
Abstract
In this paper, the abort landing problem is considered with reference to a point-mass aircraft model describing flight in a vertical plane. It is assumed that the pilot linearly increases the power setting to maximum upon sensing the presence of a windshear. This option is accounted for in the aircraft model and is not considered as a control. The only control is the angle of attack, which is assumed to lie between minimum and maximum values. The aim of this paper is to construct a feedback strategy that ensures a safe abort landing. An algorithm for solving nonlinear differential games is used for the design of such a strategy. The feedback strategy obtained is discontinuous in time and space so that realizations of control may have a bang-bang structure. To be realistic, outputs of the feedback strategy are being smoothed in time, and this signal is used as control.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
- Aircraft model
- Penetration landing
- Abort landing
- Differential game
- Hamilton-Jacobi equation
- Grid method
- Feedback strategy
- Optimal trajectories
1 Introduction
Many aircraft accidents are caused by severe windshears such as e.g. downbursts. A downburst appears when a descending column of air hits the ground and then spreads horizontally. This phenomenon is especially dangerous for aircrafts during landing or take-off, because a headwind can be followed by a downdraft and then by a tailwind at relatively low altitudes.
There are a large number of works devoted to the problem of aircraft control in the presence of severe windshears. In particular, papers [1,2,3,4,5,6,7,8] address the problem of aircraft control during take-off in the presence of windshears. In works [1, 2], the wind velocity field is assumed to be known. It is shown that open loop controls obtained as solutions of appropriate optimization problems provide satisfactory results for rather severe wind disturbances. Nevertheless, it is clear that the spatial distribution of wind velocity cannot be measured with an appropriate accuracy, and therefore feedback principles of control design are more realistic. Different types of feedback controls are proposed in papers [3,4,5,6]. In [3], the design of a feedback robust control is based on the construction of an appropriate Lyapunov function. Robust control theory is used in [4] to develop feedback controls stabilizing the relative path inclination and, in [5, 6], for the design of feedback controls stabilizing the climb rate. In papers [7, 8], feedback controls, which are effective against downbursts, are designed using differential game approach (see e.g. [9]). The value function, which is a viscosity solution (see. e.g. [10, 11]) of an appropriate Hamilton-Jacobi equation, are computed using dynamic programming techniques described in [12, 13]. Both the case of known wind velocity field and the case of unknown wind disturbance are considered.
An approach based on differential game theory is used in paper [14] in concern with the problem of landing. A full nonlinear system of model equations is linearized and reduced to a two-dimensional differential game using a transformation of variables. The resulting differential game is numerically solved, and optimal feedback controls are constructed.
Paper [15] considers the penetration landing problem with reference to flight in a vertical plane. The model is governed either by one control (the angle of attack, if the power setting is predetermined) or two controls (the angle of attack and the power setting). The wind field is simulated by a downburst, and an near-optimal open-loop control is computed.
Works [16,17,18,19,20] refer to the abort landing problem. In paper [16], the optimization problem, a Chebysbev problem of optimal control, is converted into a Bolza problem through suitable transformations. The Bolza problem is then solved employing the dual sequential gradient-restoration algorithm for optimal control problems. Numerical results are obtained for several combinations of windshear intensities, initial altitudes, and power setting rates. Papers [17,18,19] are also concerned with a Chebysbev problem of optimal control. They utilize a multiple shooting method to compute a near-optimal control maximizing a performance index and providing necessary state constraints. Paper [20] deals with the application of differential games theory to take-off and abort landing problems. The same as in [1, 16], nonlinear aircraft model describing flight in a vertical plane is considered, the dynamics equations are linearized about some reference trajectory, and the resulting differential game is reduced to a two-dimensional one under the assumption that the performance index is being computed at a fixed termination time and depends on two state variables. Feedback strategies are constructed in the form of switch lines that divide the reduced two-dimensional state space into components where certain constant values of control are prescribed. A careful tuning of this method, which includes the use of a “sliding” termination time, allows the author to obtain trajectories comparable with those from work [16].
