
Abstract
The main focus of this work is simulation-driven product development methodology for MSc students’ education. The educational process is built around real product development process; small Unmanned Aerial Vehicle is used as a case-study. The bunch of simulation and optimization tools (NX CAD, Simcenter 3D, LMS System Synthesis, LMS Amesim, ANSYS, STAR-CCM) is used in the educational process for creating so-called “digital twin” of a real product and to achieve the continuity and transparency of the development process. Product Lifecycle Management (PLM) system is used to manage requirements, changes and integrate all simulation results. The global trend in engineering education is in the transition from the training of narrowly specialized engineers for high-tech industries. In the new reality, the industry needs specialists with broad knowledge and system thinking, which are able to solve problems that require cross-disciplinary expertise. These specialists should be able to use the most advanced methods and tools of numerical simulation, optimization, product lifecycle management, configuration management, advanced manufacturing techniques. The aim is to enhance the classical methodology for systems engineering with a digital environment in order to develop an MSc level courses teaching latest practices for innovative product design based on real case problems. A modeling of the system to be developed enables the comprehensive analysis and its quantitative assessment. Such approach demonstrates both a thorough investigation of a problem and quantitative estimation of the system’s efficiency.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Motivation
1.1 The Problems of Traditional Engineering Education
Classic engineering education approach implies courses devoted to some particular discipline. Usually, the course consists of the theoretical part, practical and/or laboratory parts. Theoretical part includes different means of physical processes mathematical description and some empirical experience, while seminars/labs aim to provide students with practical skills during test examples solution. In most cases, test examples are easy, easily verifiable and more or less abstract. This approach results in graduates with deep and narrow knowledge in particular field of engineering science. Traditional engineering education gives graduate all required knowledge for developing some type of engineering systems (mechanical, hydraulic, aerodynamics, electronics, etc.) in particular industry (aerospace, automotive, heavy machinery, etc.). These “traditional” engineers mainly are supposed to work inside the group of specialists with similar background, don’t getting outside particular field of knowledge very often. This approach works very well for the products with lightly coupled subsystems.
1.2 The Global Trend to Digitalization
In the 21st century, more and more products are becoming not just complicated, but complex, which means that more subsystems are becoming interconnected with each other. That leads to the fact that development using big, highly specialized departments is replaced by the principle of working in small mobile interdisciplinary groups. This trend implies increasing demand in cross-disciplinary educated employees, especially for advanced, MSc level. Nowadays, many Universities try to adjust their education programs in order to satisfy industry needs [1]. One more defining trend is enterprises digitalization [2], which changes the product development and its lifecycle management (see Fig. 1).

Digitalization, a massive trend in Industry 4.0 [2]
Product Lifecycle Management (PLM), as defined by CIMdata, is a business strategy that supports the development of products including the information needed to support them throughout their lifecycle. Digitalization affects PLM strategy of enterprises since now the software tools become the main instrument of companies PLM transformation and product development. Companies always tried to manage the lifecycle of their products; but, in most cases, they have done it using manual methods. Manual PLM cannot deal with today’s complex products and multi-disciplinary requirements. Moving engineering education into new ways of approaching and supporting product development and the complete lifecycle is essential to help companies exploit innovation that leads to continued business success [3].
Digitalization requires that physical product development has to be accompanied by its “digital twin” development in order to increase the data traceability and perform optimization with a minimum number of physical tests. This process is based on multi-scale, multi-domain physical simulation and so-called virtual testing. This could not be done by any single software tool. Modern PLM systems include product data management (PDM), mechanical CAD (MCAD), electrical CAD (ECAD), computer-aided engineering tools, simulation and analysis tools (SA and CAE), digital manufacturing, computer-aided manufacturing (CAM and NC), reporting and analytics, portfolio planning, requirements management, and many others [4]. Therefore, the practical skills in a bunch of software are in great demand in modern industry companies, which make their steps to digitalization.
2 Project-Based Engineering Courses Description
2.1 Systems-Driven Product Development for Engineering Education
Summing up, modern engineering courses should be based on the practical project-based activity, highly focused on real product “digital twin” development and testing. So-called systems driven product development (SDPD) is the state-of-the-art simulation-based methodology which allows to unite different phases of complex systems development and reuse created models for designing new products in the future [5]. In that approach, the whole process of system development is maintained under a single project, where all created models are interconnected and, hence, affect each other [6]. As a result, analysts can inspect influence of high-level models on specific system assemblies and architects can change high-level templates with a further automatic update of all affected submodels. Knowledge expansion from engineering area to related fields (Change Management, Configuration Management, Systems Engineering, Business processes, etc.) within PLM system is essential too as shown at [7]. The principle of the described approach is schematically presented in Fig. 2. The proposed approach should cover both branches of this diagram, with focusing on systems from a particular industry. Since the education process should be project-based the particular product is the basis of the courses. The small Unmanned Aerial Vehicle (UAV) was chosen as an object for the course, described in this paper.

