
Abstract
Remote sensing (RS)—taking images or other measurements of Earth from above—provides a unique perspective on what is happening on the Earth and thus plays a special role in biodiversity and conservation applications. The periodic repeat coverage of satellite-based RS is particularly useful for monitoring change and so is essential for understanding trends, and also provides key input into assessments, international agreements, and conservation management. Historically, RS data have often been expensive and hard to use, but changes over the last decade have resulted in massive amounts of global data being available at no cost, as well as significant (if not yet complete) simplification of access and use. This chapter provides a baseline set of information about using RS for conservation applications in three realms: terrestrial, marine, and freshwater. After a brief overview of the mechanics of RS and how it can be applied, terrestrial systems are discussed, focusing first on ecosystems and then moving on to species and genes. Marine systems are discussed next in the context of habitat extent and condition and including key marine-specific challenges. This is followed by discussion of the special considerations of freshwater habitats such as rivers, focusing on freshwater ecosystems, species, and ecosystem services.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
8.1 Remote Sensing
Every remotely sensed image of Earth can be considered a biological dataset. Each of these tells a story and a sequence tells the larger story of what is changing over time. Civilian satellite observations of Earth started over 40 years ago and provide an excellent historical record to help assess change. This chapter provides an overview of how remote sensing can be used for biodiversity and conservation applications, emphasizing change assessment. It focuses on satellite-based remote sensing because this provides global coverage with regular repeat cycles, sometimes providing a nearly daily view of the entire Earth, and is often available at no cost.
The potential for applying remote sensing (RS; sometimes referred to as Earth Observation, or EO, though this term is better used to refer to all kinds of observations, not just RS) for monitoring biodiversity and guiding conservation efforts has not been fully realised due to concerns about ease-of-use and cost. Historically, RS data have not always been easy to find or use because of specialised search and order systems, unfamiliar file formats, large file size, and the need for expensive and complex analysis tools. That is gradually changing with increasing implementation of standards, web delivery services, and the proliferation of free and low-cost analysis tools. Although data cost used to be a common prohibitive factor, it is no longer a big stumbling block for most users except where high resolution commercial images are needed.
8.1.1 How Remote Sensing Works
Remote sensing measures the energy that is reflected and emitted from the Earth’s surface (for a good background on RS basics see https://www.nrcan.gc.ca/sites/www.nrcan.gc.ca/files/earthsciences/pdf/resource/tutor/fundam/pdf/fundamentals_e.pdf). Because the properties of materials commonly found on the surface (e.g., plants, soils, phyto-plankton-containing surface waters, ice bodies) are known, RS provides insight into the surface composition. There are also biodiversity-relevant situations which may not be directly observable with RS but which may be correlated with what can be observed. This allows remotely sensed observations to act as a “proxy” for surface activities if sufficient surface measurements are available to establish the link. For example, sea surface height can be measured and is correlated with upwelling and therefore with higher nutrient concentrations that affect the ecosystem in a variety of important ways.
Optical data such as that from the Landsat series of satellites and many others are a measure of the amount of light reflected from Earth’s surface. Typically, the various wavelengths that are reflected are measured in separate “bands”, each of which is stored as a separate image layer. Thus a typical “image” file contains a separate monochromatic image for each band. Creating a natural-looking colour image requires the user to combine red, green and blue bands. Other band combinations can also be used and these can highlight different components of interest in the image, often using wavelengths beyond what our eyes can see, particularly in the near-infrared region. Many optical sensors, including Landsat, have a “thermal” band that measures the long-wave infrared (thermal) radiation emitted from the Earth’s surface, information particularly useful for estimating surface temperature.
The information available for understanding what is happening on the ground increases with the number of bands that a sensor has, but not in a directly proportional way. Thus typical “multi-spectral” sensors with 4 to 20 carefully selected and well-calibrated bands provide a great deal of information, and adding more bands can help with specific issues. “Hyperspectral” sensors can have more than 200 bands and can provide a wealth of information to help, for example, identify specific species. Processing such datasets requires special expertise and satellite-based hyperspectral sensors are not yet common. Other sensor types include radar and lidar which actively emit electromagnetic energy and measure the amount that is reflected—these sensors are useful for measuring surface height as well as tree canopy characteristics and surface roughness. Lidar is generally more precise than radar and ideal for measuring tree height. Radar is particularly useful where cloud cover is a problem (for instance, in the biodiversity-rich tropical rainforests) because it penetrates clouds. However, availability of lidar data is quite limited, and although radar data are more widely available it may be expensive and its use is less intuitive than the interpretation of optical images.
8.1.2 Combining Remote Sensing with in situ Observations
Remote sensing is generally most useful when combined with in situ observations, and these are usually required for calibration and for assessing RS accuracy. RS can provide excellent spatial and temporal coverage, for example, though its usefulness may be limited by pixel size which may be too coarse for some applications. On the other hand, in situ measurements are made at very fine spatial scales but tend to be sparse and infrequent, as well as difficult and relatively expensive to collect. Combining RS and in situ observations takes advantage of their complementary features.
8.1.3 Detecting Change
With the systematic coverage and long time-series provided by satellite observations, RS is particularly useful for detecting change. RS plays a major role in detecting and monitoring global- to local-scale processes that affect ecosystems, species, and ecosystem services, with effects on genes being an emerging field. RS data or its derivatives are an important input to models projecting future states and trends, which can provide an early warning of change and facilitate a timely response. Note, however, that rates of change may be more important than change in absolute conditions, making the frequency of repeats in a time-series, as well as data continuity, very important.