The current paper concerns with the abort landing problem considered in [20] in the framework of differential game theory. The difference consists in the application of numerical methods described in [12, 13] to the original nonlinear model reported in [16]. Moreover, a performance index of Chebysbev type is used in the current paper. The optimal trajectories are comparable with these obtained in [16, 20]. It should be noted that the method described in the current paper does not require fine tuning of parameters.
2 Model Equations
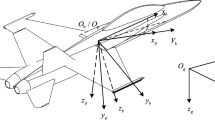
We use a simplified aircraft model describing flight in a vertical plane, see papers [1, 2, 16]. Hence, the following system of four ordinary differential equations governing the horizontal distance x, the altitude h, the aircraft relative velocity V, and the relative path inclination \(\gamma \) is considered:
Here, \(\alpha \) is the angle of attack; \(W_x\) and \(W_h\) are the longitudinal and vertical components of the wind velocity, respectively; g is the acceleration of gravity; m the aircraft mass; \(\delta \) the thrust inclination; T, D, and L are the thrust, drag, and lift forces, respectively. The following definitions hold:
where \(\beta (\cdot )\) is a function that changes the power setting at time \(t_0\), upon sensing the presence of a windshear; \(t_f\) is the end time; and \(\beta _0\), \(\dot{\beta }_0\), \(\alpha _*\), \(\alpha _{**}\) are given constants. The attack angle \(\alpha \) is considered as the control parameter constrained by the inequalities \(0~\le ~\alpha ~\le ~\alpha _*\).
If the components \(W_x(x,h)\) and \(W_h(x,h)\) of the velocity field are known, the derivatives \(\dot{W}_x\) and \(\dot{W}_h\) in model (1) are computed using the first two equations.
Two wind velocity field models are used in our simulations.
Wind Model 1. The first, downburst, model is borrowed from [3]:
where a, b, c, and k are parameters defining the location and the strength of the downburst. It was set \(k=50\), which corresponds to strong-to-severe windshears.
Wind Model 2. The second, double vortex model, is taken from [4]. It has two cores of radius R located symmetric about the vertical line \(x=1500\). The vortex motion of air about the centres of the cores occurs as follows. Inside of each core, the tangential speed, \(W_{\theta }\), of wind increases linearly from zero (at the center) to a maximum value \(W_0\) (at the core boundary). Outside of the core, \(W_{\theta }\) decreases in inverse proportion to the distance from the core. In the polar coordinate system with the origin at the core center, the tangential speed of wind is given by the formula
It was chosen \(W_0=100\), which corresponds to strong-to-severe windshears.
The conflict control problem is stated in the same way as in [20]:
Here, \(v_1\) and \(v_2\) are artificial disturbances that may have instantaneous jumps. The wind components \(W_x\) and \(W_h\) smoothly track \(v_1\) and \(v_2\), respectively, with a time lag depending on the parameter \(\kappa \) (set \(\kappa =0.2\)). The following constraints are imposed (cf. [20]):
3 Problem Statement
Two problem statements will be considered. In both cases, the wind velocity field is supposed to be unknown. Feedback controls will be constructed from the corresponding conflict control problems.
P1. The objective of the control \(\alpha \) in system (2) is to maximize a payoff functional defined below, i.e.
It is easily seen that the expression in the parentheses of (4) is the climb rate \(\dot{h}(t)\). Besides, the maximum in (4) is taken over all feedback strategies \(\alpha [\cdot ]\).
In this variant, the full four-dimensional differential game (2)–(4) will be numerically solved.
