
Abstract
In this paper, we define a Halpern–Ishikawa type iterative method for approximating a fixed point of a Lipschitz pseudocontractive non-self mapping T in a real Hilbert space settings and prove strong convergence result of the iterative method to a fixed point of T under some mild conditions. We give a numerical example to support our results. Our results improve and generalize most of the results that have been proved for this important class of nonlinear mappings.
Similar content being viewed by others

1 Introduction
Let H be a real Hilbert space with norm \(\Vert \cdot \Vert \) and C be a nonempty subset of H. A mapping \(T:C\rightarrow H\) is said to be L-Lipschitz if there exists \(L \geq 0\) such that
T is said to be contraction if \(L\in [0,1)\) and is called nonexpansive mapping if \(L=1\). We observe that every contraction mapping is nonexpansive and every nonexpansive mapping is Lipschitz.
A mapping \(T:C\rightarrow H\) is said to be k-strictly pseudocontractive if there exists \(k\in [0,1)\) such that
We remark that every k-strictly pseudocontractive mapping is Lipschitz and hence the class of k-strictly pseudocontractive mappings includes properly the class of nonexpansive mappings.
An important class of mappings more general than the class of k-strictly pseudocontractive mappings is the class of pseudocontractive mappings. T is said to be pseudocontractive if
The class of pseudocontractive mappings is related to one of the important classes of operators known as monotone mappings. A mapping \(A:C\to {H}\) is said to be monotone if
Note that a mapping \(A:C\to {H}\) is monotone if and only if \(T:=I-A\) is pseudocontractive, where I is an identity mapping on C. Thus, the zeros of A are fixed points of T, that is, \(N(A):=\{x\in C: Ax=0\}=F(T):=\{x\in C:x= Tx\}\).
Several authors have studied iterative methods for approximating fixed points of nonexpansive, k-strictly pseudocontractive and pseudocontractive mappings (see, e.g., [3, 6, 15, 17, 22, 27, 28] and the references contained therein). In 1953, Mann [15] introduced the following scheme, which is refereed to as Mann iteration method:
where the initial guess \(x_{0}\in C\) is arbitrary and \(\{\alpha_{n}\} \subseteq [0,1]\) such that \(\lim_{n\to \infty }\alpha_{n}=0\) and \(\sum \alpha_{n}=\infty \). The Mann iteration method has been extensively investigated for approximating fixed points of nonexpansive mappings (see, e.g., [17]). In an infinite-dimensional Hilbert space, the Mann iteration method can provide only weak convergence (see, e.g., [7]). To obtain strong convergence, numerous authors have modified the Mann iterative method (see, e.g., [8, 10, 11]) in many ways.
In 1967, Halpern [8] studied the following recursive formula:
where \(\alpha_{n}\) is a sequence of numbers in \((0,1)\). He proved strong convergence of \(\{x_{n}\}\) to a fixed point of T, where \(\alpha _{n} := n^{-a}\), for \(a\in (0,1)\), in the framework of Hilbert spaces. Halpern’s scheme (5) has been studied extensively by many authors (see, e.g., [2, 12, 18, 21]). In particular, Reich [18] proved that the result of Halpern remains true in uniformly smooth Banach spaces (see also [19]).
In 1977, Lions [12] improved the result of Halpern, still in Hilbert spaces, by proving strong convergence of \(\{x_{n}\}\) to a fixed point of T, where the real sequence \(\{\alpha_{n}\}\) satisfies the following conditions:
In 2002, Xu [24] (see also [25]) improved the result of Lion in two directions. First, he weakened the condition (iii) by removing the square in the denominator so that we can choose the sequence \(\alpha_{n}=\frac{1}{n+1}\). Second, he proved the strong convergence of Halpern’s scheme (5) in the framework of real uniformly smooth Banach spaces.