Several key factors require consideration to prevent the appearance of false positives (detection of change when none exists) or false negatives (failure to detect significant change). Because some degree of temporal and spatial variance is inherent in all ecosystems and species distributions and the physical variables that affect them, it is important to match the temporal and spatial scale of the environmental data with that of the ecosystem or species of interest. Such variation can occur over annual, seasonal, daily, or even hourly scales. Matching appropriate RS observations to ecological processes or species distributions often requires a multi-scale approach where one spatial and temporal scale provides information on a portion of an ecological process or species’ life-history while other scales are required to observe another portion.
Next, the role of RS in monitoring Terrestrial, Marine, and Freshwater environments will be discussed. These are treated individually because they differ in many physical respects and RS is often applied in rather different ways.
8.2 Terrestrial
Remote sensing plays a major role in mapping and understanding terrestrial biodiversity. It is the basis of most land cover/land use maps, provides much of the environmental data used in species distribution modelling, can characterise ecosystem functioning, assists in ecosystem service assessment, and is beginning to be used in genetic analyses. Except in cases of direct observation of species, which generally require expensive high resolution images, biological RS data are usually combined with physical data such as elevation or climate (which in fact may be derived from RS data) and, increasingly, with socio-economic data.
8.2.1 Ecosystems
This section discusses the important role that RS can play in monitoring various aspects of ecosystems and the services they can provide.
8.2.1.1 Ecosystem Structure and Composition
Remote sensing is frequently used to generate maps of terrestrial ecosystems, which are often based on a map that delineates different vegetation types or land uses. Figure 8.1 is a simple example of an image that has been classified into five different types of cover based on how the spectral characteristics varied across the landscape (the UN Food and Agriculture Organization, FAO, has tools and information on class determination e.g., http://www.glcn.org, though note that other classification systems exist). One of the simplest and most common maps shows areas of forest and of non-forest, the latter often being a result of conversion to other uses. One point to remember is that it is essential that such maps be calibrated and validated with ground observations, otherwise the level of mis-classification can be very high, as well as unknown. Note that even with ground calibration such maps are often only about 80 % accurate, meaning that one pixel in five is classified incorrectly. Another point to remember is that spectrally similar vegetation types will be put in the same class. For example, tree plantations such as oil palm may be spectrally similar to native vegetation and both could be placed in the ‘forest’ class, and often are. Also note that classified maps use discrete categories, yet the actual landscape often varies continuously from one habitat to another, so the cut-off between classes can be somewhat arbitrary.

Example of a simple classification with five classes. A national park in Thailand is in the centre of the image—a heart-shaped plateau surrounded by forest on the downslope, and then agriculture (source Classified Landsat image courtesy of Martin Wegmann)
In practice there are several classification techniques. The oldest is simply to visually interpret an image, drawing lines at the vegetation boundaries. Positioning these boundaries should combine what can be seen in the image with knowledge of what is known to occur on the ground, thus accurate interpretation requires that the analyst is familiar with the local vegetation. Software can also be used that automatically creates classes based only on spectral properties—the user can select the number of classes and what distinguishes them (i.e., how different two pixels must be before they are placed in different classes). This is called an “unsupervised” classification because once the number of classes and the difference thresholds are specified there is no human oversight of the process until the operator labels each class after the software finishes. A “supervised” classification takes a somewhat different approach. Here the user “trains” the software by selecting groups of pixels which are known to correspond to a particular class. A simple example might be to delineate areas of evergreen forest, deciduous forest, and agriculture based on a combination of visual interpretation and ground knowledge. For each of these three classes the software would then find all the other pixels in the image that had similar characteristics and identify them, allowing a map to be created.
Free software exists to do supervised and unsupervised classification, for example, https://www.orfeo-toolbox.org/ and http://www.dpi.inpe.br/spring/. One additional very useful tool is the Rapid Land Cover Mapper (http://lca.usgs.gov/lca/rlcm/), which provides a very simple way of visually mapping Land Use/Land Cover and change; it is free though requires ArcGIS ArcMap software. And increasingly, the open source R statistical software (http://www.r-project.org) is being used for image analysis, and many classification techniques and other geostatistical models can be easily applied to images using existing user-supplied “packages”.
8.2.1.2 Ecosystem Function
Ecosystem function can be thought of as the “work” that is done by an ecosystem. In other words, ecosystem function measures and monitors the energy dynamics as well as exchange of matter within an ecosystem, for example between the biota and the atmosphere, or within the biota. Examples of ecosystem functions include primary production, albedo, land surface temperature, evapotranspiration, as well as functional classifications such as Ecosystem Functional Types that characterise ecosystems based on similarities in energy dynamics or exchange of matter. To give a more concrete example, consider net primary productivity (NPP) which is an Essential Biodiversity Variable for the energy flow through ecosystems. NPP is the amount of biomass produced by an ecosystem within a defined period. Since plant biomass has a fairly constant carbon content, this can also be expressed as the amount of carbon assimilated by photosynthesis minus the carbon released by plant respiration.