P2. In the second variant, the idea to derive an equation for the climb rate (see [6]) is used. Computing \(\ddot{h}\) from system (2) yields the formulae
Thus, the following system arises:
where the function \({\mathcal Z}\) is defined by the above formulae. Moreover, the payoff functional is chosen the same as in P1:
It should be noted that the vertical wind velocity, \(W_h\), and the relative velocity, V, are considered as disturbances. The same constraints as in [7, 8] are imposed:
where \(V_\text {ref}=276\,\text{ ft/s }\) is a reference value. It is worth to mention that only negative deviations of V and \(W_h\) from their reference values are taken in (5), because negative deviations are more dangerous.
4 Numerical Method
Let us shortly outline the solution method for problems P1 and P2. The description will be given in terms of general nonlinear differential games, which is similar to that presented in [7, 8].
4.1 Differential Game and Value Function
Consider a differential game defined as follows:
where x is the state vector, \(\alpha \) and \(\beta \) are control parameters of the first and second player, respectively. The sets A and B are given compacts. The game starts at \(t_0 \in [0,t_f]\) and finishes at \(t_f\). The objective of the first player (control \(\alpha \)) is to minimize the functional
It is assumed that the first player uses pure feedback strategies, i.e. functions of the form:
The second player (wind) uses feedback counter strategies:
Thus, it is assumed that second player can measure the current value of the attack angle (“future” values are not available), which meets the concept of guaranteeing control.
For any initial position \((t_0,x_0)\in [0,t_f]\times \mathbb {R}^n\) and any strategies \(\mathcal{A}\) and \(\mathcal{B}^c\), two functional sets \(\mathcal{X}_1(t_0,x_0,\mathcal{A})\) and \(\mathcal{X}_2(t_0,x_0,\mathcal{B}^c)\) are defined (see [9]). It is proven in [9] that the differential game (6), (7) has a value function defined by:
It is known (see [10,11,12]) that the value function is a viscosity solution of the Hamilton-Jacobi equation:
4.2 Grid Method for Computing the Value Function
To compute viscosity solutions of (8), the following finite difference scheme can be used (see [7, 8, 12, 13]).
Let \(h_1,...,h_n\) and \(\tau \) be space and time discretization steps, and F an operator defined on continuous functions by the relation
Set \(\varLambda = t_f/\tau \), \(t_\ell =\ell \tau ,\) \(\ell =0,..., \varLambda \), and introduce the following notation:
The following backward in time finite-difference scheme yields an approximate solution:
Here, \({\mathcal L}_{h}\) is an interpolation operator that maps grid functions to continuous functions.
4.3 Control Design
During the performance of the algorithm (10), the optimal grid values of the attack angle,
are stored on a hard disk for all \(\ell \). The control at a time instant \(t_s\) and the current state \(x(t_s)\) is computed as \({\mathcal L}_h[\alpha ^s]\big (x(t_s)\big )\), where \(\alpha ^s\) denotes the grid function \(\alpha _{i_1i_2...i_n}^s\).
5 Simulation Results
This section describes numerical results of simulations where optimal controls obtained in problems P1 and P2 work against wind models 1 and 2. Numerical values of parameters appearing in our considerations are the same as in [3, 16, 20]. The parameters correspond to Boeing-727.
In all simulations, \(t\in [0,40]\,\text {s}\), and the initial values of the state variables are chosen the same as in [16, 20]: \(x(0)=0\), \(h(0)=600\) ft, \(V(0)=239.7\) feet/s, and \(\gamma (0)=-2.249\,\text {deg}\).
In all figures, the horizontal axes measure either the traveled distance (from 0 to 10700 ft) or the time of flight (from 0 to 40 s).
The calculations are performed on a Linux SMP-computer with 8xQuad-Core AMD Opteron processors (Model 8384, 2.7 GHz) and shared 64 GB memory. The programming language C with OpenMP (Open Multiprocessing) support is used. The efficiency of the parallelization is up to 80%.
Simulation 1. An optimal feedback strategy \(\alpha [\cdot ]\) computed from problem P1 works up against wind models 1 and 2 in the simulation of model (1). When solving problem P1, a \(100\times 10 \times 40 \times 40\) grid in the state space \((V,\gamma ,W_x,W_h)\) is used. Another variant concerns the application of sparse grid techniques (see e.g. [21]). Namely, the grid functions \({\mathcal V}^\ell \) are stored on a sparse grid, and the operator \({\mathcal L}_{h}\) is implemented as interpolation on this grid.
