
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


Author information
Authors and Affiliations
Problems
Problems
-
1.
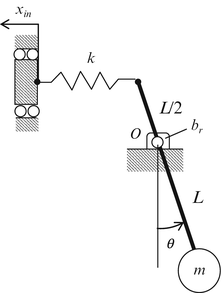
A positioning system is designed with a lever arrangement as shown in the figure. It is controlled by a displacement, x in , applied through a spring. There is rotational viscous damping, b r , in the pivot bearing at O.
Complete the following.
-
(a)
Determine the equation of motion for the system in terms of θ and linearize using the small angle approximation.
-
(b)
Find the system transfer function \( \frac{\Theta (s)}{X_{in}(s)} \).
-
(c)
Determine the expression for the reflected rotational stiffness of the spring, k, and the reflected inertia of the mass, m.
-
(d)
Determine expressions for the natural frequency, ω n , and damping ratio, ζ.
-
(e)
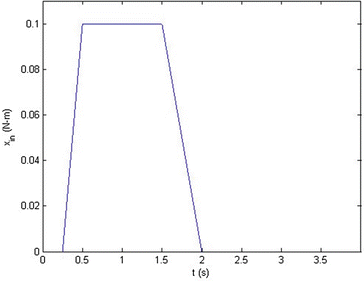
The values of L, m, k, and b r are 1.5 m, 2 kg, 500 N/m, and 10 N-m-s respectively. Calculate the natural frequency ω n and damping ratio ζ. Using a Matlab ® script file and the lsim command, simulate the response to the input provided and plot the response. The ramp up begins at 0.25 s and ends at 0.5 s. The ramp down begins at 1.5 s and ends at 2.0 s. The total time interval is 4.0 s.
-
(f)
Repeat your simulation for a rotational damping, b r , of 50 N-m-s. What is the new damping ratio? What is the effect on the response?
-
(a)
-
2.
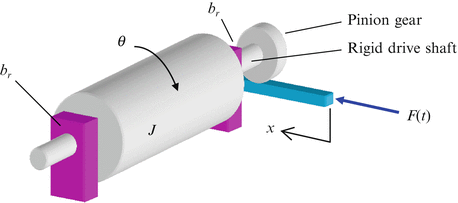
A rack and pinion drives system for a cylindrical drum in a chemical mixing system is depicted in the figure. The input is the force, F(t), which produces the motion, x, and rotates the pinion gear. There is viscous rotational damping, b r , in each of the two bearings and the rotating drum has an inertia, J. The radius of the pinion gear is R and the shaft connecting the pinion to the drum is rigid.
Complete the following.
-
(a)
Determine the equation of motion in terms of v and \( \dot{v} \), where \( v=\dot{x} \).
-
(b)
Determine expressions for the reflected inertia of the drum and the reflected damping of the bearings.
-
(c)
Determine the equation of motion in terms of ω and \( \dot{\omega} \), where \( \omega =\dot{\theta} \).
-
(d)
Find the transfer function \( \frac{\Omega (s)}{F(s)} \) and the time constant for the system.
-
(e)
The values of J, R, and b r are 2.5 kg-m2, 0.1 m, and 5 N-m-s, respectively. Using a Matlab ® script file and the step command, simulate and plot the response ω(t) to an input force F(t) = F 0 ⋅ u(t), where F 0 is 500 N for a time interval of four time constants. Apply the final value theorem and initial value theorem to the solution in the Laplace domain and compare the results to your plot.
-
(a)
-
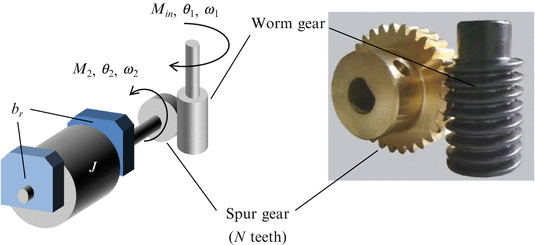
3.
Consider the positioning system shown in the figure; it describes a rotary inertia, J, driven by a worm gear with an input moment, M in (t). The worm gear drives a spur gear with N teeth so that \( {\theta}_2=\frac{\theta_1}{N} \). The total rotational damping of the bearings is b r and the shafts can be assumed to be rigid.
Complete the following.