For approximating fixed points of a Lipschitz pseudocontractive self-mapping T, Ishikawa [9] introduced the following process known as Ishikawa iteration:
where \(\{\alpha_{n}\}\), \(\{\beta_{n}\}\) are sequences of positive numbers satisfying the conditions:
-
(i)
\(0 \leq \alpha_{n}\leq \beta_{n}\leq 1\);
-
(ii)
\(\lim_{n\to \infty } \beta_{n} =0\);
-
(iii)
\(\sum \alpha_{n}\beta_{n}=\infty \).
He showed that the sequence \(\{x_{n}\}\) converges strongly to a fixed point of the mapping T, provided that C is a compact convex subset of a Hilbert space H. Several authors have extended the results of Ishikawa [9] to Banach spaces without compactness assumption on C (see, e.g., [13, 23]).
However, we observe that all the above results are valid only for self-mappings. For approximating fixed points of non-self mappings, several iterative schemes have been studied (see, e.g., [16, 20]) with the use of metric projection or sunny nonexpansive retraction mapping which are generally difficult to compute in practical applications.
In 2015, Colao and Marino [4] introduced a new searching strategy for the coefficient \(\alpha_{n}\) which makes the Mann algorithm well-defined for non-self mappings in the setting of a real Hilbert space H. In fact, they studied the following scheme:
where \(h(x):=\inf \{\lambda \geq 0: \lambda x+(1-\lambda )Tx \in C\}, \forall x\in C\subseteq H\) and T is a non-self mapping of C into H. Indeed, they obtained weak and strong convergence of the algorithm to a fixed point of nonexpansive non-self mappings under appropriate conditions.
Recently, Colao et al. [5] extended this result of Colao and Marino [4] to a class of k-strictly pseudocontractive mappings. We observe that these results (the results obtained in [4] and [5]) provide a way forward to avoid the use of metric projection or sunny nonexpansive mapping in constructing algorithms for approximating fixed points of a more general class of non-self mappings.
It is our purpose in this paper to construct and study a Halpern–Ishikawa type iterative scheme for non-self mappings in the setting of Hilbert spaces. As a result, we obtain strong convergence of the scheme to a fixed point of a Lipschitz pseudocontractive non-self mapping under some mild conditions. Our results extend and generalize many results in the literature.
2 Preliminaries
Let C be a nonempty subset of a Hilbert space H. A mapping \(T:C\to H\) is said to be inward if, for any \(x\in C\), we have
The set \(I_{C}(x)\) is called inward set of C at x. A mapping \(I -T\), where I is an identity mapping on C, is called demiclosed at zero if for any sequence \(\{x_{n}\}\) in C such that \(x_{n}\rightharpoonup x\) and \(Tx_{n}-x_{n}\to 0\) as \(n\to \infty \), then \(x=Tx\).
In what follows, we shall make use of the following lemmas.
Lemma 2.1
Let H be a real Hilbert space. Then, for any given \(x,y\in H\), the following inequality holds:
Lemma 2.2
([1])
Let C be a convex subset of a real Hilbert space H and let \(x\in H\). Then \(x_{0}=P_{C}x\) if and only if
Lemma 2.3
([24])
Let \(\{a_{n}\}\) be a sequence of nonnegative real numbers satisfying the following relation:
where \(\{\alpha_{n}\} \subset (0,1)\) and \(\{\delta_{n}\}\subset R\) satisfy the conditions \(\sum_{n=0}^{\infty } \alpha_{n}=\infty \) and \(\limsup_{n\to \infty }\delta_{n}\leq 0\). Then \(\lim_{n\to \infty }a_{n}=0\).
Lemma 2.4
([28])
Let C be a closed convex subset of a real Hilbert space H and \(T : C \to C \) be a continuous pseudo-contractive mapping. Then
-
(i)
\(F (T )\) is a closed convex subset of C;
-
(ii)
\(I -T\) is demiclosed at zero.
