
Abstract
The theory of an elastic rod whose centerline is inextensible and whose cross sections remain plane and normal to the centerline is discussed. This theory, which is known as Kirchhoff rod theory, is presented in the modern context of a Cosserat rod theory. The governing equations for this widely used theory result in a set of equations to determine a rotation tensor P and a position vector r. This theory has a celebrated history in part because of Kirchhoff’s discovery that the equations governing static deformations of the rod are analogous to those for the rotational motion of a rigid body. A range of applications of the theory is also presented in this chapter. These examples include a terminally loaded rod which is bent and twisted and an initially curved rod which is straightened.
“A new idea, supple in application to a variety of mechanical theories and formalisms, was proposed by DUHEM [1893, 1, Ch. II]: A body is to be regarded as a collection not only of points but also of directions associated with the points: These vectors, which we shall call the directors of the body, are susceptible of rotations and stretches independent of the deformation of material elements.”
J. L. Ericksen and C. A. Truesdell [100, Page. 297] commenting on Pierre Duhem’s (1861–1916) contribution in [94] to the historical development of theories for rods and shells.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Notes
- 1.
- 2.
Recall that an orthogonal tensor Q has the property that QQ T = I and so \(\det \left (\mathbf{Q}\right ) = \pm 1\). A proper-orthogonal tensor Q has a determinant of 1. From Euler’s theorem in rigid body dynamics, proper-orthogonal tensors and rotation tensors are synonymous.
- 3.
- 4.
- 5.
The 3-2-1 set of Euler angles are sometimes known as the Tait-Bryan angles and are prominent in aircraft and vehicle dynamics. The first instance of their development and use dates to the seminal work of Fick and Helmholtz [166, 167] on the kinematics of the eye (see [156, 253] and references therein) in the mid-1800s and Tait’s work [336] on rigid body dynamics in 1868.
- 6.
The operator skew(i) transforms i into a skew-symmetric tensor such that i ×b = skew(i)b for any vector b (cf. Eqn. (1.19)).
- 7.
The axial vectors in Eqns. (5.24) and (5.25) can be computed by direct differentiation of the tensor P or using the relative angular velocity vector proposed by Casey and Lam [51]. Applications of Casey and Lam’s relative angular velocity vector can be found in the textbook [265, Sections 6.7 and 6.8].
- 8.
- 9.
You may wish to look at our earlier discussion of the helix in Section 3.4
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
For ease of exposition and without loss of generality, we assume that there is at most one such point.
- 17.
- 18.
As we saw earlier for a string, the jump condition (5.83) simplifies to \(\mathbf{M}_{O_{\gamma }} -\mathbf{r}\left (\gamma,t\right ) \times \mathbf{F}_{\gamma } = \mathbf{0}\) (i.e., M γ = 0 when the directors are ignored (cf. Eqn. (1.87))). As mentioned in an earlier chapter, the physical interpretation of this result is that a string can neither transmit nor resist a moment, so application of a nonzero M γ at ξ = γ is not feasible.
- 19.
A key calculation used to arrive at the simplification is discussed in Exercise 5.7.
- 20.
The jump conditions \(\left [\!\left [\mathbf{n}\right ]\!\right ]_{\gamma } + \mathbf{F}_{\gamma } = \mathbf{0}\) and \(\left [\!\left [\mathbf{m}\right ]\!\right ]_{\gamma } + \mathbf{M}_{\gamma } = \mathbf{0}\) where γ = 0 and γ = ℓ are used to compute the boundary conditions on n and m.
- 21.
- 22.
See the discussion pertaining to Exercise 4.2 on Page 183.
- 23.
- 24.
See Exercise 5.8 for further details on the Lagrangian and the specific form of Lagrange’s equations of interest here.
- 25.
The application here of the dual Euler basis vectors to explain the terminal loading on the rod is novel and, to the best of our knowledge, has not appeared previously in the vast literature on terminally loaded rods.
- 26.
This classic result can be used to show that the solutions to the second-order differential equation (5.144) conserve \(\frac{EI} {2} \left (\frac{\partial \alpha ^{2}} {\partial \xi } \right )^{2} + U\) and can be expressed in terms of Weierstrassian elliptic functions. For further details on this integration and the Routhian reduction procedure that can be used to establish Eqn. (5.144), the exposition in Whittaker [362, Section 71] is highly recommended.
- 27.
For details on this calculation, see Exercise 5.9.
- 28.
- 29.
This observation on the change in handedness as Δ varies does not appear to have been previously recorded in the literature.
- 30.
- 31.
