
Abstract
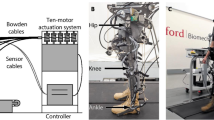
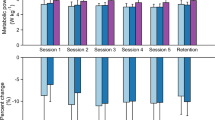
Exosuits and exoskeletons have been shown to reduce the metabolic cost of walking by over 20%. While many studies have shown promising group-averaged data, there has often been high variability in individual response to assistance even when using standardized procedures and device platforms. Here, we aim to investigate the biomechanical differences in adaptation to exosuit assistance, and present initial data from seven subjects that show differences between the joint kinematics and kinetics, and muscle activations of individuals who display small vs large metabolic benefits. Future work will focus on expanding this work to understand general principles for predicting metabolic benefit and understanding sensorimotor adaptations over longer time-scales. We believe this effort will be instrumental towards understanding the potential for exosuit and exoskeleton assistance in gait augmentation and in clinical settings, for both rehabilitative and assistive applications.
K. Swaminathan is also supported by the NSF, and S. Lee is supported by Samsung. This material is based upon the work supported by the NSF (grant #CNS-1446464 and Graduate Research Fellowship), the Wyss Institute, the Paulson School at Harvard and the Technology for Equitable and Assessable Medicine initiative at Harvard.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Mooney, L.M., Herr, H.: Biomechanical walking mechanisms underlying the metabolic reduction caused by an autonomous exoskeleton. J Neuroeng. Rehabil. 13(1), 1 (2016)
Quinlivan, B.T., et al.: Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. Sci. Rob. 2(2), eaah4416 (2017)
Sawicki, G.S., Ferris, D.P.: Mechanics and energetics of level walking with powered ankle exoskeletons. J. Exp. Biol. 211(9), 1402–1413 (2008)
Lee, S., et al.: Autonomous multi-joint soft exosuit for assistance with walking overground. In: ICRA, pp. 2812–2819 (2018)
Gordon, K.E., Ferris, D.P.: Learning to Walk with a robotic ankle exoskeleton. J. Biomech. 40(12), 2636–2644 (2007)
Ding, Y., Kim, M., Kuindersma, S., Walsh, C.J.: Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Sci. Rob. 3(15), eaar5438 (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Swaminathan, K. et al. (2019). Biomechanics Underlying Subject-Dependent Variability in Motor Adaptation to Soft Exosuit Assistance. In: Masia, L., Micera, S., Akay, M., Pons, J. (eds) Converging Clinical and Engineering Research on Neurorehabilitation III. ICNR 2018. Biosystems & Biorobotics, vol 21. Springer, Cham. https://doi.org/10.1007/978-3-030-01845-0_35
Download citation
DOI: https://doi.org/10.1007/978-3-030-01845-0_35
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-01844-3
Online ISBN: 978-3-030-01845-0
eBook Packages: EngineeringEngineering (R0)