8.2.1.3 Ecosystem Change
Ecosystem change usually refers to changes in land cover or land use, and identifying and quantifying it is particularly important. Land cover is a measurement of ecosystem state, and there is only one land cover at a point. Land use is what that land is used for, by people, and is typically defined by the calendar of activities which take place. There can be many land uses for any given land cover: for instance, a forest might simultaneously be used for the harvest of timber and for recreation and water provision. Land use is hard to detect from space, but it can be inferred from land cover and other remotely sensed attributes, and validated and enriched using ground-observed information. Evaluating the conversion of forest to non-forest is a common application for which images taken at two different times are compared (Fig. 8.2). The comparison can be done visually or using automated software; maps can then be made and the number of pixels that have changed calculated to provide a measure of forest loss. Recently, global maps of forest cover change at 30 m have become available at no cost, and these will be updated periodically (see http://earthenginepartners.appspot.com/science-2013-global-forest; and http://www.globalforestwatch.org/). Such maps may prove useful for users needing forest cover change information, however, local accuracy can vary significantly so users should be very careful to validate the information for their location. Beyond just forest conversion it is also possible to map how individual classes of vegetation or land use are changing, and to indicate what each class is changing into. This can be useful in trying to understand what the causes and consequences of change are.

Monitoring forest loss. In this example from Rondonia, Brazil, images from 2000 and 2013 are compared and the difference, indicating loss of forest, is shown in red in the 3rd panel. A simple two class (“forest” and “clearing”) supervised classification, using software such as that mentioned, can be used for such analyses. In this example the percentage of pixels classified as forest in 2000 was 65 %, while in 2013 it was 20 % (with 15 % not falling into either class, e.g., clouds and urban areas) (source ASTER images courtesy of NASA and Japan’s METI; classification courtesy of Michael Abrams)
8.2.1.4 Ecosystem Services
Ecosystem services are comprehensively covered in Chap. 3; this section focuses on how terrestrial ecosystem services are measured and monitored remotely.
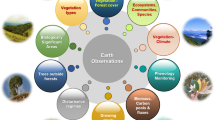
Ecosystem services are rarely if ever directly sensed with RS, rather, an ecosystem response is sensed as an indicator of status or change in a service (Fig. 8.3). Often one remotely sensed variable can be used to infer a range of ecosystem service changes through different model interpretations and interactions with other variables. For example, greenness measures such as the Normalized Difference Vegetation Index (NDVI) indicate plant vigour and potential productivity and can be used to indicate agricultural output (when the crop species is known), phenology, and CO2 respiration. System status signals are related to ecosystem services through a number of pathways because biota are integrators of many physical and chemical factors in the environment. In other words the biophysical dimension of ecosystem services has seen the most application of RS when estimating provisioning and regulation. There have been few attempts to retrieve cultural services.

Remote sensing is used indirectly to evaluate changes in ecosystem services
The process of inferring an ecosystem service from a remotely sensed ecosystem state often requires additional information and a considerable amount of modelling. For example, to estimate crop production output, information on phenological stage, water availability, or structure may be required in addition to remotely sensed greenness level; the modelling capability to combine this information would also be needed. Ecosystem services that can be estimated through this process include productivity; biomass; water availability, timing and quality; ecosystem regulating processes like those affecting CO2 and methane release; and bio-sequestration rates (see Fig. 8.3).
8.2.2 Species
Remote sensing can play a particularly important role in helping to understand where species live and in providing measures of diversity such as species richness. Several reviews give more detail and provide references on using RS for biodiversity studies (for example, see Franklin 2010).
8.2.2.1 Mapping Where Species Live
Although it is possible to use RS to directly see and therefore map where some species live, this usually requires expensive, very high resolution data, and is generally only applicable to large organisms or populations of small organisms which are very dominant in the community. And while the status of some populations of large animals (e.g., elephants or whales) can be assessed in this way, traditional methods (e.g., visual surveys from the air) have so far been more cost effective. Mapping the distribution of some tree species may be possible over certain areas but again require very high spatial and/or spectral resolution images. Low-cost (e.g., <US$2000) unmanned aerial vehicles (UAVs) in combination with photogrammetry software are increasingly being adopted as an effective local-scale monitoring tool for applications such as identification of land/benthic cover, wildlife census, and monitoring of illegal activities. Advantages of using UAVs include very high spatial (<5 cm) and temporal resolution that often permit feature identification at the species level. More commonly, in situ observations of the specific locations where a species has been seen are correlated with environmental variables for those locations to develop a model that describes the set of conditions where a species is most likely to be found. This is called species distribution modelling (SDM). Once that model is created it can be combined with environmental data from a broad set of locations to generate a map of the potential distribution of that species—that is, the area where the environment is apparently suitable for that species to live. Many environmental variables, such as topography, land cover, temperature, and precipitation are derived from RS data. Since many are climate-related, SDM has been used to investigate how climate change could affect species distributions by substituting forecasted, instead of historical, climate data into the model. Although useful, correlative SDMs ignore biotic interactions and assume that a species is in equilibrium with environment; such limitations may be especially important when projecting species’ distributions into novel environments such as predicting the impacts of climate change, land use change, and invasive species.
