
Abstract
This paper tests three methods, based on template matching, the watershed transform and the sliding band filter, for the identification of stones circles, a natural pattern formed in periglacial regions of the Earth. All the methods take advantage of the 3D shape of the structures conveyed by Digital Elevation Models (DEM). The DEMs were built from milimetric imagery captured by Unmanned Aerial Vehicles (UAV) in Barton Peninsula, King George Island, Antarctica (\(62^\circ \)) during a field campaign developed in 2018. The best results were achieved by the sliding band filter method with a F score of \(83.9\%\).
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Stone circles are a type of natural patterned ground formed in periglacial environments easily attracting the attention due to its remarkable circular geometry (Fig. 1). These metric circular shapes, occurring in clusters of tens to thousands of individuals, are formed in frost-susceptible soils due to freezing and thawing cycles [1] in a convection-like circulation of soil in the active layer of permafrost [2]. Besides their evident geomorphic importance, the periodic burial and exhumation of geological materials may play an important role in the soil carbon cycle in connection to permafrost conditions, designating the stone circles as potential paleoclimatic indicators [3]. Although the processes underlying their formation and evolution are relatively well understood [4], their geometric characteristics, dating and seasonal dynamics are supported by sampling and monitoring few circles [5], preventing obtaining robust statistics and an extended spatial analysis of large fields.

Stone circles observed from UAV in Barton Peninsula, King George Island (Antarctica), acquired by IST team in February 2018.
Imagery with mili - to centimetre resolution captured by UAV can greatly contribute to a much more complete geomorphic description of this type of patterned ground in large areas giving context to data built at ground-level [6]. The amount of circles involved requires the use of automated methods to make their segmentation, characterisation and also multitemporal monitoring to account for the dynamics of the processes involved. This paper deals only with the initial phase, that is, with the segmentation of the stone circles which, to our knowledge, is addressed for the first time.
2 Data Acquisition
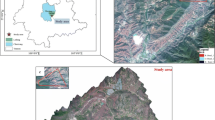
The sites selected for developing the surveys are located in Barton Peninsula of King George Island (62\(^\circ \)S), Antarctica (Fig. 1). This peninsula is an ice-free area of about 12 km\(^2\) and one of the sites in Antarctica where these natural patterns are more ubiquitous [7]. A field campaign was developed during February 2018 by two of the authors of the current work (PP and SH) with logistics support from the Portuguese Polar Program and the Korean Polar Research Institute. The imagery was acquired with a quadcopter DJI Phantom 3 equipped with a RGB camera at low altitude flights (10 m above ground) to allow perceiving stones up to 5 mm in size. The aerial surveys were planned in a double-grid mode with a high overlap (80%) between adjacent images (lateral and frontal) to provide an increased number of views for the same point. The area surveyed in each individual flight, conditioned by battery duration, is about 80 m \(\times \) 80 m and contains about 500 images. The individual images were processed with Agisoft Photoscan software to build orthorrectified image mosaics and digital elevation models (DEM) based on SIFT-Scale-Invariant Feature Transform and SfM-Structure from Motion technique. The resolutions obtained are 2.6 mm/pixel for the orthorectified image (typical size of \(25,000\times 25,000\) pixels) and 1.3 cm/pixel for the DEM (\(5000 \times 5000\) pixels). Smaller square regions from the global mosaic and DEM (5000 and 1000 pixels, respectively) were extracted to be processed with circles detection algorithms, as illustrated in Fig. 2.

Detail of orthorrectified mosaic (left) and respective DEM (right).
3 Detection Methods
Circular structures can be described by their circular shape patterns although several kinds of deformation can be observed in many images. These deformations are related to the process of structure formation along the years and to the slope of the terrain. In the sequel we will present three detection methods that take into account the 3D shape of the structures to be detected.
3.1 Template Matching
Most structures to be detected have a circular shape with a radius that is approximately constant within each site. The radius may change from site to site since it depends on the altitude and characteristics of the soils.
We will assume that the elevation image contain 3D patterns of known shape T(x, y), denoted as template. The fit between the elevation image I(x, y) and the sliding template T(x, y) can be measured by the correlation
that achieves a local maximum when the template is aligned with the circle. The template is chosen as a half torus (Fig. 3)
where R is the radius, \(\epsilon R\) is the torus width (\(\epsilon =0.2\)), and \(x^+=\max (0,x)\) is the rectifier function.