V-diagram and systems-driven product development stages
The proposed approach is realized by the authors in two interconnected MSc level courses. The first-course “Advanced PLM I: Digital Design and Optimization” is dedicated to model-based systems engineering, design, and simulation, whereas the second-course “Advanced PLM II: Testing and Model Validation” is devoted to the UAV manufacturing and testing.
2.2 Course Description
The experimental course series was held for 2nd year MSc students from “Advanced and Digital Engineering Techniques” program. They were 6 students with a different background in aerospace, mechanical engineering, electrical engineering, applied physics. The duration of each course is 2 months, overall duration is 4 months. There are 3 classes per week, each 3 h long. 25% of the class time was dedicated to the lectures aiming to introduce different PLM principle and tools. All the lectures included some case studies from real life. Some of the classes have been held by external lecturers from industry. The rest time (75%) was devoted to practical work with software tools. It’s worth noting that despite students didn’t have an experience of using needed software minimum time was spent on tutorials (no more than 2 h) for every software tool. The courses finish with a final presentation, during which the project defence takes place and individual contribution of each student is evaluated.
2.3 Small Tube-Launched UAV Case Study
The task was to develop special UAV, which is able to be launched from the tube for fast take-off (Fig. 3). Such type of UAV has unusual structure caused by deployable wings, stabilizer, and propeller. Students had to design it from system level to detailed design level, produce the prototype and perform all required tests to verify the UAV “digital twin”. Multidisciplinary optimization techniques were used to obtain the optimal parameters of the UAV subsystems. The 3D-printing technology for UAV prototyping was chosen to maximize production automation.
The course was divided into several stages:
-
Model-based systems engineering, system architecture development;
-
Functional simulation using multi-domain models;
-
3D-detailed design and Computer-Aided Engineering;
-
Optimization;
-
Manufacturing and testing for models’ verification.

Tube-launched UAV concept
2.4 Model-Based Systems Engineering and 1D-simulation of UAV
Just basic requirements were given to the students at the beginning of the course, therefore they had to analyze and work it out themselves. The base architecture is built by the students, using LMS System Synthesis software, and systems engineering principles. Also, the requirements were created using Teamcenter PLM system. When the architecture is completed, it is possible to create different sets of simulation architectures, where unique parameters and physical configuration of the system are defined for each simulation. Then, the UAV architecture was divided into major subsystems which have been modeled by different students’ groups (Fig. 4).

UAV functional model and its main subsystems
These subsystems are power supply system, propulsion system, the launch system, structure and flight dynamics system. Each group created a set of models for the particular subsystem in LMS Amesim software. LMS Amesim software uses the bond-graph method to deal with multiphysical systems modeling. The advantage of such a software is an easy way to assemble the models of big multi-domain systems using libraries of verified components. During working on each subsystem model, students collaborate between groups in order to find appropriate parameters and link the subsystems together satisfying the conditions for the energy, heat and mass balance. Some results of systems design and analysis are presented in Fig. 5 (stage I - take-off; II - climbing; III - cruise flight).
After the area of the stable solution was found the global optimization was performed using differential evolution method in Optimus software and optimal parameters have been found for each subsystem. The conceptual design of UAV arrangement was made during this stage too. In considered case, the students made a decision to choose canard scheme.

UAV absolute altitude position during different stages of motor launch (a), influence of launch angle on altitude position (b) and comparison of different engine launch strategies by absolute UAV velocity (c)
2.5 3D Simulation and Design of UAV
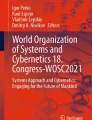
Computational Fluid Dynamics (CFD) analysis using ANSYS Fluent/CFX and STAR-CCM+ for Lift and Drag calculation and polar curves plotting was performed (see Fig. 6) Particular attention was paid to CFD results verification. This was done by comparing results, obtained by different solvers (ANSYS CFX, ANSYS Fluent, CTAR-CCM) and different turbulence models. The maximum difference in Lift coefficient was less than 5%, whereas for Drag coefficient it was 12%. The ability to estimate the correctness of numerical simulation results is essential for engineers, therefore significant efforts were spent to this during the course.

CFD analysis of UAV (a), Polar curves for Lift (b) and Drag (c) coefficients over angle of attack
The wing structural analysis was performed using Finite Element Analysis. Siemens Simcenter 3D was used to calculate the stresses due to aerodynamic forces considering different load cases (take-off, climbing, cruise). The optimization of the wing structure was performed using a surrogate-based algorithm (Fig. 7). The wing consists of plastic body and composite spar. The connection between the spar and plastic wing root is the weakest place, where maximum stresses occur. The main task for the students was to reduce the stresses with constraints on wing mass using the parametric model of the wing and external optimization solver. The wing structure was obtained as a result.