8.2.2.2 Plant Functional Types
Because direct detection and mapping of vegetation at the species level can be difficult, an alternative approach is to use “plant functional types”—groups of species having similar functionality. The principle is that species with similar function will have similar physiology and therefore spectral similarities that allow grouping into spectral or phenotypic—and thus functional—types (Ustin and Gamon 2010). More specifically, areas with the same ecosystem functional type have similar energy dynamics and exchange of matter. Creating appropriate combinations of functional types allows upscaling into vegetation communities, and time series of RS datasets can then be used to assess change at the community level, such as that due to natural or human-caused disturbance, succession, or phenology. All global maps of land cover implicitly or explicitly use the concept of plant function types. For instance, a map of “forest cover” is invoking the type “tree”. Even global maps usually provide more detail than that—“evergreen” versus “deciduous” and “broadleaf” versus “needleleaf” trees can be reliably discriminated using RS, based on spectral and phenological characteristics. Field calibration and validation is, of course, still required to understand and have confidence in the observed changes.
8.2.2.3 Generating Biodiversity Indices
Measures of community diversity such as species richness and abundance can be derived using RS at landscape to global scales. Remotely sensed measures of productivity, water and nutrient status, vegetation structure, phenology, and biochemical diversity are often correlated with diversity metrics for a variety of taxonomic groups, but especially for plants. For example, biochemical diversity extracted from hyperspectral images and structural diversity derived from multispectral imagery have both been used to estimate tree species richness. Reflectance, surface temperature and NDVI from the MODIS and AVHRR sensors describe patterns of primary productivity that are related to continental-scale patterns of tree species richness.
8.2.3 Genes
Landscape genetics is a way to understand how the landscape affects genetic patterns by looking for spatial discontinuities in genetic variation and correlating them with observed landscape features (e.g., Manel et al. 2003). Remote sensing is a good way to characterise the landscape and identify specific landscape features, and thus provides key inputs to these analyses. For example, a landscape genetics approach might explore how habitat fragmentation patterns (visible using RS) correlate with genetic discontinuities such as differences between individuals within and among habitat patches (measured in situ). Because landscape genetics is spatially explicit, incorporating remotely sensed or other spatial landscape data, the approach is more powerful than traditional population genetic approaches to explore the effects of habitat fragmentation on gene flow.
One common landscape genetics method is called least-cost modelling. This builds on an isolation-by-distance population genetic framework, which examines the correlation between measures of genetic “distance” (e.g., how genetically similar or dissimilar two populations are) and the geographic distance separating populations or individuals (geographic distance can lead to isolation of populations by limiting gene flow between them). In least-cost modelling, landscape features are used when determining the easiest (i.e., “least-cost”) routes for gene flow across a landscape (features such as mountains can obstruct gene flow). Least-cost distances thus combine knowledge of species habitat preferences with detailed information on landscape features acquired from RS data, including land use, land cover, or topography. The length of least-cost routes, as well as linear geographic distances, are then correlated with genetic distances. If the correlation is stronger with least-cost distances than with linear distances, then we can infer that something in the landscape has affected the pattern of genetic variation.
In addition to informing studies that explore how habitat fragmentation affects genetic variation, a landscape genetics approach can provide guidance to the selection of conservation areas to maximise adaptive genetic diversity and, thus, future evolutionary potential. Landscape genetics can also be applied in marine realms (seascape genetics) using seawater current, water temperature, or other spatially explicit resource gradient data.
8.3 Marine
Remote sensing of the marine environment is characterised by a number of unique challenges and complexities. Four primary challenges are: (1) the marine environment is profoundly dynamic, with significant change often occurring in sub-daily time steps (e.g., tides, mobile oceanographic features, diel migrations); (2) RS observations generally record only surface conditions, however, biophysical interactions occur throughout the entire water column; (3) the biological entity of interest is often highly mobile and also responds with lags to the physical environment; and (4) the time scales required to properly characterise marine ecosystem processes often do not match RS data collection cycles.
Remote sensing in the marine environment is generally used to identify patterns in biophysical features that can be used to infer ecological processes. Biogeographic patterns in marine data are often the result of multiple interacting processes (e.g., terrestrial runoff, interacting water masses, upwelling nutrient movement, subsurface bathymetric structures, etc.). Often several different RS platforms and measurement methods must be combined to characterise the processes related to biological patterns. As with terrestrial systems, marine biodiversity observing systems are often most successful when RS and in situ measurements are combined. For example, to develop a model that incorporates the feeding habits of a whale species so that the areas where it is likely to be found can be predicted (useful, for example, to re-route ship traffic) requires a lot of location data (aerial and/or ship surveys, or GPS tagging data) as well as RS data collection. The former provides georeferenced data on where the whales have been, while the latter provides information on ocean biophysical condition that the species may be responding to. Gaps in observations are common (e.g., RS images with cloud cover) and can complicate processing and reduce the observations available for model development. However, it is not always necessary to collect new observations because databases containing existing marine species observations are available and can be used as inputs to such species distribution models. For example, one of the largest marine species databases is the Ocean Biogeographic Information System (OBIS) with tens of millions of records and growing, accessible via the web (http://www.iobis.org/).
Ecological patterns and species distributions often respond to biophysical processes at different spatial and temporal scales. Broad, ocean-basin-scale patterns are often best characterised by recording seasonal patterns observed over multiple years or even decades of observations and using relatively low spatial resolution (e.g., ≥1 km). These broad scales of analysis may require processing the corresponding RS observations into standardised “climatologies” of oceanographic features such as sea surface temperature (SST), ocean colour (chlorophyll-a), and sea surface height (SSH) or into derived variables such as fronts, eddies or kinetic energy. The construction of such climatologies allows for the selection and averaging of observations across multiple time periods so that data gaps can be mitigated. In contrast, fine-scale observations of ecological patterns or habitat condition often require instantaneous observations or time series of observations (e.g., benthic reef habitats monitoring, harmful algal blooms, feeding or spawning events, etc.) at higher sampling frequencies and spatial resolutions. Such ephemeral ecological features or events require RS observations tied specifically to the appropriate time period. To facilitate discussion of these challenges, RS of the marine environment is divided into three broad categories: habitat extent, habitat condition, and change.
