
Abstract
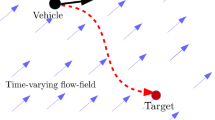
In this paper, we consider some game-theory problems of group pursuit of a target under perturbations. Here, the players are unmanned flight vehicles (FVs) whose mathematical models are given by transfer functions that describe a double-loop control system with an autopilot and certain settings to provide the necessary stability of flight. According to the separation principle, without loss of generality, solutions are considered in a pitch plane. In the case of an antagonistic game, the velocity of the target is higher than that of the pursuers. The problem is solved when one of the pursuers gets close enough to the target or when the target manages to evade the pursuers. The target tracking problem implies that a randomly-arranged FV group approaches the target and flights near it during a specified time period. The low-velocity target seeks to evade the pursuers as far as possible. Finally, in the path following problem, each FV needs to fly along the trajectory given by the motion of a corresponding reference target. In the process of problem solving, each FV implements a set of heuristic behavioral strategies in a perturbed environment by following the rules of pitch angle and velocity selection. In the experimental part of this paper, some situations typical for these problems are modeled.
Similar content being viewed by others


References
Friesz, T.L., Dynamic optimization and differential games, International Series in Operations Research & Management Science, Springer Science + Business Media, LLC, 2010.
Wei Lin, Differential games for multi-agent systems under distributed information, PhD Thesis, University of Central Florida, 2013.
Krasovskii, N.N. and Kotel’nikova, A.N., Stochastic control in a determinate differential approach–evasion game, Avtom. Telemekh., 2011, no. 2, pp. 93–110.
Ukhobotov, V.I. and Zaitseva, O.V., The game task of an impulse meeting with a mixed restriction on the control of a second player, Vestn. YuUrGU, Ser. Mat. Fiz. Khim., 2007, no. 19, pp. 55–60.
Vagin, D.A., Persecution of rigidly coordinated evaders, Cand. Sci. (Phys.-Math.) Dissertation, Izhevsk, 2003.
Dongxu Li, Multi-player pursuit-evasion differential games, PhD Thesis, Ohio: State University, 2006.
Wei, M., Chen, G., Cruz, J.B., Haynes, L., Pham, K., and Blasch, E., Multi-pursuer multi-evader pursuitevasion games with jamming confrontation, J. Aerosp. Comput. Inf. Commun., 2007, vol. 4, no. 3, pp. 693–706.
Sidney, N., Givigi, Jr., and Schwartz, H.M., Decentralized strategy selection with learning automata for multiple pursuer-evader games, Adapt. Behav., 2014, vol. 22, pp. 221–234.
Petrov, N.N., About one pursuit problem with many evaders, Vestn. Udmurt. Univ., 2000, no. 1, pp. 131–136.
Petrov, N.N., A simple pursuit of rigidly coordinated evaders, Avtom. Telemekh., 1997, no. 12, pp. 89–95.
Petrosyan, L.A. and Rikhsiev, B.B., Presledovanie na ploskosti (Pursuit on the Plane), Moscow: Nauka, 1991.
Abramov, N.S., Makarov, D.A., and Khachumov, M.V., Controlling flight vehicle spatial motion along a given route, Autom. Remote Control, 2015, vol. 76, no. 6, pp. 1070–1080.
Abramov, N.S. and Khachumov, M.V., Simulation of wiring along the route of an unmanned aerial vehicle as a target pursuit problem, Aviakosm. Priborostr., 2013, no. 9, pp. 9–22.
Author information
Authors and Affiliations
Corresponding author
Additional information
Original Russian Text © M.V. Khachumov, 2016, published in Iskusstvennyi Intellekt i Prinyatie Reshenii, 2016, No. 2, pp. 46–54.
About this article

Cite this article
Khachumov, M.V. Problems of Group Pursuit of a Target in a Perturbed Environment. Sci. Tech. Inf. Proc. 44, 357–364 (2017). https://doi.org/10.3103/S0147688217050069
Published:
Issue Date:
DOI: https://doi.org/10.3103/S0147688217050069