
Abstract
A semi-trailer is a vehicle without a power unit, whose purpose is to carry goods and materials; semi-trailers differ one from another based on the type and weight of the transported goods. In this work, we analyzed the motion dynamics of a generic articulated vehicle and developed a rigid multibody model. First, we analyzed mathematical models from literature to understand the vehicle’s dynamic; secondly, we created a 3D model, based on theoretical background and typical constructive solutions; finally, we launched multibody simulations in a multi-domain environment SimScape. The results were used to evaluate the obtainable electric energy harvesting part of semi-trailer wheels’ rotational kinetic energy; finally, the electric power would be stored into a battery. Having an energy recovery system mounted directly on the semi-trailer would result in great benefits both for the costs and for the environmental impact: since every utility needs the engine to be always active, with an electric source we could power every utility of the semi-trailer without using the engine so that we could avoid the unnecessarily introduction of pollutants into the atmosphere.
Similar content being viewed by others


Keywords
1 Introduction
A semi-trailer is an unpowered vehicle, typically trained by a powerful vehicle for transporting goods and materials [1]. In contrast to the classic trailer, the semi-trailer is partially supported by the motor unit, so that it can carry heavier loads [2]. As mentioned before, the semi-trailer does not have any power unit [3], which means that every movement or electric consumption must be supplied by the engine of the power vehicle [4]. It can be interesting to have an electric generator installed on the semi-trailer so that fuel is not consumed unnecessarily [5]; the electric generator will convert some kinetic rotational energy of the wheels into electric energy, so we need to understand the impact of having another resistant torque in overall vehicle’s dynamics [6].
In the case of heavy vehicles, pneumatic suspension springs are used instead of conventional steel springs. An electric air pump or a motor compressor pumps the air into flexible bellows, usually in reinforced rubber. Air pressure inflates the bellows and lifts the frame off the pin [7]. Due to the heavyweights, many possible solutions are available based on the kind of load [8]. The most used solution is the hydro-elastic axle suspension [9], which we have considered when studying the problem: this type of suspensions allows us to carry heavy loads, ensuring good stability [10, 11]. The stability of the vehicle is affected by many factors, such as the road profile or due to dynamical instabilities [12, 13]. When articulated vehicles are modelled, they are usually treated as a system of single bodies connected in various ways [14]. The natural way of dealing with such complex systems is to divide the vehicle into several rigid and flexible elements [15, 16].
Furthermore, the dynamic behavior of an articulated vehicle is also complex [17, 18]. Some significant problems need to be solved or simplified to study this mechanical problem [19, 20]. Such issues are:
-
Many degrees of freedom
-
Big distributions of mass
-
The presence of two vehicles connected with a pin
Dynamic analysis can be carried out using mathematical models, among which the quarter car model [21] and half car model [22, 23] are the best known in the literature. These models are mainly used to study the motion of the suspended mass due to various road profiles: having well-calibrated suspension parameters allows us to absorb most of the vibrations coming from the road profile’s variations, and it avoids amplification [24, 25]. Another type of analysis can be done following a multibody approach [26]: the dynamics of the entire vehicle are easier to study using multibody models [27], and the vibrational analysis can be done using a multibody model as well [28, 29].
2 Literature Review
In literature, it is possible to find many mathematical models, more or less complex, to describe the dynamics of a generic vehicle [30]. The half-car model is useful to describe the pitch-and-bounce dynamic of the vehicle.
The mathematical model is useful to analyze vibrations of the system because a relation between longitudinal velocity and road profile (the real cause of vibrations) can always be found.
As mentioned before, a multibody model was preferred to simulate the dynamic behavior of the articulated vehicle [31]. The multibody approach foresees to describe the dynamic of the single body with the system of equations written in the following form:
The multibody approach allows managing much more DOF than any other mathematical model thanks to its structure [32]. The kinematic constraints and joints, limit the possible DOFs the multibody system can have, so it is possible to study more complex systems (compared to mathematical models) without significant simplifications [33]. Also, a multibody model is easier to implement and to manage in the calculator; there is a lot of software that simulates the dynamic behavior of the vehicles using a multibody approach [34, 35].
3 Research Methodology
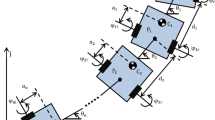
The half-car model is typically referred to a single vehicle (Fig. 1a), but it can be easily extended like reported in Fig. 1b, while in Fig. 2, a possible decomposition of a truck is shown: it is easy to see that, based on the decomposition, the final model of the mechanical system will be more or less complex. The software used in this work named SimScape allows performing multibody analysis of any mechanical system [36]. It requires a 3D model that can be created using any 3D modeling software, so we created a 3D model of a truck using SolidWorks [37, 38].