Lemma 2.5
([14])
Let \(\{a_{n}\}\) be sequence of real numbers such that there exists a subsequence \(\{n_{i}\}\) of \(\{n\}\) such that \(a_{n_{i}}< a_{{n_{i}}+1}\) for all \(i\in N\). Then there exists a nondecreasing sequence \(\{m_{k}\}\subset N\) such that \(m_{k}\to \infty \) and the following properties are satisfied by all (sufficiently large) numbers \(k\in N\):
In fact, \(m_{k}=\max \{j\leq k:a_{j}< a_{j+1}\}\).
Lemma 2.6
([26])
Let H be a real Hilbert space. Then, for all \(x,y\in H\) and \(\alpha \in [0,1]\), the following equality holds:
Lemma 2.7
([4])
Let C be a nonempty, closed and convex subset of a real Hilbert space H and \(T:C\to H\) be a mapping. Define \(h:C\to \mathbb{R}\) by
Then, for any \(x\in C\), the following hold:
-
(1)
\(h(x)\in [0,1]\) and \(h(x)=0\) if and only if \(Tx\in C\);
-
(2)
if \(\beta \in [h(x), 1]\), then \(\beta x +(1-\beta ) Tx \in C\);
-
(3)
if T is inward, then \(h(x)<1\);
-
(4)
if \(Tx \notin C\), then \(h(x)x +(1-h(x))Tx\in \partial C\).
3 Results and discussion
Now, let C be a nonempty, closed and convex subset of a real Hilbert space H and let \(T:C\rightarrow H\) be an inward L-Lipschitz mapping. Let \(\beta \in (1-\frac{1}{1+\sqrt{L^{2}+1}},1 )\) and \(\{\alpha_{n}\}\subseteq (0,1)\) such that \(\lim_{n\to \infty } \alpha_{n}=0\) and \(\sum \alpha_{n}=\infty \). We define a Halpern–Ishikawa type iterative scheme as follows.
Choose \(u,x_{0}\in C\). Let
Then by Lemma 2.7 it follows that \(y_{0}:=\lambda_{0} x_{0}+(1-\lambda_{0})Tx_{0}\in C\).
Let \(l(y_{0}):=\inf \lbrace \theta \geq 0: \theta x_{0} +(1-\theta )Ty _{0}\in C\rbrace \) and \(\theta_{0}\in [\max \{\lambda_{0},l(y_{0})\},1)\). Again by Lemma 2.7, \(\theta_{0} x_{0}+(1-\theta_{0})Ty_{0}\in C\), and hence it follows that
Thus, by mathematical induction, we have
where \(h(x_{n}):=\inf \{\lambda \geq 0: \lambda x_{n}+ (1-\lambda ) Tx _{n} \in C\}\) and \(l(y_{n}):=\inf \{\theta \geq 0: \theta x_{n}+ (1-\theta ) Ty_{n} \in C\}\).
Next, we prove the following theorem.
Theorem 3.1
Let C be a nonempty, closed and convex subset of a real Hilbert space H. Let \(T:C\to H\) be an L-Lipschitz pseudocontractive inward mapping with \(F(T)\neq\emptyset \). Let \(\{x_{n}\}\) be a sequence defined by (8). If there exists \(\epsilon >0\) such that \(\theta_{n}\leq 1-\epsilon\) \(\forall n\geq 0\), then \(\{x_{n}\}\) converges strongly to a fixed point of T nearest to u.
Proof
We make use of some ideas of the paper [27]. Let \(p\in F(T)\). Then from (8) and Lemma 2.6, we have
and hence from (3) we obtain
Moreover, from (8), Lemma 2.6, and (3), we have
Furthermore, (8) and Lemma 2.6 imply that
Substituting (10) and (11) into (9), we obtain
Then since, from the hypothesis, we have
and
inequality (12) implies that
Thus, by induction,
which provides that \(\{x_{n}\}\) and hence \(\{y_{n}\}\) are bounded.
