
Abstract
Detection techniques of micro-motion targets have been explored with increasing attention according to its complex and flexible features. In this paper, concepts and existing achievements of micro-motion and micro-Doppler are summarized horizontally from two aspects: micro-motion analysis foundation and techniques, strategies and implement. Addressing this goal, a general micro-Doppler formula is introduced with four typical micro-motion forms. Moreover, several extraction and imaging methods are demonstrated from four perspectives, i.e. radar quantity, micro-motion complexity, other strategies and potential problems. Subsequently, available application on ballistic target recognition and critical issues of this emerging field are proposed, with a prospect towards the trend of development.
Similar content being viewed by others

Keywords
1 Introduction
With the continuous development of signal processing and semiconductor techniques, imaging radar has been widely utilized in both military and civilian fields due to its excellent performance in information acquisition. Compared with the traditional detection and tracking radar for coordinate parameter measurement such as detection, ranging and angle measurement, the imaging radar, which is extensively exploited, can acquire high-resolution images of the observation target or scene then extract its shape, size and other information [1].
As anthropic exploration activities have shown a tremendous increase in space, the amount of spatial micro-motion targets such as satellites and space debris has risen sharply. Due to their high moving velocity and complex motion forms, these space targets not only affect the normal operation of spacecraft, but also pose a threat to homeland security. Consequently, there is an urgent need for developing techniques on space situational awareness, air defense and anti-missile based on the high-resolution imaging, feature extraction and recognition of radar 3-dimensional micro-motion targets.
Imaging radars are mainly categorized into Synthetic Aperture Radar (SAR) [2, 3] and Inverse Synthetic Aperture Radar (ISAR) [3, 4]. Among them, ISAR achieves high resolution by applying a large time-bandwidth product, and simultaneously high azimuth resolution by exploiting the inverse synthetic aperture array formed by the relative motion between the target and the radar. Generally, while the entire target or target component is moving, there always exists a micro-motion (or micro-dynamics) other than centroid translation such as vibration, rotation and accelerated movement [5]. For high-resolution imaging radars, target micro-motion is defined as the small motion of the whole target or some components in the direction of the radar’s line of sight (LOS) compared with the radial distance between the target and the radar. For representative space targets such as space debris, warheads and decoy targets, micro-motion is generally classified into certain forms as spins, precession, nutation, roll and swing [6]. Relatively, the corresponding frequency modulation generated when a target’s micro-motion implements a phase modulation to the radar echo is called micro-Doppler signal. The micro-Doppler effect, apparently, refers to the phenomenon about extra modulation caused by micro-motions [1].
Gone are the days when micro-Doppler signals were regarded as unfavorable factors rather than meritorious information because of the rudimentary signal processing technology. It was only until 2000 when the concept of micro-motion and micro-Doppler was officially introduced and applied in microwave radar observation by V. C. Chen from the US Naval Research Laboratory, that the observation and utilization of the micro-Doppler effect becomes prevalent [7,8,9,10]. The improvement of the radar detection refinement avoids the micro-Doppler signal being simply removed any more. On the contrary, it is used to characterize the target’s attribute type and motion intent after feature extraction, by which, the abundant information, e.g. structure, shape, motion state, material properties and stress state becomes available [11]. Since then, worldwide scholars have increasingly devoted themselves to the research on feature extraction, imaging and recognition techniques of micro-motion targets, in which domain, significant and remarkable achievements have been accomplished.
Most of research papers and surveys nowadays [7, 11,12,13,14] have provided a unambiguous prospect of techniques about micro-motion observation according to the dimension from the data processing process. For instance, article [11] analyzes the existing micro-motion models, feature extraction, imaging and recognition techniques in data processing order. Based on the existing surveys, this paper summarizes the available micro-motion feature extraction and imaging techniques horizontally from the perspective of analysis foundation and implementation strategies. Respectively, this paper is divided into the following parts. Section 2 introduces the premier basis of micro-motion analysis, e.g. modeling and summarizes four general micro-motion models along with several practical problems. Section 3, from the perspective of techniques, strategies and implement, arranges the existing research on micro-motion, which consequently consists of four sub-perspectives: radar quantity, target motion complexity, other methods and related problems. Then, various of application and potential development trend of the micro-motion target are briefly introduced in Sect. 4. Finally, Sect. 5 concludes the whole paper and discuss our further research directions in micro-motion target domain.