Half car model scheme: classic scheme (a); half car applied to the semitrailer-truck system (b).

A multibody decomposition of an articulated vehicle.
Considering that the focus of this work is the semi-trailer, the 3D model of the motor unit is downloaded on the net, while the semi-trailer is fully designed by the authors [39, 40]. The model is simplified, but every mechanical system needed for motion is included [41, 42]. SimScape outputs a Simulink scheme that can be used to perform simulations [43]. The final Simulink scheme is shown in Fig. 3. The solver used for the simulation is the ode45, based on an explicit Runge-Kutta (4,5) formula. In this scheme, the bodies and the kinematic constraints defined in the 3D model are present and fully editable, so that every mechanical behavior can be modelled and added to the simulation. In Simulink, the following was developed:

SimScape multi-domain environment.
-
A contact model between tires and road
-
The behavior for the semitrailer’s suspensions
-
An electric machine model for energy recovery
The interaction between a single tire and the road is decomposed in three fundamental components: a normal reaction based on the sinking of the wheel [44]; a longitudinal reaction based on the contact point’s longitudinal velocity between the road and the tire; a lateral reaction introduced only to prevent every unwanted lateral motion.
The normal reaction is shown in Eq. (3) and respects the reference systems shown in Fig. 4.

Wheel schematization.
The longitudinal reaction is modeled as a friction force [45] as shown in (4), depending on the contact point’s velocity between the road and the wheel.
This lateral reaction is introduced only to avoid every unwanted motion since that in the simulations the vehicle will follow a straight path [46]. The Eq. (5) shows the mathematical model of such force.
The semi-trailer’s suspensions consist of a spring element, typically a pneumatic element [49], and a damper element, typically an oil damper [50]. To simplify, the suspensions are modelled with a torsional spring and a translational damper with their proportionality constants. This displacement is shown in Fig. 5.

Scheme of the suspension system.
The mathematical models of these two reactions are shown in Eqs. (6), (7).
To evaluate the obtainable electric energy, we added a simple DC machine model to every tire. This model needs the rotational velocity of the rotor ω (in this case, the rotational velocity of the wheel) as input and outputs electromechanical resistant torque and generated current. The machine is connected to an electric load and a battery model to store the electric energy. The DC machine follows the electromechanical Eq. (8), with ω angular velocity of the wheels.
In Table 1, the parameters used for the numerical activity are shown: these values were taken from the manuals of manufacturers of suspension for heavy trucks. The overall mass of the semitrailer complete with its load was supposed to be 30 tons, as found in the relevant regulations.
We structured the model in main object blocks in which the necessary physics data is measured, while in the behavior blocks, we modeled the dynamics of the problem with the physics data collected before. The road profile was supposed to be flat for simplicity. This work aimed to test the effectiveness of an energy recovery device to be mounted on semi-trailers from an energy point of view. For this reason, we presumed to mount the current generator directly on the wheel axle.
4 Results
The purpose of the simulations was to test the effect of the additional resistant torque on the dynamics of the truck, due to the presence of the generator. Furthermore, we wanted to evaluate the amount of energy harvested during the motion. The following figures show the behavior of the vehicle at various supposed speeds and the corresponding energy accumulated by the device. For all simulations, we decided to activate the device once the cruising speed was reached.
The first simulation is shown in Fig. 6. The impact of the devices barely affects the velocity of the vehicle, but the generated electric power is not so high.