It is useful to note that this choice implies that \(\frac{\partial \alpha ^{2}} {\partial x}\left (x = x_{1} = 0\right ) = \pm 2\left (1 -\sqrt{\varDelta }\right )\). To see this result, it suffices to set e = 1 in Eqn. (5.160) and then solve for \(\frac{\partial \alpha ^{2}} {\partial x}\) when \(\cos \left (\alpha _{0}^{2}\right ) = 2\sqrt{\varDelta }- 1\).
- 32.
Our discussion here, while also based on the behavior of s ℓ as F 0 varies, is different from Coyne’s. In particular, his discussion has statements on stability and instability that we have not been able to follow.
- 33.
The terminology is based on the use of the word perversion (or “Verkehrung” (= reversal)) by the famed topologist Johann B. Listing (1808–1882) for a transformation that changes the handedness of a helix (see [208, Page 22]).
- 34.
- 35.
- 36.
The interested reader is referred to the paper by Liu et al. [209] where an example of such an intrinsically curved body is used to help analyze perversions.
- 37.
- 38.
- 39.
This result was discussed in an earlier chapter of this text and the reader is referred to Eqn. (1.34) for details.
- 40.
In the sequel, our numerical results pertain to \(\phi _{0} = \frac{\pi } {2}\). We found that the solutions of Eqn. (5.180) for \(\phi _{0} = -\frac{\pi }{2}\) are qualitatively similar and so, in the interests of brevity, they are not mentioned.
- 41.
Whence our reference to the critical value \(f_{0} = \frac{1} {\mathcal{D}}\) in the caption for Figure 5.22.
- 42.
- 43.
Note that we can express each of the vector equations \(\mathbf{d}_{i}^{'} = \left (\mathbf{P}\left (\boldsymbol{\nu }+\boldsymbol{\nu }_{0}\right )\right ) \times \mathbf{d}_{i}\) in terms of their E k components to form three first-order differential equations. However, in the interests of brevity, we refrain from writing out the components.
- 44.
We are grateful to Tyler McMillen and Alain Goriely for generously supplying the code needed to construct the solutions shown in Figures 5.23 and 5.24.
Fig. 5.24 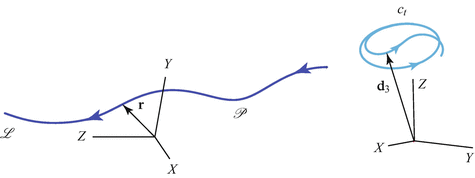
The centerline r(ξ) and tangent indicatrix c t for the approximation \(\mathcal{P}\) to a perversion that is shown in Figure 5.23. The arrows indicate the direction of increasing ξ.
- 45.
- 46.
A translation of Euler’s comments on stability can be found in [254, Pages 102–103]. Timoshenko and Gere [345, Chapter 2] contains a comprehensive discussion of the buckling of a strut and the dependency of the critical loads on the boundary conditions. The text by Ziegler [375] is also highly recommended.
- 47.
- 48.
Our comments here are intimately related to the discussion on Q SF and \(\boldsymbol{\omega }_{\text{SF}}\) in Section 5.10.
- 49.
Further details on the procedure to establish equations of this form are discussed in Exercise 5.14.
- 50.
- 51.
- 52.
The terminology we use here is from the literature on DNA testing (cf. Ðuričković et al. [89]).
- 53.
That is, we are considering a set of three infinitesimal rotations superposed on a finite rotation.
- 54.
- 55.
- 56.

