
Abstract
Snake-like robots have gained popularity in the last three decades for their ability to utilize several gaits in order to navigate through different terrains. They are analogous in morphology to snakes, tentacles, and elephant trunks. We propose a novel method of navigating a snake-like robot based on the Harmonic Field with Optimized Boundary Conditions (HFOBC) and a boundary following algorithm. We apply the HFOBC navigation function using a number of fictitious charges equally spaced on each link. These charges actively follow the potential field towards the target. Futhermore, a generalized mathematical model for an n-link snake-like robot based on Lagrange formulation has also been proposed in this paper.
Similar content being viewed by others


Abbreviations
- \( \vec p_i \) :
-
A vector from the robot to the obstacle O i
- \( \vec p_\beta \) :
-
A vector from the robot to the target β
- \( U_i (\vec p_i ) \) :
-
A repelling potential field due to the obstacle i
- \( U_\beta (\vec p_\beta ) \) :
-
Attractive potential field due to target β
- \( \varphi (\vec p) \) :
-
Harmonic potential field value for vector \( \vec p \)
- L :
-
Minimum distance from the robot to the closest obstacle
- R :
-
Safety distance
- \( \vec n \) :
-
A unit vector perpendicular to the boundary in the direction of the robot
- \( \vec \tau \) :
-
A unit vector tangential to the boundary in the direction of the negative gradient of the potential field
- N i :
-
Number of charges on link i in the snake robot
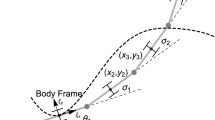
- (x i , y i ):
-
Position of the center of gravity of the link i
- (x 0, y 0):
-
Position of the first charge of the first link
- m i :
-
Mass of link i
- l i :
-
Length of link i
- θ i :
-
Angle of link i with the global x-axis
- ψ i :
-
Angle between link i and link i − 1
- T :
-
Kinetic energy
- V :
-
Potential energy
- k :
-
Torsional spring constant
- M :
-
Inertia matrix
- C :
-
Coriolis terms vector
- G :
-
Potential energy vector
- q i :
-
Generalized coordinate
- Q a :
-
Generalized forces vector due to actuators
- Q c :
-
Generalized forces vector due to charges’ forces
- Z i :
-
Position of the beginning of link i
- \( \vec r_j^i \) :
-
Position of charge j on link i
- \( \delta \vec r_j^i \) :
-
Virtual displacement of the charge j on the link i
- δ W :
-
Virtual work
- \( \vec F_j^i \) :
-
The potential field force acting on charge j on the link i
References
S. Hirose, Biologically Inspired Robots: Snake-Like Locomotors and Manipulators, Oxford University Press, Oxford, 1993.
E. Paljug, T. Ohm, and S. Hayati, “The JPL serpentine robot: a 12- dof system for inspection,” IEEE Int. Conf. on Robotics and Automation, Nagoya, Aichi, Japan, vol. 3, May 1995, pp. 3143–3148.
S.H. Yamada, M. Chigisaki, K. Mori, K. Takita, K. Ogami, S. Hirose, “Development of amphibious snake-like robot ACM-R5,” Proc. 36th Int. Symp. Robotics, Tokyo, Japan, Nov. 2005, pp. 163–175.
M. Nilsson, “Serpentine locomotion on surfaces with uniform friction,” Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Sendai, Japan, Sep. 2004, pp. 1751–1755.
P. Liljeback, Ø. Stavdahl, and K. Y. Pettersen, “Modular pneumatic snake robot: 3D modelling, implementation and control,” Proc. 16th IFAC World Congress, Prague, Czech Republic, July 2005, pp. 1–5.
T. Kamegawa, T. Yarnasaki, H. Igarashi, and F. Matsuno, “Development of the snake-like rescue robot ‘Kohga’,” Proc. IEEE Int. Conf. on Robotics and Automation, New Orleans, LA, April 2004, pp. 5081–5086.
S.A. Fjerdingen, J.R. Mathiassen, H. Schumann-Olsen, and E. Kyrkjebø, “Adaptive Snake Robot Locomotion: A Benchmarking Facility for Experiments,” European Robotics Symposium, Czech Republic, vol. 44, March 2008, pp. 13–22.