Vehicle’s speed profile (left); electric power generated (right) – 50 km/h target.
In Fig. 7, it can be seen how the deceleration increases with velocity. The electric power generated starts to be interesting and seems to have an approximately constant trend.

Vehicle’s speed profile (left); electric power generated (right) – 60 km/h target.
In Fig. 8, the deceleration of the vehicle starts to be significant, together with electric power that increases with velocity.

Vehicle’s speed profile (left); electric power generated (right) – 70 km/h target.
The final simulation reported, shown in Fig. 9 since most semi-trailers have a speed limit of 80 km/h. The electric power is enough to power many utilities on the semi-trailer, while the deceleration is now consistent: this means that the energy recovery phase can be used as regenerative braking without using regular brakes.

Vehicle’s speed profile (left); electric power generated (right) – 80 km/h target.
5 Conclusions
In this paper, the authors wanted to evaluate the feasibility of using a generator to harvest energy during the motion of a heavy vehicle. The idea is to generate electricity to power the on-board services, especially in the various stops to which the vehicles are bound by law, avoiding having to turn on the heat engine. This problem is particularly notable for refrigerated trailers, which are obliged to maintain a certain temperature for the proper conservation of the load. For this reason, a multibody model of a semi-trailer has been created, paying particular attention to the suspension system of the towed vehicle. The aim is to evaluate the forces between the wheels and the road surface, evaluating, therefore, the losses due to the presence of the generator. The simulation was conducted with the Simulink software in the Simscape multi-domain environment. For this first study, a simple DC motor was used to test the effectiveness of such an idea. The results for various speed targets reached to evaluate the electric energy at various operating conditions were reported and made it possible to conclude that:
-
An electrical machine on every wheel does not affect the vehicle’s overall stability;
-
At low speed, the resistant electromechanical torques of the devices are neglectable;
-
The electric power at high vehicle’s speed is considerable.
In conclusion, we can affirm that the use of such a device onboard can have a positive influence on the reduction of fuel consumption by reducing emissions and transport costs.
References
Naviglio, D., Formato, A., Scaglione, G., Montesano, D., Pellegrino, A., Villecco, F., Gallo, M.: Study of the grape cryo-maceration proceedings at difference temperatures. Foods 7(107) (2018)
Gao, L., Ma, F., Jin, C.: A model-based method for estimating the attitude of underground articulated vehicles. Sensors 19(23), 5245 (2019)
Rivera, Z.B., De Simone, M.C., Guida, D.: Unmanned ground vehicle modelling in Gazebo/ROS-based environments. Machines 7(2), 42 (2019)
Pappalardo, C.M., Wang, T., Shabana, A.A.: On the formulation of the planar ANCF triangular finite elements. Nonlinear Dyn. 89, 1019–1045 (2017)
De Simone, M.C., Rivera, Z.B., Guida, D.: Obstacle avoidance system for unmanned ground vehicles by using ultrasonic sensors. Machines 6, 18 (2018)
Bai, G., Meng, Y., Liu, L., Luo, W., Gu, Q., Li, K.: A new path tracking method based on multilayer model predictive control. Appl. Sci. 9(13), 2649 (2019)
De Simone, M.C., Guida, D.: Identification and control of a unmanned ground vehicle by using arduino. UPB Sci. Bull. Ser. D 80, 141–154 (2018)
De Ruiter, A.: Optimal design of a hydro-elastic rear axle suspension for heavy trucks. Technische Unversiteit Eindhoven (1997)
