
Abstract
Soft robots are being developed to mimic the movement of biological organisms and as wearable garments to assist human movement in rehabilitation, training, and tasks encountered in functional daily living. Stretchable artificial muscles are well suited as the active mechanical element in soft wearable robotics, and here the performance of highly stretchable and compliant polymer coil muscles are described and analyzed. The force and displacements generated by a given stimulus are shown to be determined by the external loading conditions and the main material properties of free stroke and stiffness. Spring mechanics and a model based on a single helix are used to evaluate both the coil stiffness and the mechanism of coil actuation. The latter is directly coupled to a torsional actuation in the twisted fiber that forms the coil. The single helix model illustrates how fiber volume changes generate a partial fiber untwist, and spring mechanics shows how this fiber untwist generates large tensile strokes and high gravimetric work outputs in the polymer coil muscles. These analyses highlight possible as yet unexplored means for further enhancing the performance of these systems.











Similar content being viewed by others


References
H. Shen: The soft touch. Nature 530, 24 (2016).
R. Pfeifer, M. Lungarella, and F. Iida: Self-organization, embodiment, and biologically inspired robotics. Science 318, 1088 (2007).
D. Rus and M.T. Tolley: Design, fabrication and control of soft robots. Nature 521, 467 (2015).
S. Viteckova, P. Kutilek, and M. Jirina: Wearable lower limb robotics: A review. Biocybern. Biomed. Eng. 33, 96 (2013).
R. Cowan, B.J. Fregly, M.L. Boninger, L. Chan, M.M. Rodgers, and D.J. Reinkensmeyer: Recent trends in assistive technology for mobility. J. Neuroeng. Rehabil. 9, 20 (2012).
H. Herr: Exoskeletons and orthoses: Classification, design challenges and future directions. J. Neuroeng. Rehabil. 6, 21 (2009).
J.L. Pons: Rehabilitation exoskeletal robotics. IEEE Eng. Med. Biol. Mag., 29 (3), 57 (2010).
A.T. Asbeck, S.M.M. de Rossi, K.G. Holt, and C.J. Walsh: A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 34, 744 (2015).
P. Polygerinos, Z. Wanga, K.C. Galloway, R.J. Wood, and C.J. Walsh: Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Autonom. Syst. 73, 135 (2015).
L.M. Mooney, E.J. Rouse, and H.M. Herr: Autonomous exoskeleton reduces metabolic cost of human walking during load carriage. J. Neuroeng. Rehabil. 11, 80 (2014).
G.S. Sawicki and D.P. Ferris: Powered ankle exoskeletons reveal the metabolic cost of plantar flexor mechanical work during walking with longer steps at constant step frequency. J. Exp. Biol. 212, 21 (2009).
P. Malcolm, W. Derave, S. Galle, and D. De Clercq: A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of human walking. PLoS One 8, e56137 (2013).
E. Mattar: A survey of bio-inspired robotics hands implementation: New directions in dexterous manipulation. Robot. Autonom. Syst. 61, 517 (2013).
C.S. Haines, M.D. Lima, N. Li, G.M. Spinks, J. Foroughi, J.D.W. Madden, S.H. Kim, S. Fang, M.J. de Andrade, F. Goktepe, O. Goketpe, S.M. Mirvakili, S. Naficy, X. Lepro, J. Oh, M.E. Kozlov, S.J. Kim, X. Xu, B.J. Swedlove, G.G. Wallace, and R.H. Baughman: Artificial muscles from fishing line and sewing thread. Science 343, 868 (2014).
M.C. Yip and G. Niemeyer: High-performance robotic muscles from conductive nylon sewing thread (IEEE Int. Conf. Robot. Autom., Seattle, May 2015), 2313–2318.