References
Antman, S.S.: Kirchhoff’s problem for nonlinearly elastic rods. Quarterly of Applied Mathematics 32, 221–240 (1974)
Antman, S.S.: Nonlinear Problems of Elasticity, Applied Mathematical Sciences, vol. 107, second edn. Springer-Verlag, New York (2005)
Arnol’d, V.I.: Mathematical Methods of Classical Mechanics, Graduate Texts in Mathematics, vol. 60, second edn. Springer-Verlag, New York (1989). Translated from the Russian by K. Vogtmann and A. Weinstein
Bergou, M., Wardetzky, M., Robinson, S., Audoly, B., Grinspun, E.: Discrete elastic rods. ACM Transactions on Graphics (SIGGRAPH) 27 (3), 63:1–63:12 (2008)
Casey, J.: A treatment of rigid body dynamics. ASME Journal of Applied Mechanics 50, 905–907 and 51 227 (1983). URL http://dx.doi.org/10.1115/1.3167171
Casey, J., Lam, V.C.: On the relative angular velocity tensor. ASME Journal of Mechanisms, Transmissions, and Automation in Design 108, 399–400 (1986). URL http://dx.doi.org/10.1115/1.3258746
Chouaieb, N., Goriely, A., Maddocks, J.H.: Helices. Proceedings of the National Academy of Sciences 103 (25), 9398–9403 (2006). URL http://dx.doi.org/10.1073/pnas.0508370103
Clauvelin, N., Audoly, B., Neukirch, S.: Matched asymptotic expansions for twisted elastic knots: A self-contact problem with non-trivial contact topology. Journal of the Mechanics and Physics of Solids 57 (9), 1623–1656 (2009). URL http://dx.doi.org/10.1016/j.jmps.2009.05.004
Coleman, B.D., Swigon, D.: Theory of supercoiled elastic rings with self-contact and its application to DNA plasmids. Journal of Elasticity 60 (3), 173–221 (2000). URL http://dx.doi.org/10.1023/A:1010911113919
Coleman, B.D., Swigon, D.: Theory of self-contact in Kirchhoff rods with applications to supercoiling of knotted and unknotted DNA plasmids. Philosophical Transactions of the Royal Society of London A: Mathematical, Physical and Engineering Sciences 362 (1820), 1281–1299 (2004). URL http://dx.doi.org/10.1098/rsta.2004.1393
Cosserat, E., Cosserat, F.: Sur la statique de la ligne déformable. Compte Rendus de l’Académie des Sciences, Paris 145, 1409–1412 (1907)
Cosserat, E., Cosserat, F.: Théorie des Corps Déformables. A. Hermann et Fils, Paris (1909)
Coyne, J.: Analysis of the formation and elimination of loops in twisted cable. IEEE Journal of Oceanic Engineering 15 (2), 72–83 (1990). URL http://dx.doi.org/10.1109/48.50692
Cusumano, J.P., Moon, F.C.: Chaotic non-planar vibrations of the thin elastica: Part I: Experimental observation of planar instability. Journal of Sound and Vibration 179 (2), 185–208 (1995). URL http://dx.doi.org/10.1006/jsvi.1995.0013
Cusumano, J.P., Moon, F.C.: Chaotic non-planar vibrations of the thin elastica: Part II: Derivation and analysis of a low-dimensional model. Journal of Sound and Vibration 179 (2), 209–226 (1995). URL http://dx.doi.org/10.1006/jsvi.1995.0014
Darwin, C.R.: On the movements and habits of climbing plants. Journal of the Linnean Society of London, Botany 9 (33–34), 1–118 (1865). URL 10.1111/j.1095-8339.1865.tb00011.x. Second edition printed in London in 1875 by J. Murray.
Davies, M.A., Moon, F.C.: 3-D spatial chaos in the elastica and the spinning top: Kirchhoff analogy. Chaos 3 (1), 93–99 (1993). URL http://dx.doi.org/10.1063/1.165969
Dichmann, D.J., Li, Y., Maddocks, J.H.: Hamiltonian formulations and symmetries in rod mechanics. In: J.P. Mesirov, K. Schulten, D. Sumners (eds.) Mathematical approaches to biomolecular structure and dynamics (Minneapolis, MN, 1994), The IMA Volumes in Mathematics and its Applications, vol. 82, pp. 71–113. Springer-Verlag, New York (1996). URL http://dx.doi.org/10.1007/978-1-4612-4066-2_6
Ðuričković, B., Goriely, A., Maddocks, J.H.: Twist and stretch of helices explained via the Kirchhoff-Love rod model of elastic filaments. Physical Review Letters 111, 108,103 (2013). URL http://link.aps.org/doi/10.1103/PhysRevLett.111.108103
Domokos, G., Healey, T.J.: Multiple helical perversions of finite, intrinsically curved rods. International Journal of Bifurcation and Chaos 15 (3), 871–890 (2005). URL http://dx.doi.org/10.1142/S0218127405012430
Duhem, P.: Le potentiel thermodynamique et la pression hydrostatique. Annales Scientifiques de l’École Normale Supérieure 10, 183–230 (1893). URL http://eudml.org/doc/81051
Ericksen, J.L., Truesdell, C.: Exact theory of stress and strain in rods and shells. Archive for Rational Mechanics and Analysis 1 (1), 295–323 (1958). URL http://dx.doi.org/10.1007/BF00298012
Euler, L.: Methodus Inveniendi Lineas Curvas Maximi Minimive Proprietate Gaudentes, sive Solutio Problematis Isoperimetrici Lattissimo Sensu Accepti: Additamentum 1 De Curvis Elasticis. Leonhardi Euleri Opera Omnia, Series prima (Opera mathematica), Vol. XXIV, Auctoritate et impensis Societatis Scientiarum Naturalium Helveticae. Orell Füssli, Zürich (1952). An English translation of this work can be found in [254].
