
Abstract
This paper describes a method for camera calibration. The system consists of a static camera which takes a sequence of images of a calibration plane rotating around a fixed axis. There is no requirement for any exact positioning of the camera or calibration plane.
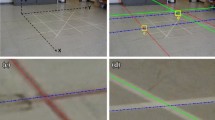
From each image of the sequence, the vanishing points and hence the vanishing line of the calibration plane are determined. As the calibration plane rotates, each vanishing point moves along a locus which is a conic section, and the vanishing line generates an envelope which is also a conic section. We describe how such conics can be used to determine the camera's focal length, the principal point (the intersection of the optic axis with the image plane), and the aspect ratio.
This work was supported by SERC Grant No GR/G30003. PB is in receipt of a SERC studentship. AZ is supported by SERC.
Thanks to Professor Mike Brady for advice, and to Professor Ken-ichi Kanatani for discussions on projective geometry. Thanks to Phil McLauchlan, Charlie Rothwell and Bill Triggs for invaluable help.
Chapter PDF
Similar content being viewed by others


References
P.A. Beardsley et al. The correction of radial distortion in images. Technical report 1896/91. Department of Engineering Science, University of Oxford.
F.L. Bookstein Fitting conic sections to scattered data. Computer Graphics and Image Processing, pages 56–91, 1979.
B. Caprile and V. Torre Using vanishing points for camera calibration. International Journal of Computer Vision, pages 127–140, 1990.
O.D. Faugeras and G. Toscani The calibration problem for stereo. In Proc. of IEEE Conf Computer Vision and Pattern Recognition, Miami, 1987.
S. Ganapathy. Decomposition of transformation matrices for robot vision. In Proc. of IEEE Conference on Robotics, pages 130–139, 1984.
K. Kanatani. Geometric Computation for Machine Vision. Oxford University Press, Due for publication 1992/3.
R.K. Lenz and R.Y. Tsai. Techniques for calibration of the scale factor and image center for high accuracy 3-D machine vision metrology. In IEEE Transactions Pattern Analysis and Machine Intelligence, pages 713–720, 1988.
Manual of Photogrammetry. American Society of Photogrammetry, 1980.
P. Puget and T. Skordas An optimal solution for mobile camera calibration. In Proc. First European Conf Computer Vision, pages 187–188, 1990.
J.G. Semple and G.T. Kneebone. Algebraic Projective Geometry. Oxford University Press, 1952.
R.Y. Tsai. An efficient and accurate camera calibration technique for 3D machine vision. In Proc. of IEEE Conf Computer Vision, pages 364–374, 1986.
Author information
Authors and Affiliations
Editor information
Rights and permissions
Copyright information
© 1992 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Beardsley, P., Murray, D., Zisserman, A. (1992). Camera calibration using multiple images. In: Sandini, G. (eds) Computer Vision — ECCV'92. ECCV 1992. Lecture Notes in Computer Science, vol 588. Springer, Berlin, Heidelberg. https://doi.org/10.1007/3-540-55426-2_36
Download citation
DOI: https://doi.org/10.1007/3-540-55426-2_36
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-55426-4
Online ISBN: 978-3-540-47069-4
eBook Packages: Springer Book Archive