-
(a)
Determine the equation of motion in terms of ω 1 and \( {\dot{\omega}}_1 \).
-
(b)
Determine and find expressions for the reflected inertia of J and the reflected damping of b r at the worm gear input.
-
(c)
Calculate the transfer functions \( \frac{\Omega_1(s)}{M_{in}(s)} \) and \( \frac{\Omega_2(s)}{M_{in}(s)} \) and determine an expression for the system time constant.
-
(d)
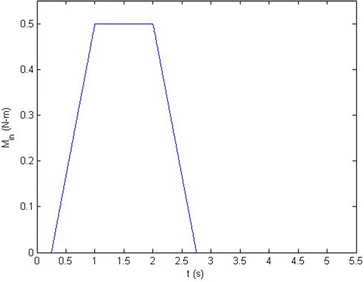
The values of J, N, and b r are 1.2 kg-m2, 100 teeth, and 5 N-m-s, respectively. Using a Matlab ® script file and the lsim command, simulate and plot the response ω 2(t) to the input moment provided. The initial ramp up begins at 0.25 s and ends at 1.0 s. The ramp down begins at 2.0 s and ends at 2.75 s. The total time interval is 5.5 s.
-
(a)
-
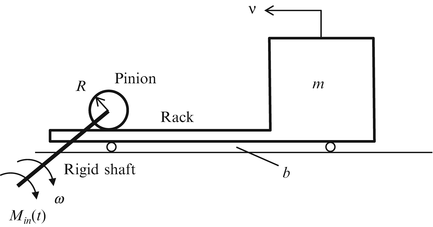
4.
A motor on high-speed gantry machine tool drives a large mass with a moment, M in (t), applied through a rack and pinion. The pinion radius is R and the mass is m. There is linear damping, b, acting against the motion of the mass from the oil slideways (linear bearings).
Complete the following.
-
(a)
Write the equations of motion in terms of, first, ω and M in (t) and then v and M in (t). Using the first equation, find an expression for the equivalent rotational inertia of the mass, m, as seen by the motor.
-
(b)
The values of the parameters m, b, and R are 2000 kg, 400 N-s/m, and 0.2 m, respectively. The input moment is a step M in (t) = M 0 ⋅ u(t), where M 0 is 10 N-m. Find the steady state velocity and time constant for the system.
-
(c)
Find the velocity v(t) by solving the equation of motion using Laplace transforms.
-
(d)
Use a Matlab ® script file to plot the system response, v(t), to the step input for a duration of four time constants.
-
(a)
-
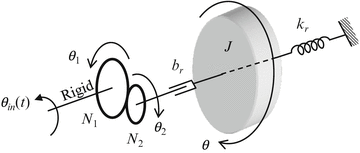
5.
A disk with inertia, J, is attached to ground through a flexible shaft with rotational stiffness, k r . It is driven through a fluid coupling with resistance (rotational damping), b r , that connects gear 2 with N 2 teeth to the inertia J. Gear 2 is driven by gear 1 with N 1 teeth. The input is a prescribed angular displacement, θ in (t), of gear 1 and the output is the angle θ(t) of the disk.
Complete the following.
-
(a)
Determine the equation of motion for the system in terms of θ and θ in (t).
-
(b)
The values of the parameters J and k r are 0.05 kg-m2 and 9000 N-m/rad, respectively. The gear ratio is 20:1 (N 1 = 200 and N 2 = 10). Calculate the natural frequency, ω n , and determine the value of b r such that the system is 40% damped.
-
(c)
Using a Matlab ® script file and the ilaplace command, find θ(t) in response to a ramp input θ in (t) = 2t rad and plot the response for eight time constants. Apply the initial value theorem and final value theorem to the solution in the Laplace domain. Why does θ(t) reach a nonzero steady state value?
-
(a)







Rights and permissions
Copyright information
© 2015 Springer Science+Business Media New York
About this chapter
Cite this chapter
Davies, M.A., Schmitz, T.L. (2015). Combined Rectilinear and Rotational Motions: Transmission Elements. In: System Dynamics for Mechanical Engineers. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-9293-1_6
Download citation
DOI: https://doi.org/10.1007/978-1-4614-9293-1_6
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-9292-4
Online ISBN: 978-1-4614-9293-1
eBook Packages: EngineeringEngineering (R0)