
Abstract
Current curve smoothing technologies provide a smoothed curve by joining together separate curves that have certain degrees of continuity at junctions. These technologies have found many applications in science and engineering. However, none of them can provide a smoothed curve using a single continuous function for arbitrary segmental curves. This paper reports a new approach that can be used to construct a single continuous function that joins an arbitrary number of different segmental curves, with the required degree of continuity at all junctions. The smoothness of transition at different junctions can be controlled by separate parameters to suit different needs. The combined continuous function can approach the original segmental functions asymptotically or match the original segmental functions “exactly” inside each segment by adjusting the smoothness parameter. This new approach may also find application outside the scope of curve smoothing/curving fitting in the future.
概要
目的
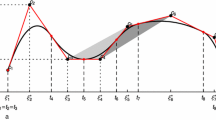
用连续函数实现无限接近原始非连续曲线的光滑。
创新点
首次提出用一个连续函数替代原来由任意多非连 续区域函数构成的函数。该方法可视为一种新的 函数光滑算法。
方法
1. 通过引入特殊的区域变量,并用该区域变量替 代原函数自变量的方法,将区域函数改造成在该 区域无限接近原函数而在区域外取值常数的函 数。2. 把所有的区域函数相乘得到一个连续函数 的方程。
结论
1. 由任意多非连续区域函数构成的函数可以改造 成一个连续函数。2. 该连续函数在原非连续边界 的光滑程度可以由各个边界上独立的参数按需 调整。3. 该方法产生的连续函数没有摆动现象, 其形状与原始区域函数无限接近。该方程在数学 上是连续的,同时无限接近原始非连续函数,包 括原来在边界上函数值的非连续。
Similar content being viewed by others


References
Cai HH, Wang GJ, 2009. A new method in highway route design: joining circular arcs by a single C-Bézier curve with shape parameter. Journal of Zhejiang University-SCIENCE A, 10(4):562–569. https://doi.org/10.1631/jzus.A0820267
CEB (Comite Euro-International du Beton), 1993. CEB-FIP Model Code 1990: Design Code FIB-Fédération Internationale du Beton.
Emami MM, Arezoo B, 2010. A look-ahead command generator with control over trajectory and chord error for NURBS curve with unknown arc length. Computer-Aided Design, 42(7):625–632. https://doi.org/10.1016/j.cad.2010.04.001
Erkorkmaz K, Altintas Y, 2001. High speed CNC system design. Part I: jerk limited trajectory generation and quintic spline interpolation. International Journal of Machine Tools and Manufacture, 41(9):1323–1345. https://doi.org/10.1016/S0890-6955(01)00002-5
Feng J, Li Y, Wang Y, et al., 2010. Design of a real-time adaptive NURBS interpolator with axis acceleration limit. The International Journal of Advanced Manufacturing Technology, 48(1–4): 227–241. https://doi.org/10.1007/s00170-009-2261-y
Fraichard T, Scheuer A, 2004. From Reeds and Shepp’s to continuous-curvature paths. IEEE Transactions on Robotics, 20(6):1025–1035. https://doi.org/10.1109/TRO.2004.833789
Giuffre A, Pinto PE, 1970. Il comportamento del cemento armato per sollecitazioni cicliche di forte intensita. Giornale del Genio Civile, 5:391–408 (in Italian).
Hognestad E, 1951. A Study of Combined Bending and Axial Load in Reinforced Concrete Members. Bulletin Series No. 399, Engineering Experiment Station, University of Illinois, Urbana, USA.
Huh UY, Chang SR, 2014. A G² continuous path-smoothing algorithm using modified quadratic polynomial interpolation. International Journal of Advanced Robotic Systems, 11(2):1–11. https://doi.org/10.5772/57340
Lin MT, Tsai MS, Yau HT, 2007. Development of a dynamicsbased NURBS interpolator with real-time look-ahead algorithm. International Journal of Machine Tools and Manufacture, 47(15):2246–2262. https://doi.org/10.1016/j.ijmachtools.2007.06.005
Liu X, Ahmad F, Yamazaki K, et al., 2005. Adaptive interpolation scheme for NURBS curves with the integration of machining dynamics. International Journal of Machine Tools and Manufacture, 45(4–5): 433–444. https://doi.org/10.1016/j.ijmachtools.2004.09.009
Magid E, Keren D, Rivlin E, et al., 2006. Spline-based robot navigation. Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, p.2296-2301.