Simulation 2. An optimal feedback strategy \(\alpha [\cdot ]\) computed from problem P2 works up against wind models 1 and 2 in the simulation of model (1). When solving problem P2, a \(400 \times 200\) grid in the state space \((h, \dot{h})\) is used.
Figure 2A shows that the maximal attack angle guidance fails against wind model 1. The reason is that the aircraft relative velocity drops just in the beginning of the trajectory because of the large attack angle.
Figure 1A shows Simulation 1 in the case of wind model 1. It is seen that the angle of attack is close to zero in the beginning of the trajectory. The aircraft drifts down for a while and gains the relative velocity, which enables a safe abort landing. Figure 1B shows the same but for wind model 2.


Figure 2B shows Simulation 1 for wind model 2 in the case where the differential game (2) is solved using sparse grid techniques.
Figure 3 shows the change of results if the output, \(\bar{\alpha }\), of an optimal feedback strategy found from the differential game (2) is being smoothed using the filter \(\dot{\alpha } =-(\alpha - \bar{\alpha })\) when computing trajectories in model (1). Wind model 1 is used in this simulation. It should be noted that a comparable divergence of trajectories occurs when using wind model 2.
Figure 4 shows the difference of results in Simulations 1 and 2. Wind model 1 is used in both simulations. The solid line corresponds to Simulations 1, and the dashed one stands for Simulation 2.

The change of results if the output of an optimal strategy found from the differential game (2) is being smoothed with a filter. Wind model 1 is used. The dashed line shows the case of smoothing.

The difference of results in Simulations 1 and 2. Wind model 1 is used in both simulations. The solid line corresponds to Simulation 1, and the dashed line stands for Simulation 2.
Note that our simulation results are in a good agreement with those of paper [16] where an open loop control is designed for the aircraft dynamics given by (1). Besides, our results are in conformity with those of paper [20] where a control based on the computation of switch lines in an appropriate two-dimensional linear differential game is constructed.
6 Conclusion
The current investigation shows that methods based on the theory of differential games can be successfully applied to nonlinear conflict control problems concerned with aircraft maneuvers under windshear conditions. The paper demonstrates that the approach based on the solution of nonlinear differential games yields feedback controls that can work against strong-to-severe wind disturbances in abort landing. It should be noted that this approach does not require special adaptation of the controller to the problem, and, on the other hand, it is competitive with other approaches based, e.g. on robust control theory.
References
Miele, A., Wang, T., Melvin, W.W.: Optimal take-off trajectories in the presence of windshear. J. Optim. Theory Appl. 49, 1–45 (1986)
Miele, A., Wang, T., Melvin, W.W.: Guidance strategies for near-optimum take-off performance in windshear. J. Optim. Theory Appl. 50(1), 1–47 (1986)
Chen, Y.H., Pandey, S.: Robust control strategy for take-off performance in a windshear. Optim. Control Appl. Methods 10(1), 65–79 (1989)
Leitmann, G., Pandey, S.: Aircraft control under conditions of windshear. In: Leondes, C.T. (ed.) Control and Dynamic Systems, Part 1, vol. 34, pp. 1–79. Academic Press, New York (1990)
Leitmann, G., Pandey, S.: Aircraft control for flight in an uncertain environment: takeoff in windshear. J. Optim. Theory Appl. 70(1), 25–55 (1991)