2 Micro-motion Analysis Foundation
2.1 General Micro-motion Model
When analyzing a micro-motion target, it is initial to construct a micro-motion model that includes rotation, vibration, roll, and cone motion [15]. Under the consideration of computational simplicity, the point where the energy of the target surface is concentrated is always selected as the reference point. Accordingly, the micro-motion scattering model is used to describe the physical characteristics of the target. After that, the micro-Doppler characteristics of each micro-motion form are analyzed.
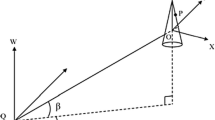
The frequency modulation characteristics of the radar echo hold the topmost position when it comes to micro-Doppler, which can be obtained by the phase information \( \phi \left( t \right) \) of the echo. Moreover, phase information has a strong influence on the instantaneous distance \( R\left( t \right) \) between the radar and the target. The distance is a function of time, which reflects the variation of the radial distance between the target and the radar. Therefore, the foremost requirement when studying micro-Doppler characteristics is to determine the instantaneous distance \( R\left( t \right) \) between the radar and the target [6, 16]. By establishing a universal target motion model as illustrated in Fig. 1, the general formula of micro-Doppler can be obtained as formulation (1), where \( \varvec{V}\left( t \right) \) is the velocity vector caused by micro-motion [6].

Radar and micro-motion target
It can be seen that, the main difference between Doppler feature and micro-Doppler feature is that the former reflects the motion state of the target as a whole, while the latter only reflects that of the target local moving component, that is, the former is produced by overall translation, and the latter is produced by local micro-motion [6]. Therefore, essentially speaking, the micro-Doppler features can be regarded comparably as the Doppler features, which means characteristic information can be attained by implementing invertion to original signal.
Based on the model mentioned above, by altering the micro-motion matrix of the five motion forms, the customized model for each micro-motion forms can be obtained, as summarized in Table 1 [6, 16, 17].
2.2 Practical Problems
The aforementioned universal model is based on the ideal assumption of point scattering without considering the impact of several environmental factors in practice. In the real environment, however, observation of translation and micro-motion often encounters subtle but impactive incidents, such as the irregular shapes of targets, fluctuation of radar signal strength, occlusion effects, etc., which should also be taken into consideration in actual observations.
In addition to an individual target, when ISAR is used to observe a micro-motion target, a single radar beam may contain multiple micro-motion targets, such as a broken satellite debris group [11, 18, 19]. Echo aliasing occurs when the distance between the targets is tiny. Since the sub-target micro-motion form and the micro-motion parameters are both altered, the high-resolution imaging method for a single micro-motion target will no longer be applicable. In [20], a high-resolution imaging method for micro-motion group targets based on augmented Lagrangian function is proposed. Under the complex conditions of Gaussian noise, self-occlusion and mutual occlusion, and singular values, the method can recover the track matrix of the micro-motion group target, implement the separation of the track matrix of the sub-object, and obtain the high-resolution imaging results.
The reason why the micro-motion is difficult to detect is because that it is generally combined with translation and other forms of motion. There are various solutions and strategies for disparate motion complexity. Translation, combined with simple and regular micro-motions, such as rotation and regular vibration, can be modeled separately and analyzed by disassembling the type of motion [6]. In contrast, more often than not, the motion forms of most targets show greater complicacy, such as tanks, ships and animals, etc. These movements, accompanied by complex micro-motions, can only be analyzed specifically by a combination with customized motion models for custom modeling analysis, which is obviously more difficult.
3 Techniques, Strategies and Implement
Existing technical applications for micro-motion targets rely mostly on adaptive improvements of specific algorithms and strategies, which show an obvious similarity even in different application domain. Therefore, instead of presenting techniques from the perspective of separate procedures as article [11], e.g. micro-motion feature extraction, imaging and recognition, in this section, we will summarize current researches on the basis of the quantity of radars, micro-motion complexity, other specific methods and common problems, which hopefully provides readers a horizontal understanding of micro-motion detection fields.
