
Abstract
This paper presents the idea of applying a modified “moving trihedral” borrowed from the abstract Theory of the Geometry of Riemann, allowing us to model the random functions L2(Ω, σ, P) of geostatistics, in a special 2-D plane within such trihedral, a feature not available in any software existing in the market. Thus, from working in the R2 space in that trihedral plane, we obtain our results in the R3 physical space, in which we can then derive the desired linear or nonlinear geostatistical results. The method presented here therefore can be considered akin to a kind of spatially adaptative geostatistics. And so, among other applications of this method, it becomes possible to apply geostatistics simply, without the need for a detailed, three-dimensional geological model of the mineralization, defining instead its contours in a simple plane, a feature very useful when modelling irregular veins.
This is a preview of subscription content, log in via an institution.
Buying options
Tax calculation will be finalised at checkout
Purchases are for personal use only
Learn about institutional subscriptionsBibliography
Bateman A (1982) Yacimientos Minerales de Rendimiento Económico. Omega S.A
Chilès J, Delfiner P (2001) Geostatistics modeling spatial uncertainty. Wiley
Do Carmo M (1976) Differential geometry of curves and surfaces. Instituto de Matematica Pura e Aplicada, Rio de Janeiro
Do Carmo M (1979) Geometria riemanniana. Instituto de Matematica Pura e Aplicada, Rio de Janeiro
Guibal D, Remacre A (1984) Local estimation of the recoverable reserves. E.N.S.M.P, France
Lee JM (2013) Introduction to smooth manifolds, 2nd edn. University of Washington, Seattle
Maréchal A, Deraisme J, Journel A, Matheron G (1978) Cours de Géostatistique non Linéaire. C-74 E.N.S.M.P. France
Marín Suárez A (1978) Méthodologie de L’estimation et Simulation Multivariable des Grands Gisements Tridimensionnels. Thèse de Docteur Ingénieur en Sciences et Techniques Minières – Option Géostatistique, présentée à L’école Nationale Supérieure des Mines de Paris
Marín Suárez A (1986) Modelo Geoestadístico de Filones de Almadén. Minas de Almadén S.A, Almadén
Marín Suárez A (2009) Diseño de una Metodología Geoestadística con Geometría de Variedades en Yacimientos Filoneanos. Facultad de Geología, Geofísica y Minas, UNSA, Arequipa
Matheron G (1962, 1963) Traité de Géostatistique Appliquée, vol 1; vol 2. Technip, Paris
Warner FW (1983) Foundations of differentiable manifolds and lie groups. Springer, New York
Acknowledgements
The author would like to acknowledge Dr. Dominique François-Bongarçon, President, AGORATEK International Consultants Inc., for his useful comments.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendices
Annex 1: Frame Theory Riemannian Manifold
1.1 Differentiable Manifolds
A differentiable manifold is a type of manifold (In mathematics, a manifold is a topological space that locally resembles Euclidean space each point. More precisely, each point of an n-dimensional manifold has a neighbourhood that is homeomorphic to the Euclidean space of dimension n.) that is locally similar enough to a linear space to allow one to do calculus. Any manifold can be described by a collection of charts, also known as an atlas. One may then apply ideas from calculus while working within the individual charts, since each chart lies within a linear space to which the usual rules of calculus apply. If the charts are suitably compatible (namely, the transition from one chart to another is differentiable), then computations done in one chart are valid in any other differentiable chart (Warner 1983).
In other words a complex spatial feature can be represented by local, well-behaved, simple patches, possibly of lower dimensions, and under certain mathematical conditions (i.e. differentiability); they accurately describe the entirety of that feature continuously in its space of origin.
Mathematical Definition
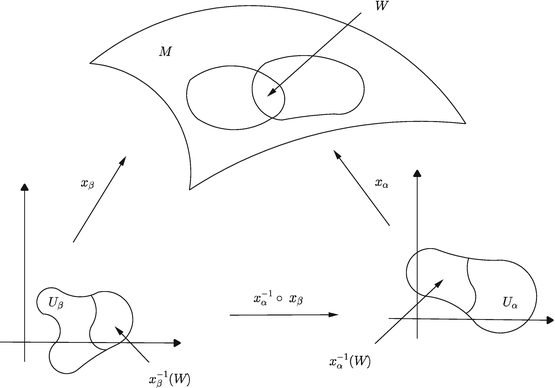
A differentiable manifold of dimension n is a set M and a family of bijective mappings
of open sets U α of ℝn into M such that
-
1.
\( {\cup}_{\alpha}{x}_{\alpha}\left({U}_{\alpha}\right)= M \).
-
2.
For any pair α, β with \( W={x}_{\alpha}\left({U}_{\alpha}\right)\cap {x}_{\beta}\left({U}_{\beta}\right)\ne \phi \), the sets \( {x}_{\alpha}^{-1}(W) \) and \( {x}_{\beta}^{-1}(W) \) are open in ℝn and the mappings \( {x}_{\alpha}^{-1}{\mathrm{ox}}_{\beta} \) are differentiable (see Fig. 1).
-
3.
The family \( \left\{\left({\cup}_{\alpha},{x}_{\alpha}\right)\right\} \) is maximal relative to the conditions (1) and (2).