Ginsberg, J.H.: Advanced Engineering Dynamics, second edn. Cambridge University Press, Cambridge (1995)
Gore, J., Bryant, Z., Nöllmann, M., Le, M.U., Cozzarelli, N.R., Bustamante, C.: DNA overwinds when stretched. Nature 442, 836–839 (2006). URL http://dx.doi.org/10.1038/nature04974
Goriely, A.: The Mechanics and Mathematics of Biological Growth. Springer-Verlag, New York (2017)
Goriely, A., Neukirch, S.: The mechanics of attachment in twining plants. Physical Review Letters 97, 184,302 (2006). URL http://dx.doi.org/10.1103/PhysRevLett.97.184302
Goriely, A., Tabor, M.: Spontaneous helix hand reversal and tendril perversion in climbing plants. Physical Review Letters 80, 1564–1567 (1998). URL http://dx.doi.org/10.1103/PhysRevLett.80.1564
Goyal, S., Perkins, N.C.: Looping mechanics of rods and DNA with non-homogeneous and discontinuous stiffness. International Journal of Non-Linear Mechanics 43 (10), 1121–1129 (2008). URL http://dx.doi.org/10.1016/j.ijnonlinmec.2008.06.013
Goyal, S., Perkins, N.C., Lee, C.L.: Non-linear dynamic intertwining of rods with self-contact. International Journal of Non-Linear Mechanics 43 (1), 65–73 (2008). URL http://dx.doi.org/10.1016/j.ijnonlinmec.2007.10.004
Green, A.E., Laws, N.: Remarks on the theory of rods. Journal of Elasticity 3 (3), 179–184 (1973). URL http://dx.doi.org/10.1007/BF00052892
Green, A.E., Laws, N., Naghdi, P.M.: A linear theory of straight elastic rods. Archive for Rational Mechanics and Analysis 25 (4), 285–298 (1967). URL http://dx.doi.org/10.1007/BF00250931
Green, A.E., Naghdi, P.M.: A derivation of jump condition for entropy in thermomechanics. Journal of Elasticity 8 (2), 119–182 (1978). URL http://dx.doi.org/10.1007/BF00052481
Green, A.E., Naghdi, P.M., Wenner, M.L.: On the theory of rods. I Derivations from three-dimensional equations. Proceedings of the Royal Society. London. Series A. Mathematical, Physical and Engineering Sciences 337 (1611), 451–483 (1974). URL http://dx.doi.org/10.1098/rspa.1974.0061
Green, A.E., Naghdi, P.M., Wenner, M.L.: On the theory of rods. II Developments by direct approach. Proceedings of the Royal Society. London. Series A. Mathematical, Physical and Engineering Sciences 337 (1611), 485–507 (1974). URL http://dx.doi.org/10.1098/rspa.1974.0062
Green, A.E., Zerna, W.T.: Theoretical Elasticity, second edn. Clarendon Press, Oxford (1968)
Greenhill, A.G.: On the strength of shafting when exposed both to torsion and to end thrust. Proceedings of the Institution of Mechanical Engineers 34 (1), 182–225 (1883). URL http://dx.doi.org/10.1243/PIME_PROC_1883_034_013_02
Haslwanter, T.: Mathematics of three-dimensional eye rotations. Vision Research 35 (12), 1727–1739 (1995). URL http://dx.doi.org/10.1016/0042-6989(94)00257-M
Healey, T.J.: Material symmetry and chirality in nonlinearly elastic rods. Mathematics and Mechanics of Solids 7 (4), 405–420 (2002). URL http://dx.doi.org/10.1177/108128028482
Healey, T.J., Mehta, P.G.: Straightforward computation of spatial equilibria of geometrically exact Cosserat rods. International Journal of Bifurcation and Chaos 15 (3), 949–965 (2005). URL http://dx.doi.org/10.1142/S0218127405012387
van der Heijden, G.H.M., Neukirch, S., Goss, V.G.A., Thompson, J.M.T.: Instability and self-contact phenomena in the writhing of clamped rods. International Journal of Mechanical Sciences 45 (1), 161–196 (2003). URL http://dx.doi.org/10.1016/S0020-7403(02)00183-2
van der Heijden, G.H.M., Thompson, J.M.T.: Helical and localised buckling in twisted rods: A unified analysis of the symmetric case. Nonlinear Dynamics 21 (1), 71–99 (2000). URL http://dx.doi.org/10.1023/A:1008310425967