3.1 From the Perspective of Radar Quantity
Techniques Based on Monostatic Radar [21, 22]. Monostatic radar is widely used in radar feature extraction and imaging due to its low cost, system simplicity and operational flexibility. The core idea is to carry out customized and accurate modeling according to the type of space target. By analyzing and extracting the micro-Doppler parameters of the target echo, the 3-dimensional structure and motion characteristics of the micro-motion scattering point are constructed. However, on account of the quantitative limitation of radars, it is difficult to observe other micro-motion components of the target apart from the radial distance of the radar, thus hard to determine the virtual spatial position of the target.
When it comes to monostatic radar, the bandwidth of detecting radar is also worthy of consideration [23]. Paper [24] implements a research on phase derived ranging (PDR) based on wideband radar, which shows a giant efficiency on feature extraction.
Techniques Based on Monostatic Radar.
Due to the motion complexity of the moving target, its micro-Doppler cannot be fully and accurately represented by traditional monostatic radars. In this case, two [25] or more radars are utilized to observe and acquire data from different angles. Distributed radars and networked radars possess the ability to collect the projection components of the micro-motion target from various perspectives, and analyze the spatial 3-dimensional motion and structural features, thus improving the target recognition capability of the radar system. Then with a correlation processing, the 3-dimensional image is synthesized. Although it overcomes the impossibility of a single radar collecting data in all directions, the existing method is still utopian because the anisotropy of the actual target makes the imaging more complicated and untoward.
Paper [26] proposed a scheme utilizing the multi-view feature of networked radar to construct a nonlinear equation and extracting the 3-dimensional precession characteristics of the ballistic target. In [27], with interferometric processing and ellipse fitting method, the real 3D scattering distribution information and 3D micro-motion characteristics of the space rotation target can be attained by using only a single multi-antenna narrow-band radar, which meanwhile shows a high precision and significantly reduces the complexity of the system implementation and the requirements of the radar signal bandwidth. However, it is merely practicable in certain micro-motion forms.
Interferometric Processing.
Interferometric ISAR imaging exploits the difference of time and spatial information between target echoes to image the target in three dimensions [28]. The technique is a 3-dimensional imaging method combining space and time with not only the rotation of the target relative to the radar line of sight under time lapse but also the spatial variation between the target scattering point and the radar under disparate antennas or different observation angles. The interferometric method, on the basis of data source, can be categorized into different arc segment imaging and disparate receiving antenna imaging. In addition, it has a classification of interferometric imaging based on motion model analysis and that based on data self-focusing according to the motion compensation method [29]. The micro-Doppler effect theory is combined with multi-antenna interferometric processing technique in [27], and a 3-dimensional imaging and micro-motion feature extraction method based on L-type 3 antenna model is proposed.
3.2 From the Perspective of Micro-motion Complexity
For Simple Micro-motions, a Parametric Approach Can be Leveraged for Analysis. Parametric methods usually conform to the assumption that the micro-motion form satisfies some parametric model properly, such as spin model, precession model and so on. This type of method shows robustness to complex imaging conditions such as echo defects and low signal-to-noise ratio. However, when the category of motion model is unknown, model mismatch is easy to occur. Moreover, heavy calculation burden is also a disadvantage when the micro-motion form is complicated [15].
For Complex Micro-motions, a Non-parametric Approach is More Appropriate.
Non-parametric techniques mainly include time-frequency analysis methods and imaging methods based on scattering point track matrix.
It is a common way to extract micro-Doppler features and imaging by applying time-frequency analysis, which basically reconstructs characteristics by domain transformation to improve the distribution structure of the micro-Doppler signal in the original domain, thereby removing redundant features [30]. Time-frequency analysis is classified into linear [31, 32] and nonlinear: linear including short-time Fourier transform, wavelet analysis, etc. [6], while nonlinearity includes Cohen-like time-frequency distribution, Wigner-Ville distribution (WVD), Smoothed-Pseudo Wigner-Ville Distribution (SPWVD) and so on.
