicate some numerical examples in dimension two and three, using MatLab. In shape optimizations problems, using this method, we introduce general optimal control formulations in the boundary observation case. This extends previous work of the authors on optimal design problems with distributed cost functional.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The implicit function theorem or the inverse function theorem ensure as well the local existence of implicit parametrizations for the solution of implicit systems, under classical assumptions, [2, 3]. Recently, in authors’ papers, [8, 14], explicit constructions (via iterated ordinary differential equations) of implicit parametrizations, in dimensions two and three, have been discussed. A possible extension of such constructions to arbitrary dimension is investigated in the preprint [15]. Moreover, this new approach allows the introduction of the notion of generalized solution, solving implicit systems under \(C^1\) hypotheses, in the critical case.
Such considerations have impact in shape optimization problems (fixed domain methods) where implicit representations of domains play an essential role. The aim is to obtain a general method to solve optimal design problems via optimal control theory. In the case of Dirichlet boundary conditions, a theoretical analysis together with numerical experiments are reported in [5, 7]. For a general background, we quote [6]. Notice that this method is essentially different from the level set method (for instance, no Hamilton-Jacobi equation is necessary in [5, 7]).
This paper is organized as follows. In Sect. 2, we recall briefly the implicit parametrization approach. Some numerical examples in the critical case, in dimension two and three are outlined in Sect. 3. The last section discusses possible applications in shape optimization.
2 Implicit Parametrizations and Generalized Solution
We limit the presentation to the case of one implicit equation in dimension three:
\(\varOmega \) an open connected subset. We assume that \(f\in \mathcal {C}^1(\varOmega )\) and there is \((x^0,y^0,z^0)\in \varOmega \) such that (1) is satisfied. We also impose, for the moment, that \((x^0,y^0,z^0)\) is noncritical for f, i.e. \(\nabla f(x^0,y^0,z^0)\ne 0\). To fix ideas, we assume:
Later, we shall remove this hypothesis and discuss the critical case. For the general situation, we quote [15].
We associate to (1) the following systems of first order partial differential equations (with independent variables t and s) of iterated type:
The iterated character of the PDE system (3)–(6) consists in the fact that the coupling between (3)–(6) is made just via the initial conditions (6). This very weak coupling, together with the presence of just one derivative in each equation create the possibility to solve (3)–(6) as ODE systems. Namely, the system (3)–(4) is indeed of ODE type. The system (5)–(6) has the t independent variable as a parameter, entering via the initial conditions and may be interpreted as an ODE system with parameters. The existence may be obtained via the Peano theorem since \(f\in \mathcal {C}^1(\varOmega )\). Moreover, one may infer via this theorem and some simple calculations that the local existence interval \(I_2(t)\) may be chosen independently of \(t\in I_1\), i.e. \(I_2(t)=I_2\). Under slightly stronger regularity assumptions, for instance \(\nabla f\) locally Lipschitzian, we also obtain uniqueness for (3)–(6). For very weak assumptions in this sense, see [18] or [1], since the system (3)–(6) has divergence free right-hand side.
The fact that (3)–(6) provides a parametrization of the solution of (1), around \((x^0,y^0,z^0)\) is stated in the following theorem, proved in [8]:
Theorem 1
Assume that \(f\in \mathcal {C}^2(\varOmega )\) and \(I_1,\,I_2\) are sufficiently small. Then, \((\varphi ,\psi ,\xi ):I_1\times I_2\rightarrow \varOmega \) is a regular transformation on its image.
Remark 1
The systems (3)–(4), respectively (5)–(6) are of Hamiltonian type, in fact. In dimension two, for the implicit equation \(g(x,y)=0\), just one Hamiltonian system may be used, to obtain the parametrization (see [13, 14]):
In arbitrary dimension, the solution is more involved [15].
Remark 2
The advantage of Theorem 1 or other implicit parametrization results, is exactly their explicit character. Moreover, the fact that the solution is obtained via systems of ordinary differential equations makes it possible to use maximal solutions. Theorem 1 has a local character, but in applications, the maximal existence intervals \(I_1,\,I_2\) may be very large. In many cases, one may obtain even global solutions [8]. In comparison with implicit function theorems, removing the restrictive requirement that the solution is in function form, allows to obtain a more complete description of the manifold corresponding to (1).