van der Heijden, G.H.M., Yagasaki, K.: Horseshoes for the nearly symmetric heavy top. Zeitschrift für Angewandte Mathematik und Physik. ZAMP. Journal of Applied Mathematics and Physics. Journal de Mathématiques et de Physique Appliquées 65 (2), 221–240 (2014). URL http://dx.doi.org/10.1007/s00033-013-0319-z
Helmholtz, H.: Ueber die normalen Bewegungen des menschlichen Auges. Archiv für Ophthalmologie 9 (2), 153–214 (1863). URL http://dx.doi.org/10.1007/BF02720895
von Helmholtz, H.: A Treatise on Physiological Optics, vol. III. Dover Publications, New York (1962). Translated from the (1910) third German edition and edited by J.P.C. Southall
Hoffman, K.A., Manning, R.S., Maddocks, J.H.: Link, twist, energy, and the stability of DNA minicircles. Biopolymers 70 (2), 145–157 (2003). URL http://dx.doi.org/10.1002/bip.10430
Ilyukhin, A.A.: Three-Dimensional Problems of the Nonlinear Theory of Elastic Rods. Naukova Dumka, Kiev, Ukraine (1979)
Jawed, M.K., Dieleman, P., Audoly, B., Reis, P.M.: Untangling the mechanics and topology in the frictional response of long overhand elastic knots. Physical Review Letters 115 (11), 118,302 (2015). URL http://dx.doi.org/10.1103/PhysRevLett.115.118302
Kamien, R.D., Lubensky, T.C., Nelson, P., O’Hern, C.S.: Twist-stretch elasticity of DNA. In: Symposia EE - Statistical Mechanics in Physics and Biology, MRS Online Proceedings Library Archive, vol. 463, pp. 43–48 (1996). URL http://dx.doi.org/10.1557/PROC-463-43
Kehrbaum, S., Maddocks, J.H.: Elastic rods, rigid bodies, quaternions and the last quadrature. Philosophical Transactions of the Royal Society of London. Series A. Mathematical, Physical Sciences and Engineering 355 (1732), 2117–2136 (1997). URL http://dx.doi.org/10.1098/rsta.1997.0113
Keller, J.B.: Tendril shape and lichen growth. In: G.F. Oster (ed.) Some Mathematical Questions in Biology; Symposium On Mathematical Biology At The Annual Meeting of The American Association for the Advancement Of Science, San Francisco, California, USA, Jan. 6, 1980, Lectures On Mathematics in the Life Sciences, pp. 257–274. American Mathematical Society, Providence, Rhode Island (1980)
Kelvin, L., Tait, P.G.: A Treatise on Natural Philosophy, Reprinted edn. Cambridge University Press, Cambridge (1912)
Kirchhoff, G.: Über des gleichgewicht und die Bewegung eines unendlich dünnen elastichen Stabes. Crelles Journal für die reine und angewandte Mathematik 56, 285–313 (1859). URL http://dx.doi.org/10.1515/crll.1859.56.285
Kreyszig, E.: Differential Geometry, Revised and reprinted edn. Toronto University Press, Toronto (1964)
Kumar, A., Healey, T.J.: A generalized computational approach to stability of static equilibria of nonlinearly elastic rods in the presence of constraints. Computer Methods in Applied Mechanics and Engineering 199 (25), 1805–1815 (2010). URL http://dx.doi.org/10.1016/j.cma.2010.02.007
Lagrange, J.L.: Mécanique Analytique. In: J.A. Serret, G. Darboux (eds.) Joseph Louis de Lagrange Oeuvres, vol. 11/12, fourth edn. Georg Olms Verlag, Heidelberg (1973)
Lagrange, J.L.: Analytical Mechanics, Boston Studies in the Philosophy of Science, vol. 191. Kluwer Academic Publishers Group, Dordrecht (1997). Translated from the 1811 French original, with an introduction and edited by A. Boissonnade and V. N. Vagliente, and with a preface by C. G. Fraser
Langer, J., Singer, D.A.: Lagrangian aspects of the Kirchhoff elastic rod. SIAM Review 38 (4), 605–618 (1996). URL http://dx.doi.org/10.1137/S0036144593253290
Larmor, J.: On the direct application of the principle of least action to the dynamics of solid and fluid systems, and analogous elastic problems. Proceedings of the London Mathematical Society s1-15 (1), 170–185 (1883). URL http://dx.doi.org/10.1112/plms/s1-15.1.170
Lauderdale, T.A., O’Reilly, O.M.: On transverse and rotational symmetries in elastic rods. Journal of Elasticity 82 (1), 31–47 (2006). URL http://dx.doi.org/10.1007/s10659-005-9022-4