Another non-parametric method is scattering point track matrix method, which exploits the matrix singular value decomposition method to realize the 3-dimensional reconstruction for the scattering point of the micro-motion target. In [15], a 3-dimensional high-resolution imaging method for single micro-motion target based on track matrix decomposition is presented (see Fig. 2), which is robust to complex micro-motion forms and reduces the complexity of parametric imaging methods.

Algorithm flow diagram of a 3D imaging method for single micro-motion target based on track matrix decomposition [15].
3.3 Other Strategies
Empirical Mode Decomposition (EMD). It was proposed by NASA’s N. E Huang et al., with the main idea to decompose the complex signal into the sum of a finite number of Intrinsic Mode Functions (IMFs) and the remainders. In [33], the time-frequency distribution, variable-sampling filtering as well as the fast Fourier transform (FFT) tools are utilized to extract the micro-Doppler spectrum. Based on this, the motion and geometric parameters of the micro-motion target are estimated. In [34], the method of TFD-Hough transform is proposed, that is to build accurate signal model, design the curve of the corresponding time-frequency distribution map according to the frequency variation form of the signal, and then extract features.
Sparse Reconstruction.
According to the sparse characteristics of micro-motion echo, it is possible to analyze the micro-Doppler signal by the sparse reconstruction method [35, 36]. Generally, by constructing a micro-motion target parameter estimation model based on sparse representation, the estimation problem is transformed into a sparse solution problem, which can be solved by applying greedy tracking algorithm [37] and convex optimization method [38]. In [39], the dictionary linear transformation and sparse solving algorithm are combined, and a flow algorithm of micro-motion parameter estimation based on sparse representation is designed. As well, the performance of the algorithm is examined experimentally.
Physical Characteristics.
Due to the specific combat purpose and operational environment, space precession targets have their own unique physical characteristics, including geometric features and motion characteristics [34]. The physical characteristics of the micro-motion target can be extracted according to the correspondence between the geometry of the target, the micro-motion parameters and the micro-Doppler parameters in a micro-Doppler model. In paper [34], taking the space ballistic missile warhead as an example, the geometric and motion characteristics of the space precession target are analyzed, and the micro-Doppler parameters are estimated by the parameterized TFD-Hough transform method. Then they extract the physical characteristics of the micro-motion target by mapping the relationship between the physical characteristics and micro-Doppler parameters.
3.4 Potential Problems and Common Solutions
As a consequence of the complexity of micro-motion and the limitation of current technology, there are several intractable problems as following in micro-motion target detection:
Translation Compensation Problem.
In general, the target’s micro-motion is always combined with translation. The uniform and accelerated motion of the target will shift and broaden its micro-Doppler, which causes a significant influence on translation detection. Therefore, compensation is the basis for feature extraction and imaging. In [40], a detailed theoretical analysis of this phenomenon is carried out. In allusion to the difficulty of traditional ISAR imaging method to compensate accurately under low SNR, an adaptive low-noise-noise ratio ISAR translation compensation and imaging method based on a phase derivation of spectrum signal and particle swarm optimization is proposed, which as well achieves a well-focused ISAR measured data imaging result with low SNR. Besides, paper [41] put forward a fast translation compensation method suitable for high-speed ballistic targets. Paper [42] introduce a novel ISAR motion compensation approach via phase-derived velocity measurement (PDVM) technique to extract micro-motion feature.
Image Registration Problem.
Image registration is one of the key steps of interferometric processing. The accuracy of the interference phase, thus the quality of the 3-dimensional image depends directly on how the image registration is. Image mismatch in interferometric imaging includes both image shift and image distortion, the former being derived from the distance and velocity difference between the target and the two antennas, while the latter being derived from the relative rotation between the target and the two antennas. Article [29] discusses the constraints of image distortion by creating specific image motion models.
Phase Error Problem.