The above construction provides the basis for the introduction of the generalized solution of (1), in the critical case and we recall it briefly here, for reader’s convenience. We remove hypothesis (2), that is the point \((x^0,y^0,z^0)\) may be critical. We notice that the following weaker property is valid in general: there is \((x^n,y^n,z^n)\in \varOmega \) such that
If (8) is not valid, then \(\nabla f(x^0,y^0,z^0)\!=\!0\) in a neighborhood V of \((\!x^0,y^0,z^0\!)\) and, consequently, \(f(x,y,z)=0\) in V. This is a trivial situation of no interest. For general implicit systems, a similar property may be stated, expressing the fact that the equations of the system have to be functionally independent [15].
Due to (8), one can construct the solution of (3)–(6) with initial condition in \((x^n,y^n,z^n)\). We denote by \(T^n\subset \varOmega \), the set described by \((\varphi ^n,\psi ^n,\xi ^n)\) obtained in (5), in this case. Since f is in \(\mathcal {C}^1(\varOmega )\), \(T^n\) may be assumed compact. By truncation (or imposing \(\varOmega \) to be bounded), we get \(\{T^n\}\) bounded with respect to n. On a subsequence denoted by \(\alpha \), we have:
in the Hausdorff-Pompeiu metric, where \(T_\alpha \subset \varOmega \) is some compact subset, [6].
Definition 1
In the general (critical) case, we call \(T=\cup T_\alpha \) to be the generalized solution of (1), where the union is taken after all the sequences and subsequences as above.
It can be shown that \((x^0,y^0,z^0)\in T\), any point in T satisfies (1) and that Definition 1 provides the usual solution in the classical nonsingular case, [15]. That is, Definition 1 is an extension of the classical notion of solution. If \((x^0,y^0,z^0)\) is an isolated critical point, then again T coincides (locally) with the solution of (1). Otherwise, T may be just the boundary of the solution set of (1), according to [15]. A complete description of the level sets (even of positive measure) of a function, may be obtained in this way.
An algorithm for the approximation of generalized solutions is detailed in [9]. In the next section we indicate some computational examples in this sense.
3 Numerical Examples
All the examples in this section were performed with MatLab. We consider just the critical case.
Example 1
Let \(g(x,y)=x^3-sin{y}\), with the critical point \((x_0,y_0)=\left( 0,\displaystyle \frac{\pi }{2}\right) \).
We are in the critical case: \(g(x_0,y_0)=0\), \(\nabla g(x_0,y_0)=(0,0)\). According to Definition 1, we have to solve (7) with approximating initial conditions \(\left( 0,\displaystyle \frac{\pi }{2}\right) +\left( {\pm }\displaystyle \frac{1}{100},{\mp }\displaystyle \frac{1}{100}\right) \), \(\left( 0,\displaystyle \frac{\pi }{2}\right) +\left( {\pm }\displaystyle \frac{1}{100},{\pm }\displaystyle \frac{1}{100}\right) \). The result is shown in Fig. 1. In Fig. 2 we perform a zoom around the critical point. The four curves corresponding to these initial conditions cannot be distinguished visually, from each other.

\(g(x,y)\!\!=\!\!x^3\!-\!\sin y\),\((x_0,y_0)\!\!=\!\!(0,\displaystyle \frac{\pi }{2})\)

Zoom around \((x_0,y_0)=(0,\displaystyle \frac{\pi }{2})\)
Example 2
Let \(f(x,y,z)=xyz\), with the initial point \((x_0,y_0,z_0)=(0,0,0)\).
