
Abstract
This chapter presents the Ramsey model. It is the benchmark model for most dynamic macroeconomic models that study growth and business cycle phenomena. We first study the deterministic Ramsey model in which the total factor productivity is certain. We contrast the effects of a once-and-for-all change with those of a temporary change in productivity on investment, output, and labor supply. In addition, we distinguish the effects of this change when it is known in advance or only observed at the beginning of the period, t, when the shock occurs. Finally, we also introduce uncertainty with respect to the technology level and discuss the real business cycle (RBC) model.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Notes
- 1.
One way to justify this assumption is that a household with a finite lifetime also cares about the utility of its descendants and applies the same discount factor β to their (representative) lifetime utility.
- 2.
Take care to distinguish between the discount factor β and the discount rate θ > 0 that is given by
$$\displaystyle \begin{aligned} \frac{1}{1+\theta} = \beta \;\; \Leftrightarrow \;\; \theta=\frac{1}{\beta}-1.\end{aligned} $$ - 3.
Why have we added ‘− 1’ in the nominator of the utility function in (2.2) in the case σ≠1? First notice that the additive constant − 1∕(1 − σ) does not change the solution of the utility maximization problem and, therefore, does not affect optimal consumption. Furthermore, we know from calculus that
$$\displaystyle \begin{aligned} \lim_{x\to 0} \left( \frac{a^x-1}{x}\right) =\ln a.\end{aligned} $$Therefore, \(\ln c\) is just the limit of the function (c 1−σ − 1)∕(1 − σ) for σ → 1.
In order to derive the limit formula above, notice that from the L’Hôspital rule—which states that if the functions f(x) and g(x) in the nominator and denominator have the limit equal to zero, limx→∞ f(x) = 0 and limx→∞ g(x) = 0, the value of the limit \(\lim _{x\to 0} \left (f(x)/g(x)\right )\), if it exists, is given by \(\lim _{x\to 0} \left (f'(x)/g'(x)\right )\)—implies
$$\displaystyle \begin{aligned} \lim_{x\to 0} \left( \frac{a^x-1}{x}\right) = \lim_{x\to 0} \left( \frac{a^x \ln a}{1}\right) = \ln a.\end{aligned}$$ - 4.
Appendix 2.1 derives the IES in a simplified two-period model.
- 5.
The elasticity of substitution σ p is defined as follows:
$$\displaystyle \begin{aligned} \sigma_p = \frac{\frac{d\left( \frac{K}{L}\right)}{\frac{K}{L}}}{\frac{d\left( \frac{w}{r}\right)}{\frac{w}{r}}},\end{aligned}$$where w and r denote the marginal products of labor and capital.
- 6.
You are asked to compute the dynamics for the case in which σ p = 3∕4 in Problem 2.1.
- 7.
More generally, an Euler equation is the intertemporal first-order condition for a dynamic choice problem and is usually formulated as a difference of differential equation. Equation (2.12) is also referred to as the Keynes-Ramsey rule that describes the growth rate of consumption as a result of intertemporal utility maximization.
- 8.
By local stability we mean that if we perturb the initial condition slightly, then the system stays in the neighborhood of that steady state. If we use the term global stability, the system returns to the steady state even if the starting point is not very close to the steady state.
- 9.
A recommendable introduction to the methods of calibration is provided by deJong and Dave (2011).
- 10.
- 11.
Of course, we should check whether this number of periods is sufficient to guarantee a smooth approximation of the new steady state. If not, we should increase the number of periods. For example, I first used 40 periods and found the number to be insufficient. Use the computer code and test for different values of the number of periods.
- 12.
Appendix 2.2 provides an overview of how this numerical problem can be solved. The MATLAB/Gauss programs Ch2_ramsey1.m/Ch2_ramsey1.g compute the solution presented in Figs. 2.1, 2.2, 2.3, and 2.4 and can be downloaded from my homepage with all the other programs used in this book.
- 13.
The argument for this result is straightforward: The central planner could also choose to behave exactly the same in the case of an expected change as in the case of an unexpected change. Since he chooses a different policy, this must be superior, and it yields a higher value of the objective function.
- 14.
- 15.
You are asked to compute the Jacobian and its value in Problem 2.2.
- 16.
If you take the eigenvalues of the Jacobian provided in (2.17), the eigenvalues are slightly different due to rounding errors. I used the value of the Jacobian with an accuracy of 10−8 to compute the eigenvalues ρ 1 and ρ 2.
- 17.
In a two-dimensional difference equation system, the steady state is a saddle if one of the eigenvalues has an absolute value below one and the other above. The steady state is locally saddle-path stable if one of the two variables is predetermined and the other is a jump variable (not predetermined). (In addition, divergent paths must be ruled out by boundary conditions.) To learn more about the stability analysis in systems of difference equations, consult Azariadis (1993).
- 18.
We used the condition “c t = c t−1” rather than “c t+1 = c t” so that both functions which are graphed in Fig. 2.5 have the same argument k t (and not k t+1 as in the case “c t+1 = c t”).
- 19.
To verify this statement, differentiate c t with respect to k t and solve for \(k_t= \left (\frac {\alpha }{\delta +n}\right )^{1/(1-\alpha )}\). For β < 1, the value of k t is above the steady state \(k= \left ( \frac {\alpha }{(1+n)/\beta -1+\delta }\right )^{1/(1-\alpha )}\).
- 20.