When imaging spatial targets, in the target body coordinate system, the azimuth and elevation angles in the radar line of sight change non-uniformly at the same time, leading to a non-uniform rotation of the imaging plane. There is, accordingly, a phase error if applying the traditional ISAR imaging method. Moreover, interferometric imaging requires high accuracy of image phase, so it is essential to correct the phase error of the ISAR image. In [29], based on the relative rotation law between space target and radar, a spatial target echo model after translation compensation is established. The model is used to analyze the influence of image defocus and phase error on the interference caused by nonlinear phase. As well, an ISAR imaging method based on fractional Fourier transform is proposed to solve this problem.
In conclusion, the research on micro-motion target detection technique is still in its infancy, in which domain, without any doubt, increasing effort should be devoted to solve the existing tough issues.
4 Applications and Prospects
Radar space target imaging technique based on micro-motion features has become a vital branch of radar research domain through micro-motion target modeling, micro-motion feature extraction and micro-motion target imaging. The coming decades will see a broad application prospects of micro-motion technique in military fields such as space security, air defense and anti-missile, territorial security and strategic early warning.
4.1 Applications on Ballistic Target Recognition
One of the most significant applications of the micro-motion target recognition technique in the military field is ballistic target recognition in the midcourse section [27, 43, 44]. Article [33], taking the ballistic missiles as an example, discusses the application of the radar feature extraction technique of the micro-motion target. Firstly, the target scene is designed, the echo signal is simulated, and then the micro-Doppler and Doppler are extracted. Moreover, RCS modulation features and micro-motion resolution features provide new technical support for air target and space target detection and recognition. Paper [30] proposes a time selection imaging method by abor transformation and time-frequency analysis.
4.2 Prospects
With the continuous breakthrough of techniques and the deepening of research, fresh and effective solutions for micro-motion target echo modeling, feature extraction and 3D imaging have emerged and verified by measurement and experiment. However, there are still several directions yearning for revolutionary achievement of radar micro-motion target detection in the following aspects:
Group Target Detection.
At present, the existing techniques mainly focus on one single micro-motion target rather than a target group, which actually is the most normal case. When establishing a micro-motion model and extracting features for group target, the primary consideration is how to effectively remove interference or overlap and perform low-error separation when the sub-target micro-motion parameters are similar.
Big-Data-Driven Feature Extraction and Radar Imaging Analysis.
With the increasing progress of radar micro-motion target detection, the database based on the characteristics and images of micro-motion targets will be gradually improved, which provides a new possibility for the subsequent research direction. Through data analysis and data mining based on big databases, certain patterns of micro-motion target recognition and imaging methods will be proposed. A revolutionary analysis model can also be constructed by using artificial intelligence techniques, such as deep learning [45], neural networks, etc.
Improvement of Transmission Media.
How to use the newly-emerging bands for micro-Doppler analysis becomes a hot topic in the case of the increasingly serious congestion of the traditional electromagnetic wave band [11]. The existing technologies such as terahertz wave [46] and ultrasonic, with fine-grained recognition, strong robustness and low cost, are relatively suitable for application in the field of micro-motion target detection.
5 Conclusion Remarks
By investigating the existing radar techniques for micro-motion targets, this paper summarizes the concepts and methods as well as current difficulties and probable solutions in two subjects: micro-motion analysis foundation and techniques, strategies and implement. In the analysis foundation part, the universal micro-Doppler formula is quoted, along with classic motion matrices under 4 typical micro-motion forms, as well as practical problems. Then in the strategies and implement part, several common extraction and imaging methods are summarized in four perspectives, i.e. radar quantity, micro-motion complexity, other strategies and potential problems. Finally, the representative application of ballistic target recognition and imaging technique and potential development directions are prospected. This paper, as a survey, can be regarded as a horizon snapshot in the field of radar micro-motion detection and imaging.
