
Abstract
A fuzzy logic controller with the fuzzy knowledge base: scaling factors of the input/output variables, membership functions and the rules are optimized by the use of the genetic algorithms, is presented in this work, and its application in the highly nonlinear systems. The fuzzy structure is specified by a combination of the mixed Sugeno ’s and Mamdani’s fuzzy reasoning. The mixed, binary-integer, coding is utilized to construct the chromosomes, which define the set of necessary prevailing parameters for the conception of the desired controller. This new controller stands out by a non standard gain (output scaling factor) which varies linearly with the fuzzy inputs. Under certain conditions, it becomes similar to the conventional PID controller with non-linearly variable coefficients. The results of simulation show, well, the efficiency of the proposed controller.
Chapter PDF
Similar content being viewed by others

References
L. A. Zadeh, “Fuzzy sets”, Information and Control, Vol. 8, 1965, pp. 338–353.
David E. Goldberg, ’Algorithmes génétiques: exploration, optimisation et apprentissage automatique’, Addison-Wesley, 1994.
Mamdani, E. H., “Application of fuzzy algorithms for simple dynamic plant”, Proc. IEE, D-121, 1974, pp. 1558–1588.
Mamdani, E. H., and Assilian, “An experiment in linguistic synthesis with a fuzzy logic controller”, International Journal of Man-Machine Studies, Vol. 7, 1975, pp.1–13.
M. Sugeno and G. T. Kang, “Structure identification of fuzzy model”, Fuzzy sets and systems, Vol. 28, 1988, pp.15–33.
Jhy-Shing Roger Jang and Chuen-Tsai Sun, “Neuro fuzzy modeling and control”, Proceedings of the IEEE, Vol. 83, No. 3, March 1995, pp. 378–406.
X. W. Yan, Z. D. Deng and Z. Q. Sun, “Genetic Takagi-Sugeno-fuzzy reinforcement learning”, Proceeding of the 2001 IEEE, International Symposium On Intelligent Control, September 5–7, 2001, Mexico city, Mexico, pp. 67–72.
Chia-Feng Juang and Yuan-Chang Liou, “A TSK-type recurrent fuzzy network for dynamic systems processing via supervised and reinforcement learning”, 2001 IEEE International Fuzzy Systems Conference, pp. 240–243.
Hao Ying, “Constructing nonlinear variable gain controllers via the Takagi-Sugeno fuzzy control”, IEEE Transactions On Fuzzy Systems, Vol. 6, No. 2, May 1998, pp. 226–234.
A. Homaifar and Ed McCormick, “Simultaneous design of membership functions and rules sets for fuzzy controllers using genetic algorithms”, IEEE Transactions On Fuzzy Systems, Vol. 3, No. 2, May 1995, pp. 161–176.
Jinwoo Kim, Yoonkeon Moon, and Bernard P Zeigler, “Designing fuzzy net controllers using genetic algorithms”, IEEE control systems, June 1995, pp. 66–72.
Jinwoo Kim, and Bernard P. Zeigler, “Designing fuzzy logic controllers using a multiresolutional search paradigm”, IEEE Transactions On Fuzzy Systems, Vol. 4, No. 3, August 1996, pp. 213–226.
Sanjay Kumar Sharma and George W. Irwin, “Fuzzy Coding of Genetic Algorithms”, IEEE Transactions on Evolutionary Computation, Vol. 7, No. 4, August 2003, pp 344–355.
Liu Diantong, YI Jianqiang, TAN Min, “Proposal of GA-based two-stage fuzzycontrol of overhead crane”, Proceeding of IEEE TENCON’02, 2002, pp. 1721–1724.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2004 Springer Science + Business Media, Inc.
About this chapter
Cite this chapter
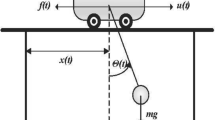
Soukkou, A., Khellaf, A., Leulmi, S. (2004). Control of Overhead Crane by Fuzzy-Pid with Genetic Optimisation. In: Bramer, M., Devedzic, V. (eds) Artificial Intelligence Applications and Innovations. AIAI 2004. IFIP International Federation for Information Processing, vol 154. Springer, Boston, MA. https://doi.org/10.1007/1-4020-8151-0_7
Download citation
DOI: https://doi.org/10.1007/1-4020-8151-0_7
Publisher Name: Springer, Boston, MA
Print ISBN: 978-1-4020-8150-7
Online ISBN: 978-1-4020-8151-4
eBook Packages: Springer Book Archive