8.3.1 Habitat Extent
Remote sensing offers a unique perspective to map the extent of shallow benthic or intertidal marine habitats and, in some circumstances, identify and inventory individual key marine species. However, the quality and accuracy of the information extracted from the RS data are closely tied to the level of effort that goes into collecting the in situ observations used to validate mapped features. A common method involves direct mapping of the habitat or species using high or medium spatial resolution images. Examples of benthic habitats that have been mapped using RS include coral reefs, seagrass, and kelp forests (Fig. 8.4). However, given the ever-changing environmental state of the ocean, distinguishing underwater habitats can be challenging, requiring careful planning and selection of RS data (i.e., free of sun glint and water column sediment). Recent RS systems such as Landsat 8 have been designed with new spectral bands that improve water column penetration. Compared to benthic habitats, the mapping of intertidal habitats such as mangroves, beaches, mud flats, rocky shores, or salt marshes is less problematic, but requires coordination of data acquisition with the tides to capture their full extent. Both benthic and intertidal habitats can be mapped using high (<5 m) or medium (5–30 m) spatial resolution imagery by applying classification techniques such as those described in the terrestrial section, automated feature extraction algorithms, or on-screen digitisation methods. Deeper ocean habitats cannot be mapped using space-based optical systems, instead requiring submerged active sensors such as multi-beam sonar, buoy-based instrumentation, and gliders.

An example of freely-available, medium spatial resolution imagery (Landsat ETM+), here used to map benthic habitats near Abaco Island in the Bahamas. a Original image; b image overlaid with extracted coral reef and seagrass polygons. The extraction used a tool to assign pixels with similar spectral, spatial, and/or textural characteristics to the same group, which was then assigned to one of the classes by the analyst (source Steven Schill)
Although marine species such as sea turtles, sharks and marine mammals can be directly observed using very high resolution imagery (<1 m), such images are expensive and often impractical, particularly for surveying large areas. Similar to terrestrial systems, species distribution modelling using physical variables (e.g., bathymetry, seabed sediment, chlorophyll-a, and SST) can predict the potential range of a particular species, the location of a particular habitat (e.g., areas of high productivity), or when combined with a mechanistic model, a biological response. For example, Fig. 8.5 shows predicted patterns of growth in mussels (Mytilus edulis) using chlorophyll-a (and SST, though this is not shown in the figure) as inputs to an energetics model. Similarly, it is sometimes possible to correlate biological diversity with spectral radiance values. This involves extensive georeferenced in situ data coupled with hyperspectral RS data in an attempt to understand biodiversity patterns over large areas. At broader scales, RS data can be used to assess the health and functioning of marine ecosystems at regional and global scales and determine the distribution and spatial variability of several oceanographic phenomena over time. For example, optical sensors such as MODIS, MERIS, and SeaWiFS/OrbView-2 monitor ocean colour, temperature, or primary productivity and can warn of harmful algal blooms or potential coral bleaching events. More recently, RS data from the SMOS and Aquarius/SAC-D sensors are being used to estimate patterns of Sea Surface Salinity, for example measuring the extent of freshwater coastal plumes from rivers and monitoring changes to the global water cycle.

Predictions of mussel growth (cm of shell growth, left panel) in Mount Saint-Michel Bay, France, using chlorophyll-a (µg/L, right panel, using Sea-WIFS data) and sea surface temperature (not shown, using NOAA-18 data) as inputs to a bioenergetics model predicting growth patterns (source Thomas et al. 2011)
8.3.2 Habitat Condition
Some of the most common RS measurements of marine ecosystems include the extent and density (e.g., sparse versus dense seagrass beds) of habitats, but measuring condition is more difficult to assess. This is partly attributed to the high variability of the marine environment, but also the effort needed to properly gather and couple in situ with RS data to calculate indices that can be used to estimate resource condition. These data are often combined into condition indices. For example, biophysical indices such as benthic complexity or rugosity (roughness) have been developed and compared to species diversity in marine applications, and changes in these indices can be indicative of changes in condition due to a disturbance event. SPOT multispectral images have been used to map the spatial distribution of kelps, which drive the biodiversity of many benthic communities, and decreased kelp bed extent can also indicate a change in condition. More generally, there are a variety of indices of biological diversity that use remotely sensed inputs; since diversity can change with condition this approach can help monitor condition itself. One rather direct measure that can help assess the condition of a coral reef is its reflectance, which is visible in satellite images; a bleaching event, such as caused by excessive temperatures, results in a rapid increase in reflectance as the corals expel their symbiotic zooxanthellae.
Recent calls have been made for the development of indices that reflect the condition of commercially or ecologically important processes, such as the provision of nursery habitat, filtration by suspension-feeding invertebrates, sediment stabilisation in coastal environments by reef-forming species, and conditions that lead to the formation of blooms of nuisance and disease-causing organisms. Advancements in ocean colour product calibration are helping to provide water quality assessments in coastal areas (and large inland fresh or saltwater bodies) and making it easier to understand and monitor ecosystem conditions. Additionally, sophisticated condition indices that include multiple parameters such as temperature, light, pH, wind, seasonality, sediments and nutrients are under development.