Pappalardo, C.M., Yu, Z., Zhang, X., Shabana, A.A.: Rational ANCF thin plate finite element. J. Comput. Nonlinear Dyn. 11, 051009 (2016)
Sena, P., Attianese, P., Carbone, F., Pellegrino, A., Pinto, A., Villecco, F.: A fuzzy model to interpret data of drive performances from patients with sleep deprivation. Comput. Math. Methods Med. 868410 (2012)
De Simone, M.C., Guida, D.: Control design for an under-actuated UAV model. FME Trans. 46, 443–452 (2018)
Concilio, A., De Simone, M.C., Rivera, Z.B., Guida, D.: A new semi-active suspension system for racing vehicles. FME Trans. 45, 578–584 (2017)
Sena, P., D’Amore, M., Pappalardo, M., Pellegrino, A., Fiorentino, A., Villecco, F.: Studying the influence of cognitive load on driver’s performances by a fuzzy analysis of lane keeping in a drive simulation. IFAC Proc. 2013(46), 151–156 (2013)
Gögen, E., Emre Özcan, K.: The effect of dolly suspension parameters to the european modular system vehicle combination. Eur. Mech. Sci. 2(4), 128–132 (2018)
Stoerkle, J.: Lateral dynamics of multiaxle vehicles. Diss. Master thesis, Institute for Dynamic Systems and Control, Swiss Federal Institute of Technology, Zürich, Switzerland 14(2) (2013)
Pappalardo, C.M.: A natural absolute coordinate formulation for the kinematic and dynamic analysis of rigid multibody systems. Nonlinear Dyn. 81, 1841–1869 (2015)
Sena, P., Attianese, P., Pappalardo, M., Villecco, F.: FIDELITY: fuzzy inferential diagnostic engine for on-line support to physicians. In: International Conference on the Development of Biomedical Engineering in Vietnam, pp. 396–400 (2012)
Spivey, C.: Analysis of ride quality of tractor semi-trailers. Clemson University All Theses, vol. 123 (2007)
Stoner, W. J.: Dynamic Simulation Methods for Evaluating Vehicle Configuration and Roadway Design, University of Iowa (1991)
Adamiec-Wójcik, I., Warmas, K.: Modelling articulated vehicles with a flexible semi-trailer. Arch. Mech. Eng. 80(3), 389–407 (2013)
Nordberg, A.: Simulation of a complete truck and trailer assembly: multi body dynamics. Luleå tekniska universitet Institutionen för teknikvetenskap och matematik (2018)
Kushairi, S., Schmidt, R., Rahman Omar, A., Azlan Mat Isa, A., Hudha, K.: Tractor-trailer modelling and validation. Int. J. Heavy Veh. Syst. 21(1), 64–82 (2014)
Salaani, M.K., Heydinger, G.J., Grygier, P.A.: Heavy tractor-trailer vehicle dynamics modeling for the national advanced driving simulator. SAE Technical Papers (2003)
Cheng, C., Evangelou, S.A.: Series active variable geometry suspension robust control based on full-vehicle dynamics. J. Dyn. Syst. Measur. Control Trans. ASME 141(5), 051002 (2019)
Sastry, D.V.A.R., Ramana, K.V., Rao, N.M., Pruthvi, P., Santhosh, D.U.V.: Analysis of MR damper for quarter and half car suspension systems of a roadway vehicle. Int. J. Veh. Struct. Syst. 9(1), 17–22 (2017)
Colucci, F., De Simone, M.C., Guida, D.: TLD design and development for vibration mitigation in structures. Lect. Not. Networks Syst. 76, 59–72 (2020)
Pappalardo, C.M., Guida, D.: Development of a new inertial-based vibration absorber for the active vibration control of flexible structures. Eng. Lett. 26(3), 372–385 (2018)
Liu, Q., Zhang, N., Feng, F.: Handling performance of tractor-semitrailers equipped with hydraulically interconnected suspension. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 233(12), 3098–3111 (2019)
Pappalardo, C.M., Wallin, M., Shabana, A.A.: A new ANCF/CRBF fully parameterized plate finite element. J. Comput. Nonlinear Dyn. 12, 031008 (2017)
Li, H.: Vibration and handling stability analysis of articulated vehicle with hydraulically interconnected suspension. J. Vib. Control 25(13), 1899–1913 (2019)