A. Wolf, H. Choset, H.B. Brown, and R. Casciola, “Design and Control of a Mobile Hyper-Redundant Urban Search and Rescue Robot, International Journal of Advanced Robotics, vol 19, no. 8, 2005, pp. 221–248.
P. Liljeback,. Stavdahl, and A. Beitnes, “SnakeFighter: development of a water hydraulic fire-fighting snake robot,” Proc. IEEE Int. Conf. Control, Automation, Robotics, and Vision, Dec. 2006, pp 1–6.
N. Takanashi, H. Choset, and J. Burdick, “Experimental Results for Sensor Based Planning for Hyper-redundant Manipulators,” IEEE/RSJ International Conference on Intelligent Robots and Systems, Yokohama, Japan, 1993, pp. 636–643.
H. Choset and J. Burdick, “Extensibility in Local Sensor Based Planning For Hyper Redundant Manipulators (Robot Snakes),” Conference on Intelligent Robotics in Field, Factory, Service and Space (CIRFFSS 1994), Houston, Texas, 1994, pp. 820–829.
W. Henning, F. Hickman, and H. Choset, “Motion Planning for Serpentine Robots,” ASCE Space and Robotics, Albuquerque, New Mexico, 1998, pp. 1–7.
Jinguo Liu, Yuechao Wang, Bin Ii, and Shugen Ma, “Path planning of a snake-like robot based on serpenoid curve and genetic algorithms,” World Congress on Intelligent Control and Automation, vol. 6, June 2004, pp. 4860–4864.
E.S. Conkur, “Path planning using potential fields for highly redundant manipulators,” Robotics and Autonomous Systems, vol. 52, August 2005, pp. 209–228.
E.S. Conkur and R. Gurbuz, “Path Planning Algorithm for Snake-Like Robot,” Information Technology and Control, 2008, vol. 37,no.2, pp. 159–162.
Y. Cheng, P. Jiang, and Y.F. Hu, “A-Snake: Integration of path planning with control for mobile robots with dynamic constraints,” The 2nd International Conference on Computer and Automation Engineering, Feb. 2010, pp. 127–134.
D. Yagnik, R. Jing, and R. Liscano, “Motion planning for multi-link robots using Artificial Potential Fields and modified Simulated Annealing,” IEEE/ASME International Conference on Mechatronics and Embedded Systems and Applications, July 2010, pp 421–427.
J.E. Slotine and W. Li, “On the Adaptive Control of Robot Manipulators,” The International Journal of Robotic Research, vol. 6,no. 3, Sep. 1987, pp. 49–59.
J.H. Ginsberg, Advanced Dynamics, New York, NY, Cambridge University Press, 1998.
C. Connolly, R. Weiss, and J. Burns, “Path Planning Using Laplace’s Equation,” IEEE Int. Conf. Robotics and Automation, Cincinnati, OH, May 1990, pp. 2102–2106.
D. Alvarez, J.C. Alvarez, and R.C. Gonzalez, “Online Motion Planning using Laplace Potential Fields,” IEEE lnt. Conf. Robotics and Automation, Taipei, Taiwan, Sep. 2003, pp. 3347–3352.
S. Charifa and M. Bikdash, “Comparison of geometrical, kinematic, and dynamic performance of several potential field methods,” IEEE Southeast Conference, Atlanta, GA, March 2009, pp. 18–23
M. Bikdash and S. Charifa, “Rigid Body Navigation Using a Combined Optimized Potential Field and a Boundary Following Algorithm,” Mathematical and Computational Applications, accepted, 2010.
S. Charifa and M. Bikdash “Adaptive boundary-following algorithm guided by artificial potential field for robot navigation”, IEEE Workshop on Robotic Intelligence in Informationally Structured Space, Nashville, TN, March 2009, pp. 38–45.
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Charifa, S., Bikdash, M. Motion planning of a snake-like robot using an optimized harmonic potential field. Paladyn 1, 187–197 (2010). https://doi.org/10.2478/s13230-011-0005-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.2478/s13230-011-0005-9