A.B. Zoss, H. Kazerooni, and A. Chu: Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE ASME Trans. Mechatron. 11, 128 (2006).
V. Giurgiutiu, C.A. Rogers, A. Rogers, and Z. Chaudhry: Energy-based comparison of solid-state induced-strain actuators. J. Intell. Mater. Syst. Struct. 7, 4 (1996).
G.M. Spinks, L. Liu, G.G. Wallace, and D. Zhou: Strain response from polypyrrole actuators under load. Adv. Funct. Mater. 12, 437 (2002).
A. Cherubini, G. Moretti, R. Vertechy, and M. Fontana: Experimental characterization of thermally-activated artificial muscles based on coiled nylon fishing lines. AIP Adv. 5, 067158 (2015).
W. Zheng, G. Alici, P.R. Clingan, B.J. Munro, G.M. Spinks, J.R. Steele, and G.G. Wallace: Polypyrrole stretchable actuators. J. Polym. Sci., Part B: Polym. Phys. 51, 57 (2013).
G.M. Spinks, T.E. Campbell, and G.G. Wallace: Force generation from polypyrrole actuators. Smart Mater. Struct. 14, 406 (2005).
S. Aziz, S. Naficy, J. Foroughi, H.R. Brown, and G.M. Spinks: Controlled and scalable torsional actuation of twisted nylon 6 fiber. J. Polym. Sci., Part B: Polym. Phys. 54, 1278 (2016).
S. Aziz, S. Naficy, J. Foroughi, H.R. Brown, and G.M. Spinks: Characterisation of torsional actuation in highly twisted yarns and fibres. Polym. Test. 46, 88 (2015).
J. Foroughi, G.M. Spinks, G.G. Wallace, J. Oh, M.E. Kozlov, S. Fang, T. Mirfakhrai, J.D.W. Madden, M.K. Shin, S.J. Kim, and R.H. Baughman: Torsional carbon nanotube artificial muscles. Science 334, 494 (2011).
M.D. Lima, N. Li, M.J. de Andrade, S. Fang, J. Oh, G.M. Spinks, M.E. Kozlov, C.S. Haines, D. Suh, J. Foroughi, S.J. Kim, Y. Chen, T. Ware, M.K. Shin, L.D. Machado, A.F. Fonseca, J.D.W. Madden, W.E. Voit, D.S. Galvão, and R.H. Baughman: Electrically, chemically, and photonically powered torsional and tensile actuation of hybrid carbon nanotube yarn muscles. Science 338, 928 (2012).
S.M. Mirvakili, A. Pazukha, W. Sikkema, C.W. Sinclair, G.M. Spinks, R.H. Baughman, and J.D.W. Madden: Niobium nanowire yarns and their application as artificial muscles. Adv. Funct. Mater. 23, 4311 (2013).
C.L. Choy, F.C. Chen, and K. Young: Negative thermal expansion in oriented crystalline polymers. J. Polym. Sci., Polym. Phys. Ed. 19, 335 (1981).
Y. Kobayashi and A. Keller: The temperature coefficient of the c lattice parameter of polyethylene; an example of thermal shrink age along the chain direction. Polymer 11, 114 (1970).
L.R.G. Treloar: Rubber Elasticity (Oxford University Press, Oxford, 1975).
A.L. Ross: Cable kinking analysis and prevention. Trans. ASME, 99, 112 (1977).
F.B. Fuller: The writhing number of a space curve. Proc. Natl. Acad. Sci. U.S.A. 68, 915 (1971).
ACKNOWLEDGMENTS
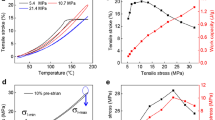
The author thanks Dharshika Kongahage and Dr. Sina Naficy for providing the experimental data of Figures 4 and 5. The author also thanks Professors Ray Baughman (University of Texas at Dallas), John D.W. Madden (University of British Columbia), and Seon Jeong Kim (Hanyang University) for valuable discussions. Financial support for this work was provided by the Australian Research Council (DP 110101073).
Author information
Authors and Affiliations
Corresponding author
Additional information
This paper has been selected as an Invited Feature Paper.
Rights and permissions
About this article

Cite this article
Spinks, G.M. Stretchable artificial muscles from coiled polymer fibers. Journal of Materials Research 31, 2917–2927 (2016). https://doi.org/10.1557/jmr.2016.316
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1557/jmr.2016.316