Guida, R., De Simone, M.C., Dašić, P., Guida, D.: Modeling techniques for kinematic analysis of a six-axis robotic arm. In: IOP Conference Series: Materials Science and Engineering, vol. 568, no. 1, p. 012115 (2019)
Pappalardo, C.M., Zhang, Z., Shabana, A.A.: Use of independent volume parameters in the development of new large displacement ANCF triangular plate/shell elements. Nonlinear Dyn. 91, 2171–2202 (2018)
Shastry, P., El-Gindy, M., Nguyen, N.: Pickup truck and trailer gross vehicle weight study, SAE Technical Papers (2019)
de Saxe, C., Cebon, D.: Estimation of trailer off-tracking using visual odometry. Veh. Syst. Dyn. 57(5), 752–776 (2019)
Genta, G.: Meccanica dell’autoveicolo. Levrotto & Bella (2000)
Pappalardo, C.M., Guida, D.: A time-domain system identification numerical procedure for obtaining linear dynamical models of multibody mechanical systems. Arch. Appl. Mech. 88(8), 1325–1347 (2018)
Villecco, F.: On the evaluation of errors in the virtual design of mechanical systems. Machines 6, 36 (2018)
Formato, A., Ianniello, D., Romano, R., Pellegrino, A., Villecco, F.: Design and development of a new press for grape marc. Machines 7, 51 (2019)
De Simone, M.C., Rivera, Z.B., Guida, D.: Finite element analysis on squeal-noise in railway applications. FME Trans. 46, 93–100 (2018)
Lucet, E., Micaelli, A.: Stabilization of a road-train of articulated vehicles. Rob. Auton. Syst. 114, 106–123 (2019)
Zhang, Y., Li, Z., Gao, J., Hong, J., Villecco, F., Li, Y.: A method for designing assembly tolerance networks of mechanical assemblies. Math. Probl. Eng. 2012, 513958 (2012)
Villecco, F., Pellegrino, A.: Evaluation of uncertainties in the design process of complex mechanical systems. Entropy 19, 475 (2017)
Quatrano, A., De Simone, M.C., Rivera, Z.B., Guida, D.: Development and implementation of a control system for a retrofitted CNC machine by using Arduino. FME Trans. 45, 565–571 (2017)
Patel, M.D., Pappalardo, C.M., Wang, G., Shabana, A.A.: Integration of geometry and small and large deformation analysis for vehicle modelling: chassis, and airless and pneumatic tyre flexibility. Int. J. Veh. Perform. 5, 90–127 (2019)
Formato, G., Romano, R., Formato, A., Sorvari, J., Koiranen, T., Pellegrino, A., Villecco, F.: Fluid–Structure Interaction Modeling Applied to Peristaltic Pump Flow Simulations. Machines 7(50) (2019)
De Simone, M.C., Guida, D.: Modal coupling in presence of dry friction. Machines 6(8) (2018)
Kulkarni, S., Pappalardo, C.M., Shabana, A.A.: Pantograph/catenary contact formulations. J. Vib. Acoust. 139, 011010 (2017)
Sun, Q., Sun, J., Jin, Z., Sun, S.: Mode selection of tractor-and-semitrailer swap transport for ro-ro shipping under land-sea combined transportation. Maritime Policy Manag. 46(8), 995–1010 (2019)
Pappalardo, C.M., Patel, M., Tinsley, B., Shabana, A.A.: Pantograph/catenary contact force control. In: ASME 2015 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers Digital Collection, Boston, Massachusetts, USA, 2–5 August 2015, pp. 1–11 (2015)
Formato, A., Ianniello, D., Pellegrino, A., Villecco, F.: Vibration-based experimental identification of the elastic moduli using plate specimens of the olive tree. Machines 7(46) (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Sicilia, M., De Simone, M.C. (2020). Development of an Energy Recovery Device Based on the Dynamics of a Semi-trailer. In: Ivanov, V., Pavlenko, I., Liaposhchenko, O., Machado, J., Edl, M. (eds) Advances in Design, Simulation and Manufacturing III. DSMIE 2020. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-50491-5_8
Download citation
DOI: https://doi.org/10.1007/978-3-030-50491-5_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-50490-8
Online ISBN: 978-3-030-50491-5
eBook Packages: EngineeringEngineering (R0)