One can show that all transition paths that start above S remain above and, similarly, that all paths that start below S remain below it. In addition, paths with the same initial capital stock k 0 but with different consumption values c 0 do not cross.
- 21.
- 22.
- 23.
The closer we are to the steady state, the better the fit of our linear approximation will be.
- 24.
In the case of a real matrix \(\tilde T\), the inverse \(\tilde T^{-1}\) of a unitary matrix is just the transpose \(\tilde T'\).
- 25.
Standard software, such as MATLAB or Gauss, provides commands to compute the Schur factorization. MATLAB also provides a routine, ordschur(.), that can change the order of the eigenvalues if needed.
- 26.
For those readers interested in numerical linear algebra, a Givens rotation is represented by a matrix transformation. In our problem, we search for a matrix
$$\displaystyle \begin{aligned} G=\left( \begin{array}{cc} d & -e\\ e & d \end{array}\right)\end{aligned}$$that helps to transform \(\tilde S\) into \(S=G\tilde S\).
- 27.
Notice that the coefficient of the first-order difference equation is equal to the stable root of the Jacobian, ρ 1 = 0.9242.
- 28.
For a better illustration of the dynamics during the early periods 1–20, I only used 40 periods for the number of transition periods. Although the adjustment is not complete after 40 periods, the approximation is close during periods when the technology shock increases to Z t = 1.1. The MATLAB/Gauss program Ch2_ramsey2.m/Ch2_ramsey2.g computes the solution presented in Fig. 2.9.
- 29.
In 2004, Finn E. Kydland and Edward C. Prescott received the Nobel prize for their research on RBCs.
- 30.
The second theorem of welfare economics states that any efficient allocation can be sustained by a competitive equilibrium and, thus, constitutes the converse of the first theorem.
- 31.
Two basic types of business cycle models are presented by RBC models, in which only real variables enter the model, and New Keynesian models, in which nominal variables enter the model and prices and/or wages are sticky. Both types of business cycle models are described in greater detail in Heer and Maußner (2009), McCandless (2008), and Cooley (1995).
- 32.
The notation of rational expectation was originally introduced by Muth (1961).
- 33.
Some time series are also available as monthly data, e.g., industrial production and employment. Some other economic variables such as distributional measures of income and consumption concentration in the form of their Gini coefficients, however, are only available on an annual basis, rendering the analysis of the short-term distributional effects of economic policy more difficult.
- 34.
In some studies, the technology level follows a unit root process with trend
$$\displaystyle \begin{aligned} \ln Z_t = \ln Z_{t-1} + a +\epsilon_t, \;\;\; \epsilon_t \sim N(0,\sigma^Z),\end{aligned}$$where a denotes the drift or growth rate of total factor productivity. The modeling of the technology process (and, more generally, time series of macroeconomic variables) is not an innocuous assumption and affects business-cycle results. For example, Cogley and Nasan (1995) demonstrate that if pre-filtered series are first-order integrated, then HP-filtering of the series may result in business cycles that do not exist in the original pre-filtered data.
- 35.
Basu, Fernald, and Kimball (2006) construct a measure of technology change in the presence of variable capacity utilization and imperfect competition.
- 36.
The calibration of RBC models with respect to the characteristics of other industrialized countries employs similar values, e.g., Heer and Maußner (2009) estimate ρ Z = 0.90 and σ Z = 0.0072 for the German economy.
- 37.
Notice that we interchanged the derivative and the expectational operator to derive the first-order conditions using:
$$\displaystyle \begin{aligned} \frac{d}{dx} \mathbb{E} f(x,Z) = \mathbb{E}\frac{d}{dx} f(x,Z).\end{aligned}$$This condition holds if f(x, Z) is integrable for all x and f is differentiable with respect to x. Furthermore, the expected value of Z is finite, \(\mathbb {E}(Z)<\infty \). The above equation is a special application of the Leibniz integral rule according to which
$$\displaystyle \begin{aligned} \frac{d}{dx} \left( \int_{a(x)}^{b(x)} f(x,Z)\; dZ \right)= f(x,b(x))\cdot \frac{d}{dx} b(x)-f(x,a(x))\cdot \frac{d}{dx} a(x)+ \int_{a(x)}^{b(x)} \frac{\partial }{\partial x} f(x,Z) \;dZ. \end{aligned}$$ - 38.
Therefore, our approximation is fairly close to the steady state but becomes increasingly inaccurate with increasing distance from the steady state. Linear approximation is a useful technique for the behavior of economies during tranquil times. During periods of severe crisis such as the Great Recession of 2007–2008, one should instead apply global approximation methods, as described in Chapters 5 and 6 in Heer and Maußner (2009).
- 39.
The computation of the policy functions is described in greater detail in Appendix 2.3.
- 40.
The MATLAB and Gauss programs, Ch2_rbc.m and Ch2_rbc.g, compute the policy functions, the impulse responses, and the time series statistics.
- 41.
Empirical studies such as Galí (1999) and Basu, Fernald, and Kimball (2006) find that a positive technology shock led to a contraction of labor inputs. The standard RBC model is inconsistent with this observation. In Sect. 4.5.2, we present a New Keynesian model with sticky prices and adjustment costs of capital that is able to account for this fact.
- 42.
Sometimes, the researcher also cuts the first 50 periods or similarly from the simulation so that the initialization of the state variables in the first period with their steady state values does not have any effect on the results.
- 43.