We are in the critical case: \(f(x_0,y_0,z_0)=0\) and \(\nabla f(x_0,y_0,z_0)=0\). Consider the approximating initial conditions \(\left( \!\displaystyle \frac{1}{50}, \displaystyle \frac{1}{50},\displaystyle \frac{1}{50}\!\right) \), \(\left( \!-\displaystyle \frac{1}{50}, -\displaystyle \frac{1}{50},\displaystyle \frac{1}{50}\!\right) \), \(\left( \!-\displaystyle \frac{1}{50}, \displaystyle \frac{1}{50},\displaystyle \frac{1}{50}\!\right) \), \(\left( \displaystyle \frac{1}{50}, -\displaystyle \frac{1}{50},\displaystyle \frac{1}{50}\right) \).
In Fig. 3 we show the results for the system (3)–(4), the four curves corresponding to the four initial conditions. In Fig. 4 we superpose the results, corresponding to each of the previous four curves as initial conditions, obtained for the system (5)–(6) together with the following alternative (see [9]) system:
The dark colours correspond to the points where both systems produce solutions.

Ex. 2: the first system

Ex. 2: the second systems
Using the symmetry, the result can be extended for \(z<0\).
Example 3
Let \(f(x,y,z)=(10x^2-y^2-z)(x^2-10y^2-z)\), with the initial point \((x_0,y_0,z_0)=(0,0,0)\).
We are again in the critical case: \(f(x_0,y_0,z_0)=0\) and \(\nabla f(x_0,y_0,z_0)=0\). Consider the approximating initial conditions \(\left( \displaystyle \frac{1}{10}, \displaystyle \frac{1}{10},\displaystyle \frac{9}{100}\right) \), \(\left( -\displaystyle \frac{1}{10}, \displaystyle \frac{1}{10},\displaystyle \frac{9}{100}\right) \), \(\left( \displaystyle \frac{1}{10}, \displaystyle \frac{1}{10},-\displaystyle \frac{9}{100}\right) \), \(\left( -\displaystyle \frac{1}{10}, \displaystyle \frac{1}{10},-\displaystyle \frac{9}{100}\right) \), \(\left( \displaystyle \frac{1}{10}, -\displaystyle \frac{1}{10},-\displaystyle \frac{9}{100}\right) \), \(\left( -\displaystyle \frac{1}{10}, -\displaystyle \frac{1}{10},-\displaystyle \frac{9}{100}\right) \).
In Fig. 5 we represent the solutions of the systems (3)–(4), respectively (5)–(6) for the initial condition \(\left( \displaystyle \frac{1}{10}, \displaystyle \frac{1}{10},\displaystyle \frac{9}{100}\right) \). In Fig. 6 we have put together the solutions of the second system corresponding to all the six approximating initial conditions. In fact, for the initial conditions with negative third coordinate we have used the variant (9) of the system (5)–(6) that avoids \(y=ct\), specific to (5)–(6), and improves the graphical representation. We have intendedly represented, for clarity, just a small number of integral curves.

The initial condition (1 / 10, 1 / 10, 9 / 100)

The solution corresponding to the six initial conditions
4 Applications in Shape Optimization
A typical shape optimization problem has the form:
subject to
Here \(E\subset \varOmega \subset D\subset \mathbb {R}^d\), \(d\in \mathbb {N}\), are bounded Lipschitzian domains, with E and D given and \(\varOmega \) unknown, \(f\in L^2(D)\), \(\varLambda \) is either E or \(\varOmega \) and \(j:\mathbb {R}\times D\rightarrow \mathbb {R}\) satisfies appropriate measurability and other hypotheses [6]. More general state equation, other boundary conditions may be considered as well. Traditional solution methods are boundary variations, speed method, topological asymptotics, the mapping method, the level set method etc., [11, 12]. In the papers [5, 7, 10] functional variations for domains are introduced and studied. The idea is to assume that the admissible domains for (10)–(12) are defined implicitly by
Here g is in some subset of admissible functions \(G_{ad}\), corresponding to the family of admissible domains \(\varOmega =\varOmega _g\). For instance, since we impose that \(E\subset \varOmega =\varOmega _g\), then we have to require
Other constraints may be added according to the envisaged applications.
