
The online version of the original chapters can be found under doi:10.1007/978-1-4471-5667-3.
You have full access to this open access chapter, Download chapter PDF
Keywords
- Multi-loop Feedback Systems
- Backward Expression
- Interval Polynomial
- Robust Stability Analysis
- Discrete Event Systems
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
The following ‘ ’ letters are errata that should be corrected (or inserted).
’ letters are errata that should be corrected (or inserted).
Chapter 1: Mathematical Descriptions and Models
-
1.
Page 5: Eq. (1.10),

-
2.
Page 6: Eq. (1.18),

-
3.
Fig. 1.5: Time sequence
 of the solution for Example 1.6
of the solution for Example 1.6 -
4.
Below Fig. 1.5: Note that the response is delayed by one step as shown in Fig. 1.5 if
 (i.e., y(k)=x
1(k−1)) is applied to the computer program for (1.55). This response corresponds to the result of Exercise (7).
(i.e., y(k)=x
1(k−1)) is applied to the computer program for (1.55). This response corresponds to the result of Exercise (7). -
5.
Page 7: Eq. (1.21),

-
6.
Page 13: Eq. (1.35),

-
7.
Page 13:
-
8.
Page 13: For simplicity, the initial conditions are assumed to be zero (i.e., y(0)=y(1)=⋯=y(n−1)=0 and also u(0)=u(1)=⋯=u(n−1)=0).
Comments: There would be no contradiction, because y(κ) and u(κ) in (1.35) defined for κ=k+n (κ≥n). However, in a computer simulation, backward expressions (1.19), (1.21), and (1.40) should be used.
-
9.
Page 13: Eq. (1.36),

-
10.
Page 14: Eq. (1.38), The
 is given as
is given as 
and

-
11.
Page 18:

-
12.
Page 18:
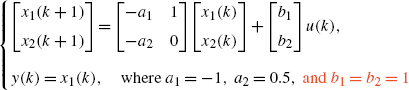
Tips: The z-transforms of the above equations are given as:
$$ \begin{bmatrix} z-1 & -1\\ 0.5 & z \end{bmatrix} \begin{bmatrix} \hat{x}_1(z)\\ \hat{x}_2(z) \end{bmatrix} = \begin{bmatrix} \hat{u}(z)\\ \hat{u}(z) \end{bmatrix} $$Then,
$$\begin{bmatrix} \hat{x}_1(z)\\ \hat{x}_2(z) \end{bmatrix} = \frac{1}{z^2-z+0.5} \begin{bmatrix} z & 1\\ 0.5 & z-1 \end{bmatrix} \begin{bmatrix} z/(z-1)\\ z/(z-1) \end{bmatrix}. $$Thus,
$$\hat{y}(z)=\hat{x}_1(z) =\frac{z^2+z}{(z^2)-z+0.5)(z-1)} =\frac{z^2+z}{z^3-2z^2+1.5z-0.5}. $$ -
13.
Page 19: The caption in Fig. 1.6, Fig. 1.6 Block diagram for Example 1.6, where a 1=1,
 , and b
1=b
2=1
, and b
1=b
2=1 -
14.
Page 23: Eq. (1.68),

-
15.
Page 24: In Table 1.2, The fourth line in ‘Discrete time’,

-
16.
Page 25: Eq. (1.76),

where
$$\boldsymbol{I}= \begin{bmatrix} 1 & 0\\ 0 & 1 \end{bmatrix} $$ -
17.
Page 26: Eqs. (1.78), (1.79), and (1.80), My first manuscript was written as follows:
$$\begin{cases} \boldsymbol{x}(k+1)=\boldsymbol{\Phi}(h)\boldsymbol{x}(k)+\boldsymbol{\Gamma}(h)u(k),\quad \boldsymbol{\Gamma}(h) =\int_0^h\boldsymbol{\Phi}(\tau)\boldsymbol{B}\mathrm{d}\tau\\ y(k)=\boldsymbol{Cx}(k). \end{cases} $$$$\begin{cases} z\hat{\boldsymbol{x}}(z)=\boldsymbol{\Phi}\hat{\boldsymbol{x}}(z) +\boldsymbol{\Gamma}\hat{u}(z)\\ \hat{y}(z)=\boldsymbol{C}\hat{\boldsymbol{x}}(z). \end{cases} $$$$\hat{y}(z)=\boldsymbol{C}[\boldsymbol{I}-\boldsymbol{\Phi}z^{-1}]^{-1}\boldsymbol{\Gamma}z^{-1}\hat{u}(z). $$These expressions might be preferable to (1.78), (1.79), and (1.80).


 of the solution for Example 1.6
of the solution for Example 1.6 (i.e., y(k)=x
1(k−1)) is applied to the computer program for (1.55). This response corresponds to the result of Exercise (7).
(i.e., y(k)=x
1(k−1)) is applied to the computer program for (1.55). This response corresponds to the result of Exercise (7).



 is given as
is given as 



 , and b
1=b
2=1
, and b
1=b
2=1



Frequency shifting and spectrum
Chapter 2: Discretized Feedback Systems
-
1.
Page 50: Eq. (2.7),

-
2.
Page 56: In Eq. (2.25),

-
3.
Page 69: Eq. (2.62),

-
4.
Page 71: In the last line ⋯and the
 problem is proved.
problem is proved.



 problem is proved.
problem is proved.Chapter 3: Robust Stability Analysis
-
1.
Page 75: Eq. (3.8),

-
2.
Page 94: Eq. (3.46) in Theorem 3.3,

-
3.
Page 94: The verification of robust stability using the above modified Hall diagram (off-axis
 -circles) is based on the following theorem.
-circles) is based on the following theorem.