References
Qun, Z., Ying, L.: Micro-Doppler Effect of Radar Targets (2013)
Curlander, J.C., Mcdonough, R.N.: Synthetic Aperture Radar-Systems and Signal Processing. Wiley, New York (1991)
Franceschetti, G., Lanari, R.: Synthetic Aperture Radar Processing, 2nd edn. (2016)
Curlander, J.C., Mcdonough, R.N.: Synthetic Aperture Radar- Systems and Signal Processing. Wiley, New York (1991)
Zhang, Q., Luo, Y., Chen, Y.-A.: Micro-Doppler Characteristics of Radar Targets. Elsevier, New York (2016)
Guangfen, C.: Micro-Doppler Signature Analysis of Radar Targets and Its Applications. Xidian University (2014)
Chen, VC.: Analysis of radar micro-Doppler with time-frequency transform. In: Proceedings of the Tenth IEEE Workshop on Statistical Signal and Array Processing (Cat. No. 00TH8496), pp. 463–466. IEEE (2000)
Chen, V.C., Li, F., Ho, S.-S., et al.: Analysis of micro-Doppler signatures. IEE Proc. Radar Sonar Navig. 150, 271–276 (2003)
Chen, V.C., Li, F., Ho, S.-S., et al.: Micro-Doppler effect in radar: phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 42, 2–21 (2006)
Chen, V.C., Ling, H.: Time-Frequency Transforms for Radar Imaging and Signal Analysis. Artech House, Boston (2002)
Qun, Z., Jian, H., Ying, L., et al.: Research progresses in radar feature extraction, imaging, and recognition of target with micro-motions. J. Radars 7, 531–547 (2018)
He, M.: Research on Some Techniques of ISAR Imaging for Space Micro-Motion Targets. University of Electronic Science and Technology of China (2017)
Encheng, H.: Research on ISAR Imaging Algorithm for Spatial Target. Harbin Institute of Technology (2017)
Xiang, L., Xunzhang, G., Yongxiang, L.: Research advances in ISAR imagery of complex motion target. J. Data Acquis. Process. 29, 508–515 (2014)
Yongguo, L.: Study on 3D High-Resolution Imaging of Micro-motion Targets. Xidian University (2017)
Huang, X., Zhang, S., Liu, Y.: Analysis of radar micro-motion model. In: 2018 International Conference on Electronics Technology (ICET), pp. 162–165 (2018)
Jing-Ke, Z., Da-Hai, D., Shi-Qi, X., et al.: Analysis of InSAR 3D imaging characteristics of target with rotational micro-motion. J. Astronaut. 35, 345–355 (2014)
Yongxiang, L., Hangyong, C., Li, X., et al.: Radar micro-motion target resolution. In: 2006 CIE International Conference on Radar, pp. 1–4 (2006)
Yongsheng, G., Hongwei, L., Feng, C.: Micro-motion targets resolution in a high noise environment. In: 2009 IET International Radar Conference, pp. 1–5 (2009)
Prickett, M., Chen, C.: Principles of inverse synthetic aperture radar/ISAR/imaging. In: EASCON 1980; Electronics and Aerospace Systems Conference, pp. 340–345 (1980)
Zhang, L., Xing, M.D., Qiu, C.W., et al.: Two-dimensional spectrum matched filter banks for high-speed spinning-target three-dimensional ISAR imaging. IEEE Geosci. Remote Sens. Lett. 6, 368–372 (2009)
Bai, X., Xing, M., Feng, Z., et al.: High-resolution three-dimensional imaging of spinning space debris. IEEE Trans. Geosci. Remote Sens. 47, 2352–2362 (2009)
Mérelle, V., Gaugue, A., Louis, G., et al.: UWB pulse radar for micro-motion detection. In: 2016 8th International Conference on Ultrawide band and Ultrashort Impulse Signals (UWBUSIS), pp. 152–155 (2016)
Fan, H.-Y., Ren, L.-X., Mao, E.-K.: A micro-motion measurement method based on wideband radar phase derived ranging. In: IET International Radar Conference 2013, pp. 1–4 (2013)
Deng, D.H., He, J., Wang, M., et al.: A method for extracting micro-motion feature of target with rotating parts based on Bi-ISAR system. In: Proceedings of 2011 IEEE CIE International Conference on Radar, pp. 524–527 (2011)
Dong, Z.: Extraction of three-dimensional precesion features of balistic targets in neted radar. J. Xidian Univ. 42, 146–151 (2015)
Jian, H., Ying, L., Qun, Z., et al.: Three-dimensional interferometric imaging and micro-motion feature extraction of ballistic targets in wideband radar 39, 1865–1871 (2017)