8.3.3 Detecting Change and Issues of Scale
In the marine environment, matching the temporal and spatial scale of the environmental data with the ecosystem or species of interest is particularly important because they are very dynamic due to tides and currents. However, the match between the biophysical data and species may be multi- or cross-scale. For example, using species distribution modelling to map the habitat of a migratory predator species during the foraging season may require relatively high spatial resolution at high temporal frequency, while understanding where the species migrates may require lower resolution but larger area coverage. Space-time plots are a good way to help identify the appropriate match between spatial and temporal domains: by creating a diagram with spatial and temporal scales on the x and y axes and plotting ecosystem processes or properties in those coordinates, users can visualise multi- and cross-scale dynamics, which can aid sampling design and analysis approaches.
A variety of historical datasets are available to use in change studies, though not all are RS-based. For example, data from the NOAA AVHRR Pathfinder provides research-quality sea surface temperature (SST) data beginning in 1981 at a resolution of 32 km. Retrospective analyses that draw from in situ monitoring and remotely sensed data provide coverage even farther back in time. To go back even farther, the International Comprehensive Ocean-Atmosphere Data Set (ICOADS) is useful, providing data at a 2° × 2° resolution from the early nineteenth century (obviously, not RS-based). Data sets such as the National Centers for Environmental Prediction (NCEP), NOAA Climate Forecast System Reanalysis (CFSR) and NASA MERRA (Modern Era Retrospective-Analysis for Research and Applications) provide extensive coverage at moderate levels of resolution. And recently, NOAA released an “Optimum Interpolation” (OI) product that provides estimates of SST at 0.25° resolution, thus providing an excellent means of detecting rates of change.
Combining RS and in situ observations can be a powerful approach for monitoring and predicting biodiversity and ecosystem function changes because together they provide more parameters over more temporal and spatial resolutions. However, users should be aware that combining both types of observations may lead to false-negatives or mischaracterised change trajectories because changes observable by RS may lag behind other significant changes to an ecosystem. For example, RS can readily observe many structuring species such as large kelps, corals, marsh grasses and intertidal mussel and oyster beds which may either control patterns of diversity in species that use them as habitat, or facilitate other species by acting as ecosystem engineers. However, declines in ecosystem services and functions such as productivity may precede any observable changes in the cover of structuring species. Thus, observing the spatial extent of structuring species may often but not always provide a good measure of biodiversity or ecosystem service change.
8.4 Freshwater
Although they occupy a relatively small portion of the Earth’s surface, freshwater systems play a disproportionate role in driving biodiversity, ecological function and ecosystem services, and freshwater biodiversity is perhaps the most heavily impacted by human activities. Remote sensing for freshwater biodiversity observation relies primarily on observation of the processes that drive freshwater biodiversity rather than direct observation of the biodiversity itself. These can be broadly categorised into biophysical/hydrologic factors and landscape/large scale habitat function and structure. Of these processes, the most readily observable by RS are:
-
Habitat function & structure
-
Land use and land cover change in the watershed (catchment), including deforestation
-
Area and location of rivers, lakes, impoundments and wetlands and habitats such as submerged or emergent macrophytes and riparian forests
-
Habitat connectivity along the water body and to adjacent water bodies and terrestrial ecosystems
-
-
Biophysical/hydrological
-
Water body extent (a proxy for volume) and retention time
-
Hydro-period (the temporal pattern of high and low water)
-
Water column trophic status, especially eutrophication and sediment load
-
Submerged vegetation
-
Invasive alien species (IAS)
-
Direct observation of species and habitats is possible in limited cases—with high spatial and/or spectral resolution data it is possible to directly observe riparian, wetland, and submerged macrophytes and IAS. Such images tend to be expensive, however.
8.4.1 Considerations for Remote Sensing of Freshwater Biodiversity
8.4.1.1 Observing Small Systems from Space: Considering Spatial Scale
Because freshwater systems are relatively small and sparse on the Earth’s surface, careful consideration of scale and resolution is required. A pixel is said to be “mixed” when there are multiple spectral classes contained in the same pixel (e.g., a 30 m pixel that covers a stream and its banks). Pixel mixing can provide a challenge to users, but not necessarily a barrier. For example, it is not possible to estimate lake water quality from a mixed pixel because it is impossible to say how much of the chlorophyll in the pixel is coming from the water column and how much is coming from the riparian/upland vegetation on the edge of the lake. However, with spectral unmixing techniques or other sub-pixel analyses it is possible to estimate how much of that pixel contains water, which is useful for determining inundation and hydro-period.
8.4.1.2 Observing Dynamic Systems: Considering Observation Extent and Frequency
Remote sensing for freshwater biodiversity observation is possible through the observation of the physical and ecological processes that drive biodiversity. Freshwater systems, like marine systems, are highly dynamic, and inundation period, extent and frequency are some of the primary drivers of biodiversity. This can make RS of biodiversity challenging. For example, a single scene may be useful in creating a land cover map, but this snapshot will not capture the variability that drives biodiversity. However, because satellite RS provides regular systematic observations, users can build time series that capture the dynamism of freshwater systems. Using RS to understand freshwater biodiversity requires that users consider both spatial and temporal scales of biodiversity-related processes.