 -circles) is based on the following theorem.
-circles) is based on the following theorem.Chapter 4: Model Reference Feedback and PID Control
-
1.
Page 114: In Eqs. (4.16), (4.17), (4.20), and (4.21),

-
2.
Page 117: In Eq. (4.22),

-
3.
Page 117: In the first line under Fig. 12, ⋯ , characteristic equation
 is given as
is given as -
4.
Page 132:

-
5.
Page 140: In Exercise (3), determine the characteristic equation
 , \(\mathcal{F}(z)=0\), for Example 4.1 (A) ⋯ .
, \(\mathcal{F}(z)=0\), for Example 4.1 (A) ⋯ . -
6.
Page 140: (4) Show that the approximate PID control system in Fig. 4.18 is obtained from the model-reference feedback system in Fig. 4.17, when \(\mathcal{D}_{m}(\cdot)\) and \(\mathcal{D}_{f}(\cdot)\), are
 .
.


 is given as
is given as
 ,
,  .
.Chapter 5: Multi-Loop Feedback Systems
-
1.
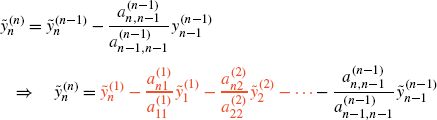
Page 153:

-
2.
Page 153: ⋯, where \(y_{j}^{(j)}\) ⇒ ⋯, where
 \(\tilde{y}_{j}^{(j)}\)
\(\tilde{y}_{j}^{(j)}\)

-
3.
Page 153: ⋯all principal minors of matrix \(\mathcal{A}\) ⇒ ⋯all principal minors of matrix

-
4.
Page 163:
-
5.
Page 163: ⋯, where \(y_{j}^{(j)}\) ⇒ ⋯, where
 \(\tilde{y}_{j}^{(j)}\)
\(\tilde{y}_{j}^{(j)}\)

-
6.
Page 163: ⋯all principal minors of matrix \(\mathcal{A}\) ⇒ ⋯all principal minors of matrix

-
7.
Page 177:










Chapter 6: Interval Polynomials and Robust Performance
-
1.
Page 186: Equation (6.17) should be written as follows:

-
2.
Page 191: Fig. 6.3 ⋯ for discrete control system ⇒ Fig. 6.3 ⋯ for discrete control

-
3.
Page 192:

The proof of Lemma 6.1 is given as follows:
$$\begin{aligned} & \qquad x^2+(y-\gamma)^2= \frac{[1-(1+\gamma^2)\theta^2]^2+[-\gamma+2\theta(1+\gamma^2) -\gamma(1+\gamma^2)\theta^2]^2}{ [1-2\gamma\theta+(1+\gamma^2)\theta^2]^2} \\ & {=}\,\frac{(1+\gamma^2)[1+(1+\gamma^2)\theta^4-2\theta^2 +4(1+\gamma^2)\theta^2+\gamma^2(1+\gamma^2)\theta^4 -4\gamma\theta-4\gamma(1+\gamma^2)\theta^3+2\gamma^2\theta^2]}{ [1-2\gamma\theta+(1+\gamma^2)\theta^2]^2} \\ & {=}\,\frac{(1+\gamma^2)[1+4\gamma^2\theta^2 +(1+\gamma^2)^2\theta^4 -4\gamma\theta-4\gamma(1+\gamma^2)\theta^3 +2(1+\gamma^2)\theta^2]}{ [1-2\gamma\theta+(1+\gamma^2)\theta^2]^2} =1+\gamma^2. \end{aligned}$$Thus, Lemma 6.1 has been proved. □
-
4.
Page 204:





Chapter 7: Relation to Discrete Event Systems
-
1.
Page 228: Fig. 7.6 Petri net systems ⇒ Fig. 7.6 Petri net systems

-
2.
Page 232: In (7.21),

-
3.
Page 234: Their notation is ⋯ ⇒

-
4.
Page 234:

and

-
5.
Page 235: In (7.28) and (7.33),

-
6.
Page 236:

-
7.
Page 237: ⋯ and three events. ⇒ ⋯ and
 events.
events. -
8.
Page 239:

-
9.
Page 239: The equations for continuous-time systems should be corrected as follows:

and
furthermore,








 events.
events.



Index
-
1.
Page 242: Four discrete-type equation ⇒
 equation
equation
 equation
equationAuthor information
Authors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag London
About this chapter
Cite this chapter
Okuyama, Y. (2014). Errata and Comments. In: Discrete Control Systems. Springer, London. https://doi.org/10.1007/978-1-4471-5667-3_8
Download citation
DOI: https://doi.org/10.1007/978-1-4471-5667-3_8
Publisher Name: Springer, London
Print ISBN: 978-1-4471-5666-6
Online ISBN: 978-1-4471-5667-3
eBook Packages: EngineeringEngineering (R0)