The paper had already circulated as a discussion paper two decades earlier and was then introduced as a working paper by Hodrick and Prescott in 1980 that was published in 1997.
- 44.
For a more detailed description of this filter and its computation, see for example, Chapter 12.4 in Heer and Maußner (2009).
- 45.
- 46.
The data are described in more detail in Appendix 2.4.
- 47.
The statistics are computed with the help of the MATLAB or Gauss programs Ch2_data.m and Ch2_data.g.
- 48.
For the risk-free rate and the real equity return rate, we restrict our attention to the period 1959:Q2–2015:Q2. To construct the inflation rate for the computation of the real return, we use the price index for Private Consumption Expenditures (Excluding Food and Energy), which is only available during the period 1959:Q1–2015:Q2.
- 49.
The parameter β = 0.99 in the RBC model is often calibrated to imply an annual real interest rate of 4%, which is a midpoint between the real returns of T-Bills and US equity.
- 50.
In the case of the interest rate or equity return, which are already measured in percentage points, we do not take the log but rather apply the HP filter to the original series.
- 51.
This approximation follows from a first-order Taylor series expansion
$$\displaystyle \begin{aligned} f(x) \approx f'(x_0) (x-x_0) \end{aligned}$$with \(f(x)=\ln (1+x)\) and x 0 = 0 implying:
$$\displaystyle \begin{aligned} \ln (1+x) \approx \frac{1}{1+x_0} (x-x_0)= x.\end{aligned}$$ - 52.
In Problem 2.6, you are asked to analytically demonstrate this result.
- 53.
The toolbox is available as the Gauss source file toolbox.src from my homepage.
- 54.
This appendix is intended to offer a short introduction to the ideas of solution methods using a simple example. A much more detailed technical description with a generalization to multi-dimensional problems is provided in Chapter 2.4 of Heer and Maußner (2009) or in Chapter 6.8 of McCandless (2008).
- 55.
References
Attanasio, O., & Low, H. (2004). Estimating Euler equations. Review of Economic Dynamics, 7, 406–435.
Auerbach, A. J., & Kotlikoff, L. (1987). Dynamic fiscal policy. New York: Cambridge University Press.
Azariadis, C. (1993). Intertemporal macroeconomics. Oxford: Blackwell.
Basu, S., Fernald, J. G., & Kimball, M. S. (2006). Are technology improvements contractionary?. American Economic Review, 96, 1418–1448.
Baxter, M., & King, R. G. (1999). Measuring business cycles: Approximate band-pass filters for economic time series. Review of Economics and Statistics, 81(4), 575–593.
Beaudry, P., & Portier, F. (2004). An exploration into Pigou’s theory of cycles. Journal of Monetary Economics, 51(6), 1183–1216.
Beaudry, P., & Portier, F. (2006). Stock prices, news, and economic fluctuations. American Economic Review, 596(4), 1293–1307.
Blanchard, O. J., & Kahn, C. M. (1980). The solution of linear difference models under rational expectations. Econometrica, 48, 1305–1311.
Cass, D. (1965). Optimum growth in an aggregative model of capital accumulation. Review of Economic Studies, 32, 233–240.
Cogley, T., & Nasan, J. M. (1995). Output dynamics in real-business-cycle models. American Economic Review, 85, 492–511.
Cooley, T. F. (1995). Frontiers of business cycle research. Princeton: Princeton University Press.
Cooley, T. F., & Prescott, E. C. (1995). Economic growth and business cycles. In T. F. Cooley (Ed.), Frontiers of business cycle research (pp. 1–64). Princeton: Princeton University Press.
deJong, D. N., & Dave, C. (2011). Structual macroeconometrics (2nd ed.). Princeton: Princeton University Press.
Galí, J. (1999). Technology, employment, and the business cycle: Do technology shocks explain aggregate fluctuations?. American Economic Review, 89, 249–271.
Gandolfo, G. (2009). Economic dynamics. Berlin/Heidelberg: Springer.
Heer, B., & Maußner, A. (2009). Dynamic general equilibrium modeling: Computational methods and applications (2nd ed.). Heidelberg: Springer.
Heer, B., Maußner, A., & Süssmuth, B. (2018). Cyclical asset returns in the consumption and investment goods sector. Review of Economic Dynamics, 28, 51–70.
Heer, B., & Schubert, S. F. (2012). Unemployment and debt dynamics in a highly indebted small open economy. Journal of International Money and Finance, 31, 1392–1413.
Hodrick, R. J., & Prescott, E. C. (1997). Postwar US business cycles: An empirical investigation. Journal of Money, Credit, and Banking, 29, 1–16.
Jermann, U. J. (1998). Asset pricing in production economies. Journal of Monetary Economics, 41, 257–275.
Judd, K. L. (1998). Numerical methods in economics. Cambridge: MIT Press.
King, R. G., & Watson, M. W. (2002). System reduction and solution algorithms for singular difference systems under rational expectations. Computational Economics, 20, 57–86.
Koopmans, T. C. (1965). On the concept of optimal economic growth. In The econometric approach to development planning (pp. 225–287). Amsterdam: North-Holland.
Kydland, F. E., & Prescott, E. C. (1982). Time to build and agregate fluctuations. Econometrica, 50, 1345–1370.
Long, J. B., & Plosser, C. I. (1983). Real business cycles. Journal of Political Economy, 91, 39–69.
McCandless, G. (2008). The ABCs of RBCs. Cambridge: Harvard University Press.
McGrattan, E. R., & Prescott, E. C. (2014). A reassessment of real business cycle theory. American Economic Review, 104, 177–182.
Mehra, R., & Prescott, E. C. (1985). The equity premium: a puzzle. Journal of Monetary Economics, 15, 145–161.
Miranda, M. J., & Fackler, P. L. (2002). Applied computational economics and finance. Cambridge: MIT Press.
Muth, J. F. (1961). Rational expectations and the theory of price movements. Econometrica, 29, 315–335.