Lauderdale, T.A., O’Reilly, O.M.: On the restrictions imposed by non-affine material symmetry groups for elastic rods: Application to helical substructures. European Journal of Mechanics. A. Solids 26 (4), 701–711 (2007). URL http://dx.doi.org/10.1016/j.euromechsol.2006.10.003
Lewis, D., Ratiu, T., Simo, J.C., Marsden, J.E.: The heavy top: A geometric treatment. Nonlinearity 5 (1), 1–48 (1992). URL http://dx.doi.org/10.1088/0951-7715/5/1/001
Lionnet, T., Joubaud, S., Lavery, R., Bensimon, D., Croquette, V.: Wringing out DNA. Physical Review Letters 96, 178,102 (2006). URL http://link.aps.org/doi/10.1103/PhysRevLett.96.178102
Listing, J.B.: Vorstudien zur Topologie. Göttinger Studien. Vandenboeck & Ruprecht, Göttingen (1848). URL https://archive.org/details/vorstudienzurto00listgoog
Liu, J., Huang, J., Su, T., Bertoldi, K., Clarke, D.R.: Structural transition from helices to hemihelices. PLoS ONE 9 (4), e93,183 (2014). URL http://dx.doi.org/10.1371/journal.pone.0093183
Love, A.E.H.: A Treatise on the Mathematical Theory of Elasticity, fourth edn. Cambridge University Press, Cambridge (1927)
Majumdar, A., Prior, C., Goriely, A.: Stability estimates for a twisted rod under terminal loads: A three-dimensional study. Journal of Elasticity 109 (1), 75–93 (2012). URL http://dx.doi.org/10.1007/s10659-012-9371-8
Majumdar, A., Raisch, A.: Stability of twisted rods, helices and buckling solutions in three dimensions. Nonlinearity 27 (12), 2841–2867 (2014). URL http://dx.doi.org/10.1088/0951-7715/27/12/2841
Männer, J.: On the form problem of embryonic heart loops, its geometrical solutions, and a new biophysical concept of cardiac looping. Annals of Anatomy - Anatomischer Anzeiger 195 (4), 312–323 (2013). URL http://dx.doi.org/10.1016/j.aanat.2013.02.008
Manning, R.S.: Conjugate points revisited and Neumann-Neumann problems. SIAM Review 51 (1), 193–212 (2009). URL http://dx.doi.org/10.1137/060668547
Manning, R.S., Rogers, K.A., Maddocks, J.H.: Isoperimetric conjugate points with application to the stability of DNA minicircles. Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences 454 (1980), 3047–3074 (1998). URL http://dx.doi.org/10.1098/rspa.1998.0291
Marko, J.F.: Stretching must twist DNA. Europhysics Letters 38 (3), 183–188 (1997). URL http://stacks.iop.org/0295-5075/38/i=3/a=183
Marko, J.F., Siggia, E.D.: Bending and twisting elasticity of DNA. Macromolecules 27 (4), 981–988 (1994). URL http://dx.doi.org/10.1021/ma00082a015. Errata for this paper were published on page 4820 of Volume 29
Marsden, J.E., Ratiu, T.S.: Introduction to Mechanics and Symmetry: A Basic Exposition of Classical Mechanical Systems, Texts in Applied Mathematics, vol. 17, second edn. Springer-Verlag, New York (1999). URL http://dx.doi.org/10.1007/978-0-387-21792-5
Marshall, J.S., Naghdi, P.M.: A thermodynamical theory of turbulence. I. Basic developments. Philosophical Transactions of the Royal Society of London. Series A. Mathematical and Physical Sciences 327 (1595), 415–448 (1989). URL http://dx.doi.org/10.1098/rsta.1989.0001
McMillen, T., Goriely, A.: Tendril perversion in intrinsically curved rods. Journal of Nonlinear Science 12 (3), 241–281 (2002). URL http://dx.doi.org/10.1007/s00332-002-0493-1
Mielke, A., Holmes, P.: Spatially complex equilibria of buckled rods. Archive for Rational Mechanics and Analysis 101 (4), 319–348 (1988). URL http://dx.doi.org/10.1007/BF00251491
Naghdi, P.M.: The theory of shells and plates. In: C. Truesdell (ed.) Linear Theories of Elasticity and Thermoelasticity: Linear and Nonlinear Theories of Rods, Plates, and Shells, pp. 425–640. Springer-Verlag, Berlin, Heidelberg (1973). URL http://dx.doi.org/10.1007/978-3-662-39776-3_5