Due to the representation (13), one may use the functional variations of \(\varOmega \), in the direction of \(h\in \mathcal {C}(\bar{D})\):
where \(\lambda >0\) is a scalar and h satisfies similar conditions as in (13), (14). Notice that the variations (15) of \(\varOmega =\varOmega _g\) may be very complex, combining boundary and topological variations. The function g is a shape (or level) function, but the approach (13)–(15) is not to be confused with the level set method (we have no artificial time in the definition of \(\varOmega _g\) or in g, we need no Hamilton-Jacobi equation, etc.).
An essential ingredient in using general functional variations in the problem (10)–(12) is the following approximation of (11), (12):
where H is the Heaviside function and \(H^\varepsilon \) is some regularization. Such penalization/regularization approaches were used already in [4]. The basic approximation result in this case, according to [5], is the following:
Theorem 2
If \(\varOmega =\varOmega _g\) is of class \(\mathcal {C}\), then \(y_\varepsilon \slash _{\varOmega _g}\rightarrow y_{\varOmega _g}\) weakly in \(H^1(\varOmega _g)\), on a subsequence.
Domains of class \(\mathcal {C}\), roughly speaking, have just continuous boundary. A thorough presentation with applications can be found in [16].
Based on Theorem 2, one can approximate the problem (10)–(12) by the problem (10), (16), (17). If \(\varLambda =E\), this formulation is already a self-contained optimal control problem with unknown g. If \(\varLambda =\varOmega \), then we approximate as well (10) by
Notice that the formulation (16)–(18) excludes the explicit presence of the unknown geometry of \(\varOmega \) and is in fact an optimal control problem with the control g acting in the coefficients of the lower order terms of the state equation (16). Solving for the optimal \(g_\varepsilon \) immediately yields the optimal geometry \(\varOmega _{g_\varepsilon }\) as a level set. In the formulation (16)–(18) one can easily use functional variations as in (15). See [5, 7, 10] for numerical examples as well.
The case of boundary observation (cost) needs a special treatment based on the developments from Sect. 2 and we shall briefly comment on this, just in dimension 2.
We also fix, without loss of generality, some point \(x_0=(x_0^1,x_0^2)\in D\backslash E\subset \mathbb {R}^2\) such that \(g(x_0)=0\) for any admissible \(g\in \mathcal {C}^1(D)\). We assume as well that
to avoid the presence of critical points on \(\partial \varOmega _g\) and the corresponding admissible domains will not “touch” \(\partial D\). We shall denote by \(\varLambda _g\), the connected component of \(\partial \varOmega _g\), containing \(x_0\) (the presence of multiply connected domains \(\varOmega _g\) is allowed in our setting).
The above setting together with the condition (14) defines the set \(G_{ad}\) of admissible controls in (16)–(18). It is possible to work without (20), but this would complicate the exposition. Finally, we impose that \(G_{ad}\subset W^{3,\infty }(D)\). Notice that the obtained class of admissible geometries remains very rich.
Then, by Sect. 2, relation (7), we know that \(\varLambda _g\) can be parametrized by the solution of the Hamiltonian system:
By Proposition 3 in [14], due to the boundedness of D and (19), (20), we may assume that the solution of (21), (22) is periodic and \(\varLambda _g\) is a closed curve, for any \(g\in G_{ad}\). The interval \(I_g\) may be assumed to start in 0 and have the period length (that can be easily determined numerically in applications).
We comment now the following example:
which is a typical case in boundary observation problems and \(y_\varepsilon \) solves (16), (17). By (21), (22) and simple computations, we have:
Notice that the cost functional in (23)–(24) makes sense since \(G_{ad}\subset W^{3,\infty }(D)\) which ensures the regularity of \(\varLambda _g\). Together with (19), (20) and (16), (17), we have that \(y_\varepsilon \in H^{2}(D)\). The formulation (16), (17), (24) again removes any direct reference to the geometric unknowns. Under regularity assumptions, one can consider functional variations (15) and compute directional derivatives (by the chain rule). In the case of thickness optimization problems for shells, a numerical approach based on directional derivatives is used in [17]. A detailed study of shape optimization problems with boundary observation, including the adjoint equation method and computational examples will be performed in a forthcoming paper based on the above approach. The computation of the adjoint equation, in the simpler case of distributed observation in E, is performed in [5].