Prescott, E. C. (1986). Theory ahead of business-cycle measurement. Carnegie-Rochester Conference on Public Policy, 24, 11–44.
Ramsey, F. (1928). A mathematical theory of saving. Economic Journal, 38, 543–559.
Ravn, M. O., & Uhlig, H. (2001). On adjusting the HP-filter for the frequency of observations (CEPR Discussion Paper, 2858).
Author information
Authors and Affiliations
Appendices
Appendix 2.1: Intertemporal Elasticity of Substitution and Savings
1.1 Derivation of the Intertemporal Elasticity of Substitution
In this appendix, we derive an expression for the intertemporal elasticity of substitution (IES), 1∕σ, in a simplified two-period model and study how savings depend on σ. In addition, we analyze the effects of non-capital income in the second period when a change in the interest rate also entails an endowment effect. For this reason, assume that a household lives for 2 periods and maximizes utility
where β denotes the discount factor, and c t represents consumption in period t = 1, 2. The household receives the wage incomes y 1 and y 2 in periods 1 and 2, respectively, and thus, the intertemporal budget constraint is given by:
where r denotes the real rate of interest.
The first-order condition for household utility maximization follows from the derivation of the Lagrangian
with respect to c 1 and c 2:
The first-order conditions of the household can be summarized by the following Euler equation:
where the right-hand side of the equation is equal to the marginal rate of intertemporal substitution in consumption.
Taking logarithms of both sides and using the approximation \(\ln (1+r)\approx r\),Footnote 51 we derive:
For small values, logarithms are very close to percentage changes, and thus, we can interpret r as the real interest rate.
The IES is defined as the percentage change in consumption growth for a one-percentage-point increase in the real interest rate:
By substituting (2.54) into the definition of the elasticity above, we can see that the definition of the IES is equivalent to the elasticity of consumption growth with respect to marginal utility growth:
Let utility of consumption be given by
This utility function belongs to the family of the so-called ‘Constant-Relative-Risk-Aversion’ (CRRA) utility functions and has marginal utility u′(c) = c −σ. σ is equal to the elasticity of the marginal utility of consumption with respect to consumption and is also called the coefficient of relative risk aversion. Thus,
or
Hence, applying this result to expression (2.55), we obtain
Accordingly, the IES is equal to 1∕σ and, hence, equal to the reciprocal of the elasticity of the marginal utility of consumption with respect to consumption.
1.2 CES Utility and Savings
Let us consider another example of a utility function with a constant IES:
In contrast to (2.1), this function is not characterized by additive separability of the period’s instantaneous utility functions. It is easy to show that (2.56) is characterized by a constant IES equal to
As a numerical example, we assume that the household has non-capital incomes y 1 and y 2 in periods 1 and 2, respectively, and thus, the budget restriction is given by:
In the initial steady state, we consider the values y 1 = 100, y 2 = 0, and r = 5% with discount factor β = 1∕1.1. The values of first-period consumption c 1 and savings s are summarized in columns three and four and in the first and third entry rows of Table 2.2 for two different values of σ ∈{0.5, 1.5}.
How does an increase in r from 5% to 10% affect savings s = y 1 − c 1? Clearly, savings s decrease (increase) if the IES is below one, 1∕σ < 1 (above one, 1∕σ > 1).
If we also consider non-capital income in the second-period, e.g., y 2 = 90, there is an additional endowment effect. If r increases, the discounted value of the non-capital income, \(y_1 + \frac {y_2}{1+r}\), decreases, and consequently, this reduces consumption in both periods. If c 1 declines, savings s increase due to this effect. Due to this endowment effect, savings even increase in response to an interest rate rise for σ = 0.5 in the present example. The effect of increasing the interest rate from 5% to 10% with y 1 = 100 and y 2 = 90 is summarized in Table 2.3.Footnote 52
As a consequence of this finding, we often have a “normal” reaction of savings—i.e. a rise in savings s if the interest rate r increases—in large-scale OLG models in which households receive income in many periods, such as the Auerbach-Kotlikoff model that we will consider in Chap. 6. In these models, instability is less of a problem. The intuition is simple: If agents accumulate more savings and the capital stock increases, the interest rate will decrease and, eventually, will prevent households from accumulating additional savings.
Appendix 2.2: Solving Non-linear Equations Numerically
In many applications in this book, we need to find the solution x to a non-linear equation:
In this appendix, we will focus on presenting only the main idea of the solution method that we predominantly apply hereinafter. For a more comprehensive presentation of this problem for economists, see Chapter 5 in Judd (1998) or Chapter 3 in Miranda and Fackler (2002).
One of the most widely applied and successful methods to solve non-linear equation (2.57) is the Newton-Rhapson method also know as Newton’s method. The idea is illustrated in Fig. 2.14. The function f(x) has a so-called root at a point x = x ∗ that we attempt to locate. However, since the function is non-linear and is given in implicit form, we may not be able to directly solve for x but instead have to provide a guess x 0 and evaluate the function at this point, f(x 0), and attempt to get as close to the solution, x ∗, as possible.