Nam SH, Yang MY, 2004. A study on a generalized parametric interpolator with real-time jerk-limited acceleration. Computer-Aided Design, 36(1):27–36. https://doi.org/10.1016/S0010-4485(03)00066-6
Pan J, Wu YF, 2014. Analytical modeling of bond behavior between FRP plate and concrete. Composites Part B: Engineering, 61:17–25. https://doi.org/10.1016/j.compositesb.2014.01.026
Park R, Paulay T, 1975. Reinforced Concrete Structures. John Wiley & Sons, New York.
Pateloup V, Duc E, Ray P, 2010. Bspline approximation of circle arc and straight line for pocket machining. Computer-Aided Design, 42(9):817–827. https://doi.org/10.1016/j.cad.2010.05.003
Richard RM, Abbott BJ, 1975. Versatile elastic-plastic stressstrain formula. Journal of the Engineering Mechanics Division, 101:511–515.
Roy R, Bodduna K, Kumari N, et al., 2015. A fast and efficient mesh smoothing algorithm for 3D graphical models using cubic B-splines. In: Information Systems Design and Intelligent Applications. Springer, New Delhi, India, p.467-474. https://doi.org/10.1007/978-81-322-2247-7_48
Walton DJ, Meek DS, 2009. G2 blends of linear segments with cubics and pythagorean-hodograph quintics. International Journal of Computer Mathematics, 86(9):1498–1511. https://doi.org/10.1080/00207160701828157
Walton DJ, Meek DS, 2010. Cubic Bézier spiral segments for planar G2 curve design. Proceedings of the 7th International Conference on Computer Graphics, Virtual Reality, Visualisation and Interaction in Africa, ACM, p.21-26.
Wang JB, Yau HT, 2009. Real-time NURBS interpolator: application to short linear segments. International Journal of Advanced Manufacturing Technology, 41(11-12): 1169–1185. https://doi.org/10.1007/s00170-008-1564-8
Wu G, Sun ZY, Wu ZS, et al., 2012. Mechanical properties of steel-FRP composite bars (SFCBs) and performance of SFCB reinforced concrete structures. Advances in Structural Engineering, 15(4):625–636. https://doi.org/10.1260/1369-4332.15.4.625
Yang K, Sukkarieh S, 2010. An analytical continuouscurvature path-smoothing algorithm. IEEE Transactions on Robotics, 26(3):561–568. https://doi.org/10.1109/TRO.2010.2042990
Yang X, Chen ZC, 2006. A practicable approach to G1 biarc approximations for making accurate, smooth and nongouged profile features in CNC contouring. Computer-Aided Design, 38(11):1205–1213. https://doi.org/10.1016/j.cad.2006.07.006
Yau HT, Wang JB, 2007. Fast Bezier interpolator with realtime look ahead function for high-accuracy machining. International Journal of Machine Tools and Manufacture, 47(10):1518–1529. https://doi.org/10.1016/j.ijmachtools.2006.11.010
Yeh SS, Hsu PL, 2002. Adaptive-feedrate interpolation for parametric curves with a confined chord error. Computer-Aided Design, 34(3):229–237. https://doi.org/10.1016/S0010-4485(01)00082-3
Zhang LB, You YP, He J, et al., 2011. The transition algorithm based on parametric spline curve for high-speed machining of continuous short line segments. International Journal of Advanced Manufacturing Technology, 52(1–4): 245–254. https://doi.org/10.1007/s00170-010-2718-z
Author information
Authors and Affiliations
Corresponding author
Additional information
Project supported by the National Natural Science Foundation of China (No. 51378449)
Rights and permissions
About this article

Cite this article
Wu, Yf., He, L. & Li, Zd. Curve smoothing using a continuous function. J. Zhejiang Univ. Sci. A 19, 304–314 (2018). https://doi.org/10.1631/jzus.A1700502
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1631/jzus.A1700502