1.2 Tangent Space on Manifolds
Definition
Let M be a differentiable manifold, and let p be a point of M. A linear map \( v:{C}^{\infty }(M)\to \mathrm{\mathbb{R}} \) is called a derivation at p if it satisfies the Leibniz rule:
The set of all derivations of \( {C}^{\infty }(M) \) at p, denoted by T p M is called a tangent space to M at p. An element of T p M is called a tangent vector at p.
A Riemannian metric on a differentiable manifold M is a correspondence which associates to each point p of M, an inner product 〈, 〉 p on the tangent space T p M, which varies differentiably; this metric is also called the metric tensor.
A differentiable manifold with a given Riemannian metric will be called a Riemannian manifold (Lee JM 2013; Do Carmo 1976).
Annex 2: Applying Methodology in Euclidean Space ℝ3
An example of Riemannian manifold in the Euclidean space ℝ3 is a surface of dimension 2 with the usual metric ℝ3 and the tangent space here is a plane.
2.1 Regular Surface
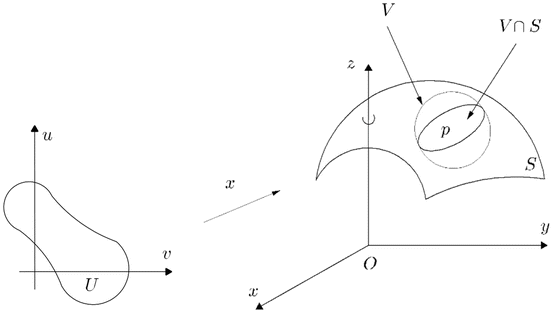
A subset \( S\subset {\mathrm{\mathbb{R}}}^3 \) is a regular surface if, for each \( p\in S \), there exists a neighbourhood Vin ℝ3 and a map \( x: U\to V\cap S \) of an open set \( U\subset {\mathrm{\mathbb{R}}}^2 \) onto \( V\cap S\subset {\mathrm{\mathbb{R}}}^3 \) such that (see Fig. 1):
-
1.
x is differentiable.
-
2.
x is homeomorphism.
-
3.
\( \forall q\in U,{\mathrm{dx}}_q:{\mathrm{\mathbb{R}}}^2\to {\mathrm{\mathbb{R}}}^3 \) is one-to-one.

2.2 The Tangent Plane
Definition
Let \( v\in {\mathrm{\mathbb{R}}}^3 \) be a tangent vector to S at a point \( p\in S \); it exists a differentiable parametrized curve \( \left.\alpha :\right]-\varepsilon, \varepsilon \left[\to S\right. \) with \( {\alpha}^{\prime }(0)= v \) and \( \alpha (0)= p \).
The set of all tangent vectors to S at p will be called the tangent plane to p and will be denoted by T p S (Do Carmo 1976) (see Fig. 2).

2.3 Proposed Trihedron
Now let us build a trihedron, from a point on the surface and a tangent vector to the surface at that point; this construction is a different wing of the trihedron Frenet-Serret; in very specific cases of surface geometry, these may coincide.
Let \( S\subset {\mathrm{\mathbb{R}}}^3 \) a regular surface, parametrization (x,U) at point \( p\in S \) and a regular parametrized curve \( \left.\alpha :\right]-\varepsilon, \varepsilon \left[\to {\mathrm{\mathbb{R}}}^3\right. \) content in S such that \( {\alpha}^{\prime }(0)= v \) and \( \alpha (0)= p \), clearly \( v\in {T}_p S \).
On the T p S tangent plane, rotate the vector v angle π/2 in a sense counterclockwise forming a basis for the tangent plane T p S (see figure). We now vector cross product \( w= v\times u \) and form the proposed trihedron (see Fig. 3).

Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Marín Suárez, A. (2017). Geostatistics for Variable Geometry Veins. In: Gómez-Hernández, J., Rodrigo-Ilarri, J., Rodrigo-Clavero, M., Cassiraga, E., Vargas-Guzmán, J. (eds) Geostatistics Valencia 2016. Quantitative Geology and Geostatistics, vol 19. Springer, Cham. https://doi.org/10.1007/978-3-319-46819-8_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-46819-8_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-46818-1
Online ISBN: 978-3-319-46819-8
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)