Newton-Rhapson method
The idea of the Netwon-Rhapson method is to use an iterative scheme, where, starting with an initial guess x 0, we can compute x s+1 with the help of x s using successive linearization around x s. Starting at our initial guess x 0, the linear approximation of \(f:[a,b]\rightarrow \mathbb {R}\) at x 0 is given by:
where x is supposed to be the root that we are attempting to locate. Since g 0(x) = 0, we obtain:
This iteration step takes us to point x 1 in Fig. 2.14. Since we have not yet found the solution, we need to continue to iterate forward:
When should we stop the algorithm?
-
1.
We may stop if we are close to the solution, x ∗. Therefore, we stop if |f(x s)| < 𝜖, e.g., if |f(x)| < 10−5,
-
2.
or we may stop the algorithm if successive values of x s no longer change, e.g., if x s and x s+1 are close to one another:
$$\displaystyle \begin{aligned} \frac{|x_s-x_{s+1}|}{1+|x_s|} \le \epsilon, \;\;\epsilon \in \mathbb{R}_{++}. \end{aligned} $$(2.58)
Therefore, we examine the percentage change in x s. In the denominator, the number 1 is added to |x s| to ensure that we do not encounter the problem of numerical inaccuracies if x s is small in absolute value. To understand this problem, note that the computer has a given machine accuracy, e.g., it can only store and compute numbers with an accuracy of 1e-16. Let us assume that x s = 1.0e-15. In this case, we cannot determine the solution with an accuracy of 1% because the computer is not able to distinguish between 1.01e-16 and 1.0e-16. Therefore, (2.58) would not be applicable if we did not add the number one to the denominator.
The Newton-Rhapson algorithm is summarized in Algorithm 2.1.
Algorithm 2.1 (Newton-Raphson)