Figure 8.6 shows the most observable ecological processes that drive freshwater biodiversity and the relevant spatial and temporal scales that should be considered for RS. Multiple processes can be observed using data with similar spatial and temporal scales, such as habitat area and land use and change. However, the most effective observations will make use of multiple datasets with different spatial and temporal characteristics to observe multiple biodiversity drivers (see Box 8.1).

Spatial and temporal scales for freshwater biodiversity processes (source Hestir et al. 2015)
Box 8.1. Freshwater systems detectable from space
The number of freshwater systems resolved by satellite RS is dependent on the spatial resolution of the sensor and the size and geometry of the water body. For example, in Europe, nearly all freshwater systems are detectable using Landsat-type sensors (30 × 30 m), and almost half of Europe’s freshwater systems are still detectable using MODIS-type sensors with 250 × 250 m resolution. Whereas in Australia only about 10 % of floodplains and 3 % of lakes and reservoirs can be detected by MODIS type sensors (250 × 250 m) and rivers are not detectable at all. However at the Landsat pixel scale (30 × 30 m), over 70 % of Australian reservoirs, lakes, wetlands and floodplains can be detected.

8.4.2 Approaches for Observing Biodiversity Drivers
For freshwater biodiversity process observations, the most important regions of the electromagnetic spectrum are the optical region (visible to shortwave infrared; 350–2500 nm) and the radar region (microwave; 3.75–7.5 cm or 8–4 GHz). Both optical and radar sensors have their advantages and limitations; these are linked to the driver to be measured and to the sensor specifications. Combining both methods typically leads to improved observations.
The level of processing required can vary depending on the biodiversity process and region of the electromagnetic spectrum. Reflectance and radiance measurements from key spectral bands in the optical region can be helpful in determining properties of habitat function and structure. Band ratios and other indexes highlight key reflectance and absorption characteristics, allowing users to better use reflectance and radiance information for mapping habitat area and extent, watershed land use and forest cover and riparian buffers (Adam et al. 2010).
Radiative transfer inversions are algorithms that use models of light and energy interaction with materials (e.g., plant canopies, water column) to estimate the wetland plant biomass and abundance, submerged vegetation and water column clarity and algal concentrations from RS. By combining RS observations with hydrologic models and field-based measurements, full process characterisation through modelling is readily achieved. Fortunately for most biodiversity assessments, regional or global products using many of these approaches already exist, enabling ease of use in incorporating RS products into freshwater biodiversity observing systems.
8.4.2.1 Ecosystems
Remote sensing of biodiversity drivers is most successful at the ecosystem level where many of the processes driving biodiversity are observable.
8.4.2.1.1 Habitat Function and Structure
Land use/land cover change and forest cover products are readily available globally or for most regions of the world, and products should be selected based on the suitability for a given region and the application. As mentioned earlier, care should be taken when using such wide-area products to ensure they are sufficiently accurate and appropriate for local conditions; remember that land use and land cover products often have average accuracies hovering around 80 % (local accuracies can be less). Remote sensing can also directly map the area and extent of habitat, typically by mapping wetland, floodplain and riparian vegetation, or by mapping the area of lakes. The latitudinal connectivity of a river—its connection to the floodplain and wetlands—is observed directly from identification of the riparian buffer and from water inundation mapping.
8.4.2.1.2 Biophysical/Hydrological Characteristics
Inundation mapping over a time-series of satellite observations provides information about the water extent and retention time and the hydro-period for a freshwater system. Water column trophic status can be determined from estimates of chlorophyll, sediment and coloured dissolved organic matter concentration, or from estimates of water clarity/Secchi depth using optical RS.
8.4.2.1.3 Vegetation Community Detection
Vegetation community identification is typically approached through classification procedures similar to those described in the terrestrial section of this chapter. These procedures work because they take advantage of a physical characteristic of green vegetation: strong absorption of red and blue wavelengths by the chlorophyll in the surface layers, and reflectance in the near infrared from the inner cell structure. Measuring reflectance in those wavelengths can be related to vegetation properties such as biomass or stress, which are the first order properties used for mapping the specialised vegetation communities that occupy different wetland zones and are good proxies for habitat diversity.
8.4.2.2 Species and Ecosystem Services
To further detail classification to species level or to identify intrinsic species characteristics or processes, airborne hyperspectral sensors may be needed since current spaceborne systems do not have sufficient spatial or spectral resolution for this, and the small size of many wetland communities can make airborne monitoring practical. In submerged aquatic plant communities species differentiation may be possible because the fine spectral bands measured by a hyperspectral sensor allow for more precise characterisation of individual plant species reflectance. This type of data can then be linked to intrinsic plant physiological processes. For example, it is possible to use hyperspectral reflectance characteristics and stable isotope markers to distinguish native submerged plant species from submerged IAS because they use different photosynthetic pathways. This information can provide insight into IAS adaptation traits for freshwater ecosystems (Santos et al. 2012). Using hyperspectral data, it is also possible to measure the foliar chemistry of inundated plants or other biotic communities such as the cyanobacteria commonly associated with harmful algal blooms (HABs). These allow inferences about the status of freshwater ecosystem services such as safe drinking water, nutrient cycling/eutrophication and carbon cycling. However, additional datasets are usually required for these inferences, such as laboratory samples of foliar chemistry, photosynthetic rates, respiration rates, stable isotope concentrations, biomass, and other measurable properties of plant species.