Remark 3
The advantage of our approach is given by the generality of the admissible variations (combining boundary and topological perturbations without “prescribing” their topological type) and the fact that optimal control theory, in the fixed domain D, may be applied.
References
DiPerna, R.J., Lions, P.L.: Ordinary differential equations, transport theory and Sobolev spaces. Invent. Math. 98, 511–547 (1989)
Dontchev, A.L., Rockafellar, R.T.: Implicit Functions and Solution Mappings. Springer, New York (2009)
Krantz, S.G., Parks, H.R.: The Implicit Functions Theorem. Birkhäuser, Boston (2002)
Mäkinen, R., Neittaanmäki, P., Tiba, D.: On a fixed domain approach for a shape optimization problem. In: Ames W.F., van Houwen, P.J. (eds.) Computational and Applied Mathematics II: Differential Equations, North Holland, Amsterdam, pp. 317–326 (1992)
Neittaanmäki, P., Pennanen, A., Tiba, D.: Fixed domain approaches in shape optimization problems with Dirichlet boundary conditions. Inverse Prob. 25(5), 1–18 (2009)
Neittaanmäki, P., Sprekels, J., Tiba, D.: Optimization of Elliptic Systems. Theory and Applications. Springer Monographs in Mathematics. Springer, New York (2006)
Neittaanmäki, P., Tiba, D.: Fixed domain approaches in shape optimization problems. Inverse Prob. 28(9), 1–35 (2012)
Nicolai, M.R., Tiba, D.: Implicit functions and parametrizations in dimension three: generalized solution. DCDA-A 35(6), 2701–2710 (2015). doi:10.3934/dcds.2015.35.2701.
Nicolai, M.R.: An algorithm for the computation of the generalized solution for implicit systems. Ann. Acad. Rom. Sci. Ser. Math. Appl. 7(2), 310–322 (2015)
Philip, P., Tiba, D.: A penalization and regularization technique in shape optimization. SIAM J. Control Optim. 51(6), 4295–4317 (2013)
Sethian, J.A.: Level Set Methods. Cambridge Univ. Press, Cambridge (1996)
Sokolowsky, J., Zolesio, J.-P.: Introduction to Shape Optimization. Shape Sensitivity Analysis. Springer, Berlin (1992)
Thorpe, J.A.: Elementary Topics in Differential Geometry. Springer, New York (1979)
Tiba, D.: The implicit functions theorem and implicit parametrizations. Ann. Acad. Rom. Sci. Ser. Math. Appl. 5(1–2), 193–208 (2013). http://www.mathematics-and-its-applications.com/preview/june2013/data/art%2010.pdf
Tiba, D.: A Hamiltonian approach to implicit systems, generalized solutions and applications in optimization (2016). http://arxiv.org/abs/1408.6726v4.pdf
Tiba, D.: Domains of class C: properties and applications. Ann. Univ. Buchar. Math. Ser. 4(LXII)(1), 89–102 (2013)
Ziemann, P.: Optimal thickness of a cylindrical shell. Ann. Acad. Rom. Sci. Ser. Math. Appl. 6(2), 214–234 (2014). http://www.mathematics-and-its-applications.com/preview/november_2014/data/articol6.pdf
Zuazua, E.: Log-Lipschitz regularity and uniqueness of the flow for a field in \([W_{loc}^{n/p+1} (R^n)]^n\). CRAS Paris, Ser I 335, 17–22 (2002)
Acknowledgments
The work of both authors was supported by Grant 145 / 2011 of CNCS Romania.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 IFIP International Federation for Information Processing
About this paper
Cite this paper
Nicolai, M.R., Tiba, D. (2016). Implicit Parametrizations and Applications. In: Bociu, L., Désidéri, JA., Habbal, A. (eds) System Modeling and Optimization. CSMO 2015. IFIP Advances in Information and Communication Technology, vol 494. Springer, Cham. https://doi.org/10.1007/978-3-319-55795-3_37
Download citation
DOI: https://doi.org/10.1007/978-3-319-55795-3_37
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-55794-6
Online ISBN: 978-3-319-55795-3
eBook Packages: Computer ScienceComputer Science (R0)