Naghdi, P.M.: On the formulation of contact problems of shells and plates. Journal of Elasticity 5 (3–4), 379–398 (1975). URL http://dx.doi.org/10.1007/BF00126998
Naghdi, P.M.: Finite deformation of elastic rods and shells. In: D.E. Carlson, R.T. Shield (eds.) Proceedings of the IUTAM Symposium on Finite Elasticity, Bethlehem PA 1980, pp. 47–104. Martinus Nijhoff, The Hague (1982)
Naghdi, P.M., Rubin, M.B.: Constrained theories of rods. Journal of Elasticity 14, 343–361 (1984). URL http://dx.doi.org/10.1007/BF00125605
Naghdi, P.M., Rubin, M.B.: On the significance of normal cross-sectional extension in beam theory with application to contact problems. International Journal of Solids and Structures 25 (3), 249–265 (1989). URL http://dx.doi.org/10.1016/0020-7683(89)90047-4
Nizette, M., Goriely, A.: Towards a classification of Euler-Kirchhoff filaments. Journal of Mathematical Physics 40 (6), 2830–2866 (1999). URL http://dx.doi.org/10.1063/1.532731
Nordenholz, T.R., O’Reilly, O.M.: On steady motions of an elastic rod with application to contact problems. International Journal of Solids and Structures 34 (9), 1123–1143 & 3211–3212 (1997). URL http://dx.doi.org/10.1016/S0020-7683(96)00054-6
Novelia, A., O’Reilly, O.M.: On the dynamics of the eye: geodesics on a configuration manifold, motions of the gaze direction and Helmholtz’s theorem. Nonlinear Dynamics 80 (3), 1303–1327 (2015). URL http://dx.doi.org/10.1007/s11071-015-1945-0
Oldfather, W.A., Ellis, C.A., Brown, D.M.: Leonhard Euler’s elastic curves. Isis 20 (1), 72–160 (1933). URL http://www.jstor.org/stable/224885
O’Reilly, O.M.: On constitutive relations for elastic rods. International Journal of Solids and Structures 35 (11), 1009–1024 (1998). URL http://dx.doi.org/10.1016/S0020-7683(97)00100-5
O’Reilly, O.M.: The dual Euler basis: Constraints, potentials, and Lagrange’s equations in rigid body dynamics. ASME Journal of Applied Mechanics 74 (2), 256–258 (2007). URL http://dx.doi.org/10.1115/1.2190231
O’Reilly, O.M.: A material momentum balance law for rods. Journal of Elasticity 86 (2), 155–172 (2007). URL http://dx.doi.org/10.1007/s10659-006-9089-6
O’Reilly, O.M.: Intermediate Engineering Dynamics: A Unified Treatment of Newton-Euler and Lagrangian Mechanics. Cambridge University Press, Cambridge (2008)
O’Reilly, O.M., Sena, M., Feeley, B.T., Lotz, J.C.: On representations for joint moments using a joint coordinate system. ASME Journal of Biomechanical Engineering 135 (11), 114,504–114,504 (2013). URL http://dx.doi.org/10.1115/1.4025327
O’Reilly, O.M., Srinivasa, A.R.: A simple treatment of constraint forces and constraint moments in the dynamics of rigid bodies. ASME Applied Mechanics Reviews 67 (1), 014,801–014,801–8 (2014). URL http://dx.doi.org/10.1115/1.4028099
O’Reilly, O.M., Tan, M.H.: Steady motions of an axisymmetric satellite: An atlas of their bifurcations. International Journal of Non-Linear Mechanics 39 (6), 921–940 (2004). URL http://dx.doi.org/10.1016/S0020-7462(03)00075-1
O’Reilly, O.M., Tresierras, T.N.: On the evolution of intrinsic curvature in rod-based models of growth in long slender plant stems. International Journal of Solids and Structures 48 (9), 1239–1247 (2011). URL http://dx.doi.org/10.1016/j.ijsolstr.2010.12.006
Pai, D.K.: Strands: Interactive simulation of thin solids using Cosserat models. Computer Graphics Forum 21 (3), 347–352 (2002). URL http://dx.doi.org/10.1111/1467-8659.00594
de Payrebrune, K.M., O’Reilly, O.M.: On constitutive relations for a rod-based model of a pneu-net bending actuator. Extreme Mechanics Letters 8 (C), 38–46 (2016). URL http://dx.doi.org/10.1016/j.eml.2016.02.007
Prusinkiewicz, P.: Modeling plant growth and development. Current Opinion in Plant Biology 7 (1), 79–83 (2004). URL http://dx.doi.org/10.1016/j.pbi.2003.11.007
