
Abstract
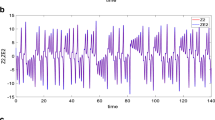
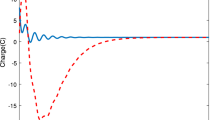
This paper deals with observer design for generalized Hamiltonian systems and its applications. First, by using the systems’ structural properties, a new observer design method called Augment Plus Feedback is provided and two kinds of observers are obtained: non-adaptive and adpative ones. Then, based on the obtained observer, H ∞ control design is investigated for generalized Hamiltonian systems, and an observer-based control design is proposed. Finally, as an application to power systems, an observer and an observer-based H ∞ control law are designed for single-machine infinite-bus systems. Simulations show that both the observer and controller obtained in this paper work very well.
Similar content being viewed by others
References
Luenberger, D. G., Observers for multivariable systems, IEEE Trans. on Autom. Contr., 1966, 11: 190–197.
O’Reilly, J., Observer for linear systems, New York: Academic Press, 1983.
Slotine, J. J. E., Hedrick, J. K., Misawa, E.A., On sliding observers for nonlinear systems, Journal of Dynamic Systems, Measurement and Control, 1987, 109: 245–252.
Hunt, L. R., Verma, M. S., Observers for nonlinear systems in steady state, IEEE Trans. on Autom. Contr., 1994, 39(10): 2113–2118.
Park, J. K., Shin, D. R., Chung, T. M., Dynamic observers for linear time-invariant systems, Autimatica, 2002, 38: 1083–1087.
Giua, A., Seatzu, C., Basile, F., Observer-based state-feedback control of timed petri nets with deadlock recovery, IEEE Trans. on Autom. Contr., 2004, 49(1): 17–29.
Maschke, B. M., Ortega, R., van der Schaft, A. J., Energy-based Lyapunov functions for forced Hamiltonian systems with dissipation, IEEE Transactions on Automatic Control, 2000, 45(8): 1498–1502.
Ortega, R., van der Schaft, A. J., Maschke, B., et al., Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems, Automatica, 2002, 38(4): 585–596.
Cheng, D., Xi, Z., Hong, Y. et al., Energy-based stabilization in power systems, in Proceedings of the 14th IFAC World Congress, Beijing, China, Vol.O, 1999, Oxford: Pergamon Press, 1999, 297–303.
Shen, T., Ortega, R., Lu, Q. et al., Adaptive L 2 disturbance attenuation of Hamiltonian systems with parameter perturbations and application to power systems, in Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, Australia, Vol.5, 2000, New York: IEEE, 2000, 4939–4944.
Sun, Y., Shen, T., Ortega, R. et al., Decentralized controller design for multimachine power systems on Hamiltonian structure, in Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, Florida. New York: IEEE, 2001, 3045–3050.
Xi, Z., Cheng, D., Passivity-based stabilization and H ∞ control of the Hamiltonian control systems with dissipation and its application to power systems, Int. J. of Control, 2000, 73(18): 1686–1691.
Wang, Y., Cheng, D., Li, C. et al., Dissipative Hamiltonian realization and energy-based L 2-disturbance attenuation control of multimachine power systems, IEEE Trans. on Autom. Contr., 2003, 48(8): 1428–1433.
Wang, Y., Li, C., Cheng, D., Generalized Hamiltonian realization of time-invariant nonlinear systems, Automatica, 2003, 39(8): 1437–1443
Wang, Y., Li, C., Cheng, D., New approaches to dissipative Hamiltonian realization of nonlinear systems, Science in China, Ser. F, 2003, 46(6): 431–444.
Hebert, S. R., Cruz-Hernandez, C., Synchronization of chaotic systems: A Hamiltonian approach, in Proceedings of the American Control Conference, Chicago, Illinois, June, New York: IEEE, 2000, 769–773.
Lohmiller, W., Slotine, J. J. E., Simple observers for Hamiltonian systems, in Proceedings of the American Control Conference, Albuquerque, New Mexico, June, New York: IEEE, 1997, 2748–2753.
Lu, Q., Sun, Y., Nonlinear Control of Power Systems, Beijing: Science Press, 1993.
van der Schaft, A. J., L 2-gain and Passivity Techniques in Nonlinear Control, Berlin: Springer, 1999.
Khalil, H., Nonlinear Systems, 2nd ed., New Jersey: Prentice-Hall, 1996.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wang, Y., Ge, S.S. & Cheng, D. Observer and observer-based H ∞ control of generalized Hamiltonian systemscontrol of generalized Hamiltonian systems. Sci China Ser F 48, 211–224 (2005). https://doi.org/10.1360/03yf0601
Received:
Issue Date:
DOI: https://doi.org/10.1360/03yf0601