Template: half torus.
The detection of circles is based on the analysis of the correlation matrix R(x, y) by detecting all the local maxima (non-maximum suppression), followed by comparison with a threshold T.
Since the elevation image has some natural slope, the image I is first pre-processed by a high-pass filter. The proposed algorithm depends on two parameters (R, T), radius and threshold.
3.2 Watershed
The internal regions of the circles are relatively flat with their edges corresponding to crests in the elevation data. The watershed transform, which simulates the flooding of a surface from its minima, seems adequate to make their segmentation. The watershed (WS) of the elevation image I corresponds to the skeleton of influence zones (SKIZ) of its minima (\(\min \)) [8]:
Since not all the minima from the elevation image are interesting, namely the deeper ones normally located outside the circular shapes, its filtering can be performed to leave only (ideally) the shallower ones located within each circle. This procedure is done in two steps. First by increasing the regularity of the circular structures by a morphological filter of the type closing \(\phi \) followed by an opening \(\gamma \) of the elevation image I with a disk B as structuring element
and then by discarding the minima whose depth or contrast value exceeds the value h. The interesting and shallower minima (\(\min _S\)) of \(I_f\) are identified through the h-minima transform (HMIN) [8]
where \(R^\varepsilon _I(I+h)\) indicates the reconstruction by erosion of the marker image \((I_f+h)\) into the mask I.
Since it is intended to delineate each circle along its crest line, the minima or seeds upon which the watershed transform will start the flooding procedure are constituted by the union of \(\min _S\) and the border lines of their regions of influence, like performed in a similar delineation problem of impact craters [9].
Finally, a post-processing step based on the morphometric features of the detected objects is performed to filter out small and less circular individuals. The size threshold can be easily fixed, but the circularity C obtained by the index that relates the area A and perimeter P of an object (\(C=4\pi \;A/P^2)\) requires some analysis. Therefore this algorithm depends also on two parameters (h, C).
3.3 Sliding Band Filter
The gradient field of natural circles exhibit radial vector patterns (see Fig. 4). To detect such patterns, we adopt a modified version of the sliding band filter (SBF) proposed in [10] for the detection of cells in microscopy images. The problem addressed in this paper is slightly different, however, since the gradient of cell images points inwards while the gradient of natural circles points inwards and outwards, depending on the distance to the center.

Gradient field of torus (left) and natural stone circle (right).
Let us assume that we know the center of the circle \(c=[x,y]^T\) and let us define N radial directions starting from c, with angles \(\theta _i =2\pi i/N, i=0, \dots , N-1\). Along each direction we will measure the alignment between the gradient direction and the radial orientation \(\theta _i\), given by
where \(\phi _i(r)\) denotes the direction of the gradient field at a point \(c + r [\cos (\theta _i), \sin (\theta _i)]^T\). The gradient orientation changes when the point is located at the circle boundary. To detect the boundary we will perform template matching along each direction and choose the radius \(r_0\) that corresponds to the highest peak. Therefore, the best alignment in direction \(\theta _i\) is
where \(T=u(r+{\varDelta })-2 u(r)+u(r-{\varDelta })\) is the template (u(r) denotes the unit step signal). Since there are N radial directions, the global alignment is the sum of all the directional alignments
The previous expressions provide the alignment score associated to the center hypothesis \(c=[x,y]^T\). In practice we do not know c. What we do is to compute the alignment score for each image point, c, and detect the circle centers by non-maximum suppression and thresholding (see Fig. 5).
To be specific, the gradient vector is computed by using Sobel masks and its magnitude is compared with a threshold: gradients with small magnitude are discarded.

Alignment score as a function of the circle center.
4 Results
The algorithms were evaluated on a dataset of six DEMs from two sites, with size \(1000\times 1000\) pixels. These images include a variety of cases ranging from regions with a stationary quasi-periodic structure to highly unorganized regions.
4.1 Performance Measure
To evaluate the performance of the proposed algorithms, ground truth (GT) information was built by visually detecting all the circles and annotating their centers.
Since the algorithms also produce a set of centers, we need to establish a correspondence between the detected centers and the ground truth information. This was achieved by using a simple matching algorithm defined as follows. First, we build a matrix of distances from all the GT centers to all the detected centers. The minimum element of the matrix is found (excluding the diagonal elements) and the corresponding points are matched, provided that the minimum distance is smaller than a threshold \({\varDelta }\). If two points are matched they are considered as a true positive (TP) detection and the corresponding line and column are removed from the distance matrix. The process is repeated until there are no more candidates for matching. The ground truth points which were not matched are considered as false negatives (FN) and the detected points that were not matched are considered as false positives (FP).
The performance of the detection algorithm is characterized by the well known measures
The F-score combines the precision and recall in a single measure.

Examples from 2 field sites: outputs of template matching (top), watershed (middle) and SBF (bottom). Colour code: true positives (green), false positives (red) and false negatives (yellow). (Color figure online)
Figure 6 shows the performance of the proposed methods in two images extracted from different sites. The example on the left is well organized and quasi-periodic while the example on the right is much more difficult. For each example we show the ground truth information (circles), the detected objects (crosses) and the TP (green), FN (yellow) and FP (red). In the case of the watershed and SBF methods, we also show the circle boundaries (yellow). All the methods detect most of the natural circles present in the image, despite the fact that the dynamic range presents small changes on the order of centimetres.
4.2 Statistical Evaluation
The parameters associated with each method were chosen experimentally: \(R=35\) pixels, \(T=0.4\) for template matching method, \(h=10\) cm, \(C=0.70\) for watershed method, and \(N=16\), \({\varDelta }=7\), threshold \(= 70\%\) of maximum peak amplitude for SBF method. Then, we processed the six images with the three methods and for each image we computed precision, recall and F-score. The mean and standard deviation of all these measures are shown in Table 1. The best results were obtained by SBF method which achieves a F-score = 83.9%. The template matching and watershed method achieve worse performances (F-scores = 70.3% and 71.3%, respectively).
Figure 7 displays the three statistics (precision, recall and F-score) obtained by the three methods in each of the test images highlighting the superiority of SBF method.