Routh, E.J.: The Advanced Part of a Treatise on the Dynamics of a System of Rigid Bodies, sixth, revised and enlarged edn. MacMillan & Co., London (1905)
Routh, E.J.: The Elementary Part of a Treatise on the Dynamics of a System of Rigid Bodies, seventh edn. Macmillan, London (1905)
Rubin, M.B.: Cosserat Theories: Shells, Rods, and Points. Kluwer Academic Press, Dordrecht (2000). URL http://dx.doi.org/10.1007/978-94-015-9379-3
Rumyantsev, V.V.: Stability of steady-state satellite motion. Cosmic Research 6, 135–138 (1968)
Schlick, T.: Modeling superhelical DNA: recent analytical and dynamic approaches. Current Opinion in Structural Biology 5 (2), 245–262 (1995). URL http://dx.doi.org/10.1016/0959-440X(95)80083-2
Shi, Y., Hearst, J.E.: The Kirchhoff elastic rod, the nonlinear Schrödinger equation, and DNA supercoiling. The Journal of Chemical Physics 101 (6), 5186–5200 (1994). URL http://dx.doi.org/10.1063/1.468506
Shi, Y., Hearst, J.E., Bishop, T.C., Halvorson, H.R.: Erratum: “The Kirchhoff elastic rod, the nonlinear Schrödinger equation, and DNA supercoiling” [J. Chem. Phys. 101, 5186 (1994)]. The Journal of Chemical Physics 109 (7), 2959–2961 (1998). URL http://dx.doi.org/10.1063/1.476848
Shuster, M.D.: A survey of attitude representations. American Astronautical Society. Journal of the Astronautical Sciences 41 (4), 439–517 (1993)
Silk, W., Erickson, R.O.: Kinematics of plant growth. Journal of Theoretical Botany 76 (4), 481–501 (1979). URL http://dx.doi.org/10.1016/0022-5193(79)90014-6
Simmonds, J.G.: A Brief on Tensor Analysis, second edn. Springer-Verlag, New York (1994). URL http://dx.doi.org/10.1007/978-1-4419-8522-4
Simo, J.C., Vu-Quoc, L.: On the dynamics in space of rods undergoing large motions - a geometrically exact approach. Computer Methods in Applied Mechanics and Engineering 66 (2), 125–161 (1988). URL http://dx.doi.org/10.1016/0045-7825(88)90073-4
Sokolnikoff, I.S.: Tensor Analysis: Theory and Applications. John Wiley & Sons, Inc., London (1951)
Stepanov, S.I.: On the steady motions of a gyrostat satellite. Journal of Applied Mathematics and Mechanics 33 (1), 121–126 (1969). URL http://dx.doi.org/10.1016/0021-8928(69)90120-8
Tait, P.G.: On the rotation of a rigid body about a fixed point. Proceedings of the Royal Society of Edinburgh 25 (1868). Reprinted in pages 86–127 of [338]
Thompson, J.M.T., Champneys, A.R.: From helix to localized writhing in the torsional post-buckling of elastic rods. Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences 452 (1944), 117–138 (1996). URL http://dx.doi.org/10.1098/rspa.1996.0007
Timoshenko, S.P., Gere, J.M.: Theory of Elastic Stability, second edn. McGraw-Hill, New York (1961)
Umetani, N., Schmidt, R., Stam, J.: Position-based elastic rods. In: K. Erleben, J. Pettré (eds.) Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, pp. 21–30. Eurographics Association (2014)
Whittaker, E.T.: A Treatise on the Analytical Dynamics of Particles and Rigid Bodies, fourth edn. Cambridge University Press, Cambridge (1937)
Wilson, B.F.: Apical control of branch growth and angle in woody plants. American Journal of Botany 87 (5), 601–607 (2000). URL http://www.amjbot.org/content/87/5/601.abstract
Ziegler, H.: Principles of Structural Stability, second edn. Birkhaüser, Basel (1977). URL http://dx.doi.org/10.1007/978-3-0348-5912-7
Author information
Authors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
O’Reilly, O.M. (2017). Kirchhoff’s Rod Theory. In: Modeling Nonlinear Problems in the Mechanics of Strings and Rods. Interaction of Mechanics and Mathematics. Springer, Cham. https://doi.org/10.1007/978-3-319-50598-5_5
Download citation
DOI: https://doi.org/10.1007/978-3-319-50598-5_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50596-1
Online ISBN: 978-3-319-50598-5
eBook Packages: EngineeringEngineering (R0)