There are two major problems with the Newton-Rhapson method:
-
1.
x s+1 may not be defined. For example, in Fig. 2.14, x 1 lies outside the definition area of f(.), e.g., utility from negative consumption cannot be evaluated (if the computer has to evaluate \(\ln (x)\) for x ≤ 0, the computation breaks down). We need to choose a different value, \(x_1^{\prime }\), as the starting point in the second iteration.
-
2.
It may be impossible to derive f′(.).
To circumvent these problems, we modify the Newton-Rhapson algorithm as follows:
-
1.
We backtrack \(x_{s+1}^{\prime }\) along the direction of f′(x s) to a point x s+1 at which f can be evaluated. For example, we could simply take the midpoint between x s and x s+1. If this point \(x_{s+1}^{\prime }=(x_s+x_{s+1})/2\) is still not admissible, we take the midpoint between x s and \(x_{s+1}^{\prime }\). We continue in this fashion until we are able to evaluate f(.).
-
2.
Instead of f′(.), we use the slope of the secant rather than the derivative to compute the derivative. Therefore, the Newton-Rhapson step is changed to:
$$\displaystyle \begin{aligned} x_{s+2} = x_{s+1} - \frac{x_{s+1}-x_s}{f(x_{s+1})-f(x_s)} f(x_{s+1}).\end{aligned} $$(2.59)To compute the secant, we need two former iteration points, x s and x s+1, and, consequently, two initial points for this method. The secant method is illustrated in Fig. 2.15.
Fig. 2.15 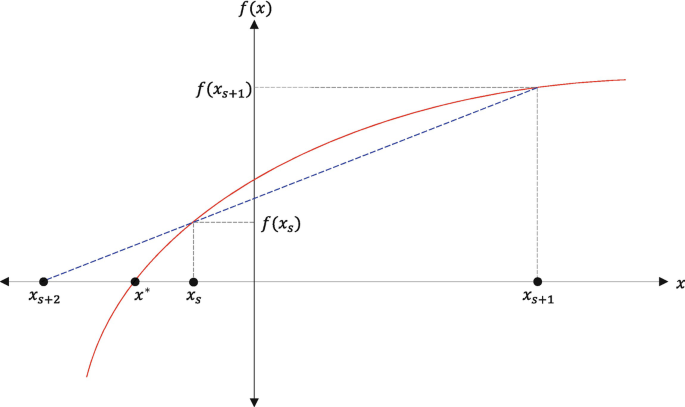
Secant method