Kai, H., Wei-Dong, J., Xiang, L.: Wideband imaging method for micro-motion target based on coherent Doppler interferometry. Syst. Eng. Electron. 36, 239–247 (2014)
Lizhi, Z.: Research of interferometric 3D ISAR imaging for space target. Beijing Institute of Technology (2015)
Ge-Nong, L., Jie, Z., Ning-Ning, T., et al.: Ballistic target ISAR imaging based on time-frequency analysis. J. Air Force Eng. Univ. (Nat. Sci. Ed.) 42–45 (2015)
Yuxue, S., Ying, L., Qun, Z., et al.: Time-varying three dimensional imaging for space rotating targets with stepped-frequency chirp signal, pp. 23–31 (2018)
Yuan-Qing, Z., Long, C., Qun, Z., et al.: Micro-motion feature extraction based on DMFT for space target. Mod. Def. Technol. 42, 42–47 (2014)
Hang-Yong, C.: Research on Radar Signature Extraction from Targets with Micro-motions. National University of Defense Technology (2006)
Jin, L.: Radar Signal Parameter Estimation and Physical Feature Extraction of Micro-Motion Targets. National University of Defense Technology (2010)
Chen, C., Zhang, L., Luo, Y., et al.: An ISAR imaging algorithm for micro-motion targets with sparse aperture. In: IET International Radar Conference 2015, pp. 1–5 (2015)
Yi-Jun, C., Hua, G., Guo-Zheng, W., et al.: Micro-motion feature extraction and targets imaging with sparse aperture. Mod. Def. Technol. 42 (2014)
Tropp, J.A., Gilbert, A.C.: Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 53, 4655–4666 (2007)
Candes, E., Romberg, J., Tao, T.: Robust uncertainty principles: exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 52, 489–509 (2004)
Kangle, L.: Research on Feature Extraction and Parameters Estimation for Radar Targets with Micro-motions. National University of Defense Technology (2010)
Lei, L.: Study of Two-dimensional and Three-dimensional Inverse Synthetic Aperture Radar Imaging Method (2016)
Xun, H.: Research on Recognition of Space Cone-shaped Targets based on Narrowband Radar Feature. Xidian University (2015)
Guo, L., Fan, H., Liu, Q., et al.: Analysis of micro-motion feature in ISAR imaging via phase-derived velocity measurement technique. In: Radar Conference (2017)
Cun-Qian, F., Jing-Qing, L., Si-An, H.: Micro-Doppler feature extraction and recognition based on netted radar for ballistic targets. J. Radars 4, 609–620 (2015)
Cunqian, F., Rong, C., Darong, H., et al.: Three-dimensional imaging of ballistic targets with vanes based on netted radar. J. Electron. Inf. Technol. 40, 517–524 (2018)
Lecun, Y., Bengio, Y., Hinton, G.: Deep learning. Nature 521, 436 (2015)
Qi, Y., Bin, D., Hongqiang, W., et al.: Advancements in research on micro-motion feature extraction in the Terahertz region. J. Radars 7, 22–45 (2018)
Acknowledgements
This paper is supported by the National Key Research and Development Program of China through project 2017YFB0802502, by the Aeronautical Science Foundation of China through project 2017ZC51038, by the National Cryptography Development Fund through project MMJJ20170106, by the foundation of Science and Technology on Information Assurance Laboratory through project 61421120305162112006, by the National Natural Science Foundation of China through projects 61672083, 61532021, 61472429, 61402029, 61702028 and 61571024.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Zhu, H., Wang, J., Chen, Y. (2019). A Survey of Radar Signature Analysis and Applications on Space Targets with Micro-motions. In: Gui, G., Yun, L. (eds) Advanced Hybrid Information Processing. ADHIP 2019. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 302. Springer, Cham. https://doi.org/10.1007/978-3-030-36405-2_29
Download citation
DOI: https://doi.org/10.1007/978-3-030-36405-2_29
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-36404-5
Online ISBN: 978-3-030-36405-2
eBook Packages: Computer ScienceComputer Science (R0)