Combination of finite-element analysis and Computational Fluid Dynamics for structural analysis and optimization
In addition, nonlinear dynamic drop analysis in Abaqus software was performed for hard landing simulation and coupled Thermal-Flow simulation in Comsol software was made for UAV motor cooling estimation. Comprehensive 3D design and analysis allowed to obtain the detailed UAV model validated by virtual tests and reduced a time needed for prototype manufacturing.
After 1D and 3D-simulations have been performed, the structural and subsystems parameters were defined, the detailed 3D design of the UAV structure was implemented in NX software. The detailed structure including electronic components has been developed simultaneously by different students and managed using Teamcenter PLM platform (Fig. 8). The geometry parameters such as moments of inertia were obtained from the CAD model in order to update the flight dynamics model in LMS Amesim.

CAD models of the UAV in folded (a) and deployed (b) state, side view (c) and components view (d)
2.6 Testing and Prototyping
The UAV testing including static material tests for material selection, Hardware-in-the-Loop testing of UAV control system and destructive static tests of the wings was performed. The main purpose of the tests was to verify and validate UAV “digital twin”. First of all, static tests were held for material properties evaluation (see Fig. 9). The tests have shown that PLA plastic is the optimal choice among compared materials. The properties, obtained from static tests (Young module and Poisson ratio) were used to update the UAV FE-models. The structure then was manufactured using Fused Deposition Modeling 3D-printers.

Material testing and evaluation: 3-points bending (a), tensile test (b), specimen after testing (c)
In order to validate the 1D-model of the UAV including control system model the Hardware-in-the-Loop (HiL) approach was used. HiL testing involves putting the UAV 1D-model on the real-time board and co-simulation between real prototype (using LabView) and digital prototype (using LMS Amesim) under the same conditions (Fig. 10). The parameters to be verified included propeller rotary speed, engine temperature, control servos feedback current and thrust force. The HiL testing allowed students to verify the models, built in LMS Amesim and obtain the functional model, capable to predict dynamic behavior under transient conditions.

Hardware-in-the-Loop scheme (a), HiL test-bench (b), HiL test-model comparison results (c)
Finally, The UAV prototype was assembled and launched for test flights with wings, fixed in deployed position (Fig. 11).

UAV prototype and students team
3 Conclusions
3.1 Results of the Experimental Course
Small students team managed to design, prototype and test complex system on a very tight schedule. They got familiar with PLM/CAD/CAE tools and learned to work in a team. The feedback from the students is totally positive and resulted in increasing the number of course attendees to 22, this year. Very important knowledge obtained during the course is a hands-on experience of end-to-end design of the real product. All the students successfully graduated from University and will bring their SDPD experience to the industrial enterprises. Several aerospace companies representatives visited the project defence and appreciated the course results. There is a lack of time as a shortcoming of the course, so some important testing procedures (vibration and modal testing, autopilot testing, tube launch test) weren’t done. Therefore, future course series will be elongated to 6 months and will consist of three courses devoted to Design, Prototyping and Testing.
3.2 Future Work
To make the transition from “digital prototype” to real “digital twin” the described educational process should include working with Internet of Things (IoT) platform, collecting data and updating the model in real-time. The IoT platforms such as GE Predix or Siemens Mindsphere should be used for this purpose.
References
Onar, S.C., et al.: The changing role of engineering education in industry 4.0 era. In: Onar, S.C., et al. (eds.) Industry 4.0: Managing The Digital Transformation. Springer, Cham, pp. 137–151 (2018)
Roser, C.: “Faster, Better, Cheaper” in the History of Manufacturing: From the Stone Age to Lean Manufacturing and Beyond, 1st edn. Productivity Press, USA (2016)
CIMdata white paper: are Students ‘Real-World’ Ready? https://www.cimdata.com/en/news/item/8127-cimdata-publishes-are-students-real-world-ready. Accessed 10 May 2018
Siemens PLM white paper: Systems-Driven Cross-Industry Product Development. https://www.plm.automation.siemens.com/en/products/teamcenter/systems-engineering-software/. Accessed 10 May 2018
Pavasson, J., et al.: Challenges and opportunities within simulation-driven functional product development and operation. Procedia CIRP 22, 169–174 (2014)
Lindstrom, J., et al.: Functional product development: what information should be shared during the development process? Int. J. Prod. Dev. 16(2), 95–111 (2012)
Motyl, B., et al.: How will change the future engineers’ skills in the Industry 4.0 framework? A questionnaire survey. Procedia Manufact. 11, 1501–1509 (2017)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 IFIP International Federation for Information Processing
About this paper

Cite this paper
Nikolaev, S., Gusev, M., Padalitsa, D., Mozhenkov, E., Mishin, S., Uzhinsky, I. (2018). Implementation of “Digital Twin” Concept for Modern Project-Based Engineering Education. In: Chiabert, P., Bouras, A., Noël, F., Ríos, J. (eds) Product Lifecycle Management to Support Industry 4.0. PLM 2018. IFIP Advances in Information and Communication Technology, vol 540. Springer, Cham. https://doi.org/10.1007/978-3-030-01614-2_18
Download citation
DOI: https://doi.org/10.1007/978-3-030-01614-2_18
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-01613-5
Online ISBN: 978-3-030-01614-2
eBook Packages: Computer ScienceComputer Science (R0)