Precision (blue point), recall (green square) and F score (red cross) for the three methods in each of the six images. (Color figure online)
5 Conclusions
This paper presents a new problem: the detection of stone circles in periglacial terrains. The information used to estimate such structures consists of elevation data built after optical imagery, captured by a UAV in Antarctica (Project CIRCLAR2 from the Portuguese Polar Program).
The structures have a circular shape, exhibiting several types of deformation due to the natural processes involved in their formation and development along centuries. Three automatic algorithms are described, exploiting the shape information, based on template matching, watershed transform and sliding band filter (SBF). The methods are evaluated in six elevation images (\(1000\times 1000\) pixels) achieving an F score ranging from \(70.3\%\) to \(83.9\%\). The best results were achieved by SBF method that clearly outperforms the other two. This is probably related to the assumptions made in each method. Template match makes strong rigidity assumptions about the object shape, the watershed-based is probably too flexible. The SBF filter presents a more appropriate trade-off between shape assumptions and deformation.
There are several open issues to be addressed in the future. One concerns shape deformation. The assumption of rigid scales adopted in template matching is perhaps too hard and should be studied. A second issue concerns multiple scales since the size of the natural circles change, depending on the type of material and altitude. One promising direction for future research concerns the combination of multiple detection algorithms and the use of multi-scale methods.
References
Washburn, A.L.: Geocryology: A Survey of Periglacial Processes and Environments. Wiley, New York (1980)
Hallet, B.: Stone circles: form and soil kinematics. Philos. Trans. R. Soc. A 371, 20120357 (2013)
Kaab, A., Girod, L., Berthling, I.: Surface kinematics of periglacial sorted circles using structure-from-motion technology. Cryosphere 8, 1041–1056 (2014)
Kessler, M.A., Murray, A.B., Werner, B.T., Hallet, B.: A model for sorted circles as self-organized patterns. J. Geophys. Res.-Solid Earth 106, 13287–13306 (2001)
Jeong, G.Y.: Radiocarbon ages of sorted circles on King George Island, South Shetland Islands, West Antarctica. Antarct. Sci. 18, 265–270 (2006)
Pina, P., Vieira, G., Bandeira, L., Mora, C.: Accurate determination of surface reference data in digital photographs in ice-free surfaces of Maritime Antarctica. Sci. Total Environ. 573, 290–302 (2016)
López-Martínez, J., Serrano, E., Schmid, T., Mink, S., Linés, C.: Periglacial processes and landforms in the South Shetland Islands (northern Antarctic Peninsula region). Geomorphology 155–156, 62–79 (2012)
Soille, P.: Morphological Image Analysis. Principles and Applications, 2nd edn. Springer, Heidelberg (2003). https://doi.org/10.1007/978-3-662-05088-0
Pina, P., Marques, J.S.: Delineation of impact craters by a mathematical morphology based approach. In: Kamel, M., Campilho, A. (eds.) ICIAR 2013. LNCS, vol. 7950, pp. 717–725. Springer, Heidelberg (2013). https://doi.org/10.1007/978-3-642-39094-4_82
Quelhas, P., Marcuzzo, M., Mendonça, A.M., Campilho, A.: Cell nuclei and cytoplasm joint segmentation using the sliding band filter. IEEE Trans. Med. Imaging 29(8), 1463–1473 (2010)
Acknowledgements
This work was supported by FCT plurianual funding (UID/EEA/50009/2019 and UID/ECI/04028/2019), project CIRCLAR2 (call 2017-2018 from PROPOLAR-Portuguese Polar Program) and KOPRI-Korean Polar Research Institute for logistics at King Sejong Station in Antarctica, and FCT project SPARSIS PTDC/EEIPRO/0426/2014.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Pina, P., Pereira, F., Marques, J.S., Heleno, S. (2019). Detection of Stone Circles in Periglacial Regions of Antarctica in UAV Datasets. In: Morales, A., Fierrez, J., Sánchez, J., Ribeiro, B. (eds) Pattern Recognition and Image Analysis. IbPRIA 2019. Lecture Notes in Computer Science(), vol 11867. Springer, Cham. https://doi.org/10.1007/978-3-030-31332-6_25
Download citation
DOI: https://doi.org/10.1007/978-3-030-31332-6_25
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-31331-9
Online ISBN: 978-3-030-31332-6
eBook Packages: Computer ScienceComputer Science (R0)