The altered algorithm is called the Modified or Quasi-Newton Method. In the following, we will state the algorithm for the case in which we do not have to solve one single non-linear equation, f(x) = 0, but a system of system of n non-linear equations in the unknowns x = [x 1, x 2, …, x n]:
The equivalent to f′(x) in the multi-variable case is the Jacobian matrix J(x) of partial derivatives of f = [f 1, f 2, …, f n]′ with respect to x i, i = 1, 2, …n. We use the notation
The Jacobian is defined by:

Algorithm 2.2 (Modified Newton-Raphson)

This algorithm is implemented in the numerical Gauss routine FixVMN1(.) that we use in our programs.Footnote 53 In MATLAB, the command fsolve computes the solution to non-linear equations.
The most pressing remaining problem for the researcher who wants to apply the Newton-Rhapson algorithm and the routine FixVMN1(.) is to come up with a good initial guess that is close to the true solution. If the guess is not close enough, the sequence x s, s = 1, 2, …, might not converge. Possible methods to find a good initial guess are as follows:
-
1.
Grid search over an interval. Of course, in this case, we have to ensure that the algorithm may not have to evaluate the function at a point that results in a breakdown (e.g., 1∕0 or (−2.5)1∕2).
-
2.
Educated guess.
-
3.
Genetic search.
-
4.
Backstepping.
A diligent discussion of these problems is provided in Chapter 11.5 of Heer and Maußner (2009). We will also discuss this problem in the upcoming applications in this book if appropriate.
Appendix 2.3: Solving the Benchmark RBC Model
In this appendix, we compute the solution of the benchmark real business cycle (RBC) model described in Sect. 2.4. To solve it we use a linear approximation of the system of difference equations at the steady state. The algorithm is based upon the pioneering work of Blanchard and Kahn (1980) and follows the approach of King and Watson (2002).Footnote 54
Our model is described by the first-order condition of the household, (2.36), and the resource constraint (2.44). After substitution of the factor prices from (2.43) and the production function, \(y_t=Z_t k_t^\alpha L_t^{1-\alpha }\), the equilibrium can be presented by the following equations in k t, λ t, c t, and L t:
We have to distinguish four types of variables in the stochastic system of difference equations (2.62). First, we have the predetermined variables x t. In our case, the only predetermined variable in period t is the capital stock k t because investment i t−1 = k t − (1 − δ)k t−1 was already chosen at the end of period t − 1. The second set of variables are the so-called costate variables λ t. The number of these variables must be equal to the number of dynamic equations (those equations that contain variables from both periods t and t + 1) minus the number of predetermined variables. Therefore, we need one costate variable. In addition, the costate variables must be dynamic, i.e., these variables must appear in the system of equations with time index t + 1. In our case, the Lagrange multiplier λ t is the costate variable. The third type of variables are control variables u t, which are the remaining variables in the model that are either chosen by the household and/or the firm, e.g., labor supply, or that are determined by equilibrium conditions, e.g., the prices that equate demand and supply. In our case, the control variables are consumption c t and labor L t. Finally, the fourth type of variable is the exogenous state variable, which is the technology shock Z t.
To solve the system of equations (2.62), we linearize it around the deterministic steady state in a first step and solve the linearized system in a second step. Therefore, we first successively linearize each of the equations in (2.62) starting with (2.62a). We take the logarithm of (2.62a):
and compute the total differential of this equation in steady state with Z t = Z, k t = k, c t = c, and L t = L:
Using the notation \(\hat x_t \equiv dx_t/x\) for the percentage deviation of the variable x ∈{Z, k, c, L, λ}, we obtain:
Similarly, we log-linearize (2.62b):
Rearranging terms, we find
or, evaluated in steady state,
More generally, we can write (2.64) in the following form:

where we define the variables u t, x t, Λ t, and z tas follows:
Next we consider (2.62c), substitute r t = αZ t(L t∕k t)1−α and differentiate totally in steady state:
and, after dividing by λ:
Finally, the resource constraint of the economy is presented by (2.62d). Taking the total differential in steady state yields
Rearranging the last two log-linearized equations, we obtain
Computing the matrices of this system of equations by plugging in the parameter and equilibrium values of the model, we derive
More generally, this equation can be written as:

Collecting all dynamic equations characterizing our linearized stochastic system of difference equations, we derive (2.69):


In addition, we assume that Z t is governed by the AR(1)-process (2.45):
To reduce the system, we assume that the first equation can be solved for the vector u t:

In our case,
Shifting the time index one period into the future and taking expectations conditional on information as of period t yields:

The solutions (2.70) and (2.72) allow us to eliminate u t and \(\mathbb {E}_t{u}_{t+1}\) from (2.69b):

Assume that the matrix \(D_{x\lambda }-D_u C_u^{-1}C_{x\lambda }\) is invertible. Furthermore, (2.45) implies \(\mathbb {E}_t {z}_{t+1} = \rho ^Z {z}_t\). Consequently, we obtain the reduced dynamic system:

In our example,

Next, we proceed in the same way as in the derivation of our stability result in Sect. 2.2.2. In particular, we use the Schur factorization of W:
with
We can reformulate the equation in the transformed variables

Multiplying (2.74) by T −1, we obtain

We solve this difference equation line by line, starting with the last line. Accordingly,
Rearranging this equation, we obtain
where we have used the assumptions that (1) \(\mathbb {E}_t \hat Z_{t+i}=(\rho ^Z)^i \hat Z_t\) and (2) \(\lim _{i\to \infty } \tilde \lambda _{t+i}<\infty \). Noticing that \(\tilde \lambda _t = 0.5789 \hat k_t +0.8154 \hat \lambda _t\), we derive
Therefore, we have derived the policy function for the marginal utility of consumption, \(\hat \lambda _t\), given the values of the state variables \(\hat k_t\) and \(\hat Z_t\).
Next, we have to solve the first line of the difference equation
Substituting for \(\tilde k_t\) and \(\tilde \lambda _t\) from (2.75) and for \(\hat \lambda _t\) from (2.76), we find thatFootnote 55
With the help of the policy function for \(\hat \lambda _t\), we can also compute the policy function for \(\hat c_t\) and \(\hat L_t\) from (2.71):
Similarly, we can compute the policy function for output, wages, and the interest rate with the help of \(\hat L_t\) from
Appendix 2.4: Data Sources
Most data are taken from the FRED database of the Federal Reserve Bank of St. Louis at https://research.stlouisfed.org/fred2/, where you can download many US macroeconomic time series (Accessed on 28 October 2015). The time series that we use in this chapter are also attached as a separate ASCII file “Fred_Data.txt” to my Matlab/Gauss programs.
-
Output Gross Domestic Product. Bureau of Economic Analysis (BEA), retrieved from FRED, Federal Reserve Bank of St. Louis. Series ID: GDPA.
-
Consumption Real Personal Consumption Expenditures, Billions of Chained 2009 Dollars, Quarterly, Seasonally Adjusted Annual Rate. Series ID: PCECC96.
-
Investment Private Nonresidential Fixed Investment. BEA, retrieved from FRED, Federal Reserve Bank of St. Louis. Series ID: PNFIA.
-
Labor Supply Nonfarm Business Sector: Hours of All Persons. US. Bureau of Labor Statistics, retrieved from FRED, Federal Reserve Bank of St. Louis. Series ID: HOANBS.
-
Wages Nonfarm Business Sector—Compensation Per Hour. BLS, retrieved from FRED, Federal Reserve Bank of St. Louis. Series ID: COMPNFB.
-
Nominal Interest Rate for the Risk-free Rate 3-Month Treasury Bill: Secondary Market Rate, Percent, Quarterly, Not Seasonally Adjusted. Series ID: TB3MS.
-
Nominal Equity Return Standard & Poor’s 500 Total Return, Yield, Percent, Quarterly, Not Seasonally Adjusted, own calculation.
-
Inflation Rate Personal Consumption Expenditures: Chain-type Price Index Less Food and Energy, Index 2009 = 100, Quarterly, Seasonally Adjusted, retrieved from FRED, Federal Reserve Bank of St. Louis. Series ID: JCXFE.
Problems
2.1
Compute the dynamics for the centralized deterministic Ramsey model with labor supply as presented in Fig. 2.9 for the case of a CES production function (2.6). Use the value σ p = 3∕4 for the production substitution elasticity as in Heer and Schubert (2012). For all other parameters, use the values provided in Sect. 2.2.
2.2
Compute the Jacobian (2.16) at the steady state k t = k, x t = k.
2.3
Consider the market economy described in Sect. 2.3. Assume that the government has to finance exogenous expenditures G t that do not affect utility or production (in Chap. 4, we will modify this assumption). Consider two cases:
-
1.
Government expenditures are financed by a lump-sum tax T t such that each household pays T t∕N t.
-
2.
Government expenditures are financed by a tax on wage income such that the individual household pays τ t w t L t in taxes.
Is the allocation in the economy in both cases Pareto-optimal?
2.4
Consider the market economy described in Sect. 2.3. Assume that the initial capital stock per capita amounts to 50% of its steady state value.
-
1.
Compute the transition dynamics to the steady state. Assume that the transition is completed after 50 periods. How does the savings rate behave during the transition? Contrast your finding in the Ramsey model with the Solow model where the savings rate is constant.
-
2.
Introduce capital adjustment costs into the Ramsey model. For this reason, assume that the household faces the following costs to increase its capital stock:
$$\displaystyle \begin{aligned} k_{t+1} = (1-\delta) k_t + \varPhi \left( \frac{i_t}{k_t}\right),\end{aligned}$$where i t denotes investment and Φ(.) is a concave function that takes the following form:
$$\displaystyle \begin{aligned} \varPhi \left( \frac{i_t}{k_t}\right) = \frac{a_1}{1-\zeta} \left( \frac{i_t}{k_t}\right)^{1-\zeta} + a_2.\end{aligned}$$Calibrate the parameter of the adjustment cost function Φ(.) as follows: ζ = 1∕0.23 is taken from Jermann (1998). Assume that adjustment costs play no role in steady state, meaning that i = δk, and that the multiplier of the adjustment cost constraint in the Lagrangian,
$$\displaystyle \begin{aligned}\begin{aligned} \mathscr{L}&= \sum_{t=0}^\infty \beta^t \left\{ u(c_t,L_t) + \lambda_t \left[ w_t L_t + r_t k_t - c_t -i_t \right]\right.\\ &\left.+ q_t \left[ k_{t+1}-(1-\delta) k_t - \varPhi \left( \frac{i_t}{k_t}\right)\right]\right\} \end{aligned}\end{aligned}$$is equal to one in steady state, q = 1, implying
$$\displaystyle \begin{aligned} a_1 = \delta^\zeta,\end{aligned}$$and
$$\displaystyle \begin{aligned} a_2 = \frac{-\zeta}{1-\zeta} \delta.\end{aligned}$$How do capital adjustment costs affect the savings rate during the transition?
-
3.
Compute the impulse responses and the time series statistics for the RBC model with capital adjustment costs.
2.5
Two-Sector Model (follows Heer, Maußner, and Süssmuth 2018 ) Consider a two-sector economy in which a consumption and an investment good are produced in separate production sectors. The consumption goods sector (subscript C) employs the technology
where L Ct and K Ct denote labor and capital employed in this sector. Z Ct denotes the total factor productivity (TFP). We assume that the log of Z Ct follows a random walk with drift parameter a C and (possibly) autocorrelated innovations 𝜖 Ct:
The investment goods sector (subscript I) uses the production technology
so that I t is the amount of investment goods in period t which sell at the relative price p t. The process for total factor productivity in the investment sector is also difference stationary, yet with a different drift rate a I:
The economy’s output in units of the consumption good is equal to
Total labor and capital in the economy equal
The firms in the two sector maximize profits
A representative household supplies labor L Ct to the consumption goods sector and L It to the investment goods sector. The respective wage rates are w Ct and w It and are equal to each other in equilibrium. The household maximizes intertemporal utility
where its instantaneous utility function u depends on consumption C t and labor L t:
The household also owns the capital stock which is subject to adjustment costs:
where δ denotes the rate of capital depreciation and the adjustment cost functions Φ X, X ∈{C, I}, have the same functional forms as the one specified in Problem 2.4 above.
-
1.
Derive the equilibrium conditions of the model.
-
2.
Reformulate the equilibrium equations in stationary variables. Show that, in the long-run, the relative price of the two goods p t is driven by the different rates of technological progress.
-
3.
Compute the model and its impulse responses to a productivity shock in the two sectors. Use the calibration of Heer, Maußner, and Süssmuth (2018): β = 0.994, ν 1 = 0.3, α = 0.36, δ = 0.021, ζ C = 6.0, ζ I = 2.0, a C = 0.00054, a I = 0.0077, ρ C = 0, ρ I = 0.28, σ C = 0.0070, σ I = 0.0084, and the steady state value of labor L = 0.33 for the calibration of ν 0. How do the responses differ between the productivity shocks to the consumption and investment goods sectors?
2.6
For the two-period model in Appendix 2.1, show that the optimal consumption in period 1, c 1, is given by:
For y 2 = 0, it follows immediately that \(\frac {\partial c_1}{\partial r}>0\) if and only if 1∕σ > 1. Recompute the values in the Tables 2.2 and 2.3 in Appendix 2.1 with the help of Gauss (use the proc() command to compute the value of the function (2.78)) or MATLAB.
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Heer, B. (2019). Ramsey Model. In: Public Economics. Springer Texts in Business and Economics. Springer, Cham. https://doi.org/10.1007/978-3-030-00989-2_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-00989-2_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-00987-8
Online ISBN: 978-3-030-00989-2
eBook Packages: Economics and FinanceEconomics and Finance (R0)