Leitmann, G., Pandey, S., Ryan, E.: Adaptive control of aircraft in windshear. Int. J. Robust Nonlinear 3, 133–153 (1993)
Botkin, N.D., Turova, V.L.: Application of dynamic programming approach to aircraft take-off in a windshear. In: Simos, T.E., Psihoyios, G., Tsitouras, C., Zacharias, A. (eds.) AIP Conference Proceedings, ICNAAM-2012, vol. 1479, pp. 1226–1229. AIP, Melville (2012)
Botkin, N.D., Turova, V.L.: Dynamic programming approach to aircraft control in a windshear. In: Křivan, V., Zaccour, G. (eds.) Advances in Dynamic Games: Theory, Applications, and Numerical Methods. Annals of the International Society of Dynamic Games, vol. 13, pp. 53–69 (2013)
Krasovskii, N.N., Subbotin, A.I.: Game-Theoretical Control Problems. Springer, New York (1988)
Crandall, M.G., Lions, P.L.: Viscosity solutions of Hamilton-Jacobi equations. Trans. Am. Math. Soc. 277, 1–47 (1983)
Subbotin, A.I.: Generalized Solutions of First Order PDEs: The Dynamical Optimization Perspective. Birkhäuser, Boston (1995)
Botkin, N.D., Hoffmann, K.-H., Mayer, N., Turova, V.L.: Approximation schemes for solving disturbed control problems with non-terminal time and state constraints. Analysis 31, 355–379 (2011)
Botkin, N.D., Hoffmann, K.-H., Turova, V.L.: Stable numerical schemes for solving Hamilton-Jacobi-Bellman-Isaacs equations. SIAM J. Sci. Comput. 33(2), 992–1007 (2011)
Patsko, V.S., Botkin, N.D., Kein, V.M., Turova, V.L., Zarkh, M.A.: Control of an aircraft landing in windshear. J. Optim. Theory Appl. 83(2), 237–267 (1994)
Miele, A., Wang, T., Wang, H., Melvin, W.W.: Optimal penetration landing trajectories in the presence of windshear. J. Optim. Theory Appl. 57(1), 1–40 (1988)
Miele, A., Wang, T., Tzeng, C.Y., Melvin, W.W.: Optimal abort landing trajectories in the presence of windshear. J. Optim. Theory Appl. 55(2), 165–202 (1987)
Bulirsch, R., Montrone, F., Pesch, H.J.: Abort landing in the presence of a windshear as a minimax optimal control problem, part 1: necessary conditions. J. Optim. Theory Appl. 70(1), 1–23 (1991)
Bulirsch, R., Montrone, F., Pesch, H.J.: Abort landing in the presence of a windshear as a minimax optimal control problem, part 2: multiple shooting and homotopy. J. Optim. Theory Appl. 70(2), 223–254 (1991)
Berkmann, P., Pesch, H.J.: Abort landing in windshear: optimal control problem with third-order state constraint and varied switching structure. J. Optim. Theory Appl. 85(1), 21–57 (1995)
Turova, V.L.: Application of numerical methods of the theory of differential games to the problems of take-off and abort landing. In: Osipov, Y. (ed.) Proceedings of the Institute of Mathematics and Mechanics, Ross. Akad. Nauk Ural. Otdel., Inst. Mat. Mekh., Ekaterinburg, vol. 2., pp. 188–201 (1992). (in Russian)
Pflüger, D.: Spatially adaptive sparse grids for higher-dimensional problems. Dissertation, Verlag Dr. Hut, München (2010)
Acknowledgements
This work was supported in part by the DFG grant TU427/2-1.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 IFIP International Federation for Information Processing
About this paper
Cite this paper
Botkin, N., Turova, V. (2016). Optimal Abort Landing in the Presence of Severe Windshears. In: Bociu, L., Désidéri, JA., Habbal, A. (eds) System Modeling and Optimization. CSMO 2015. IFIP Advances in Information and Communication Technology, vol 494. Springer, Cham. https://doi.org/10.1007/978-3-319-55795-3_12
Download citation
DOI: https://doi.org/10.1007/978-3-319-55795-3_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-55794-6
Online ISBN: 978-3-319-55795-3
eBook Packages: Computer ScienceComputer Science (R0)