8.5 Conclusions
Remote sensing has a major role to play in monitoring changes in biodiversity and ecosystems. Space-based RS is typically global and provides periodic, repeat images that make it particularly appropriate for monitoring. Although, historically, cost and ease of access has been a problem these barriers have largely disappeared and continue to diminish. Because of these historical barriers, and because the RS community and the “traditional” conservation community tend to be separate, the use of RS has not yet been fully assimilated into standard biodiversity conservation practices. The RS community needs to continue to reach out to the broader conservation community and to simplify access to images and the derived products that the broader community need. These actions will facilitate greater use and integration and increase the return on the huge investment in RS infrastructure.
Despite its value, RS does have limitations. Its full value is typically only realised when combined with in situ measurements, which tend to be labour intensive and may not be available for a particular area. Given their often sparse nature it is usually necessary to interpolate between points; interpolation allows the generation of a surface depicting the characteristics of interest. Clouds are often an obstacle, particularly in the wet tropics, and although radar sensors can penetrate clouds radar data is not universally accessible (ESA’s Sentinel-1 is starting to change this), and radar has its own set of limitations. Hyperspectral data can provide much more detailed information than typical multispectral sensors such as Landsat or Sentinel-2, but such data are, currently, available only on a very limited basis.
Limitations aside, RS currently provides a tremendous amount of information of value for understanding and monitoring biodiversity and how it is changing. Changes in terrestrial ecosystems that RS can monitor include changes in ecosystem extent, forest extent, health (e.g., by monitoring greenness, though estimating health can be a challenge) and in functional type. RS also provides a variety of information that facilitates estimating species distributions, and is an essential input into models that estimate overall biodiversity and how it is changing. It is also used in landscape genetic studies that correlate ecosystem patterns with genetic distributions, and in understanding how ecosystem services change over time. Marine ecosystem monitoring also depends on RS, where it is used to identify patterns in biophysical features that are correlated with ecological processes. While benthic ecosystems cannot be monitored from space, intertidal areas such as mangroves and salt marshes are commonly monitored. As for terrestrial areas, monitoring marine condition has some limitations, though RS is nonetheless a useful input to marine condition indices. Monitoring freshwater systems has its own unique challenges because they tend to be small and are temporally variable; the parameters most easily monitored include land use and land cover change within the watershed, the extent and temporal variability of water bodies, submerged vegetation, water column trophic status, and sediment and dissolved organic carbon content.
While more can be done to increase access to and use by the broader biodiversity conservation community, RS plays an essential role in monitoring terrestrial, marine and freshwater ecosystems. As more and different types of sensors become available and as coordination with that broader community continues to increase, RS will play an ever-increasing role, providing global, periodic data that can improve our understanding of change as well as how society responds.
Notes
- 1.
To avoid potential mixed pixels, we considered a freshwater system to be “detectable” if it is 4 times larger than the pixel.
References
Adam, E., Mutanga, O., & Rugege, D. (2010). Multispectral and hyperspectral remote sensing for identification and mapping of wetland vegetation: A review. Wetlands Ecology and Management, 18, 281–296.
Franklin, J. (2010). Mapping species distributions: Spatial inference and prediction. Cambridge, UK: Cambridge University Press.
Hestir, E. L., Brando, V. E., Bresciani, M., Giardino, C., Mattta, E., Villa, P., et al. (2015). Measuring freshwater aquatic ecosystems: The need for a hyperspectral global mapping satellite mission. Remote Sensing of Environment, 167, 181–195.
Manel, S., Schwarts, M. K., Luikart, G., & Taberlet, P. (2003). Landscape genetics: Combining landscape ecology and population genetics. Trends in Ecology & Evolution, 18, 189–197.
Santos, M. J., Hestir, E. L., Khanna, S., & Ustin, S. L. (2012). Image spectroscopy and stable isotopes elucidate functional dissimilarity between native and non-native plant species in the aquatic environment. New Phytologist, 193, 683–695.
Thomas, Y., Mazurié, J., Alunno-Bruscia, M., Bacher, C., Bouget, J.-F., & Gohinc, F. (2011). Modelling spatio-temporal variability of Mytilus edulis (L.) growth by forcing a dynamic energy budget model with satellite-derived environmental data. Journal of Sea Research, 66, 308–317.
Ustin, S. L., & Gamon, J. A. (2010). Remote sensing of plant functional types. New Phytologist, 186, 795–816.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is distributed under the terms of the Creative Commons Attribution-Noncommercial 2.5 License (http://creativecommons.org/licenses/by-nc/2.5/) which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
The images or other third party material in this chapter are included in the work’s Creative Commons license, unless indicated otherwise in the credit line; if such material is not included in the work’s Creative Commons license and the respective action is not permitted by statutory regulation, users will need to obtain permission from the license holder to duplicate, adapt or reproduce the material.
Copyright information
© 2017 The Author(s)
About this chapter
Cite this chapter
Geller, G.N. et al. (2017). Remote Sensing for Biodiversity. In: Walters, M., Scholes, R. (eds) The GEO Handbook on Biodiversity Observation Networks. Springer, Cham. https://doi.org/10.1007/978-3-319-27288-7_8
Download citation
DOI: https://doi.org/10.1007/978-3-319-27288-7_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-27286-3
Online ISBN: 978-3-319-27288-7
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)