Now, let \(x^{*}=P_{F(T)}(u)\). Then, using (8), Lemma 2.1, and following the methods used to get (12), we obtain
and
which implies that
Now, we consider two cases.
Case 1. Suppose that there exists \(n_{0}\in \mathbb{N}\) such that \(\{\Vert x_{n}-x^{*} \Vert \}\) is decreasing for all \(n\geq n_{0}\). Then it follows that \(\{\Vert x_{n}-x^{*} \Vert \}\) is convergent. Thus, from (16), (13), and (14), we have
Moreover, from (8) and (18), we obtain
and hence the Lipschitz continuity of T, (19), and (18) imply that
In addition, from (3.1) and (18), we obtain
Furthermore, since \(\{x_{n} \}\) is a bounded subset of H which is reflexive, we can choose a subsequence \(\{x_{n_{i}}\}\) of \(\{x_{n}\}\) such that
Then from (18) and Lemma 2.4, we have \(w\in F(T)\). Therefore, by Lemma 2.2, we immediately obtain
Then it follows from (17), (22), and Lemma 2.3 that \(\Vert x_{n}-x^{*} \Vert \to 0\) as \(n\to \infty \). Consequently, \(x_{n}\to x ^{*}=P_{F(T)}(u)\).
Case 2. Suppose that there exists a subsequence \(\{n_{i}\}\) of \(\{n\}\) such that
Then, by Lemma 2.5, there exists a nondecreasing sequence \(\{m_{k}\}\subset \mathbb{N}\) such that \(m_{k}\to \infty \) and
for all \(k\in N\). Now, from (16), (13), and (14), it follows that \(x_{m_{k}}-Tx_{m_{k}}\to 0\) as \(k\to \infty \). Thus, like in Case 1, we obtain
Now, from (17), we have
and hence (23) and (25) imply that
Thus, using (21), (24), and the fact that \(\alpha_{m _{k}}>0\), we obtain
This together with (25) implies that \(\Vert x_{{m_{k}}+1}-x^{*} \Vert \to 0\) as \(k\to \infty \). But, since \(\Vert x_{k}-x^{*} \Vert \leq \Vert x_{{m_{k}}+1}-x^{*} \Vert \), for all \(k\in \mathbb{N}\), it follows that \(x_{k}\to x^{*}=P_{F(T)}(u)\). Therefore, from the above two cases, we can conclude that \(\{x_{n}\}\) converges strongly to the fixed point of T nearest to u. □
If, in Theorem 3.1, we assume that T is k-strictly pseudocontractive, then T is Lipschitz pseudocontractive with \(L=\frac{1+k}{k}\), and hence we get the following corollary.
Corollary 3.2
Let C be a nonempty, closed and convex subset of a real Hilbert space H. Let \(T:C\to H\) be a k-strictly pseudocontractive inward mapping with \(F(T)\neq\emptyset \). Let \(\beta \in (1-\frac{k}{k+\sqrt{(k+1)^{2}+k ^{2}}},1 )\) and \(\{\alpha_{n}\}\subseteq (0,1)\) such that \(\lim_{n\to \infty } \alpha_{n}=0\) and \(\sum \alpha_{n}=\infty \). Let a sequence \(\{x_{n}\}\) be generated from arbitrary \(x_{0},u\in C\) by
where \(h(x_{n}):=\inf \{\lambda \geq 0: \lambda x_{n}+ (1-\lambda ) Tx _{n} \in C\}\) and \(l(y_{n}):=\inf \{\theta \geq 0: \theta x_{n}+ (1-\theta ) Ty_{n} \in C\}\).
If there exists \(\epsilon >0\) such that \(\theta_{n}\leq 1-\epsilon\) \(\forall n\geq 0\), then \(\{x_{n}\}\) converges strongly to a fixed point of T nearest to u.
If, in Theorem 3.1, we assume that T is nonexpansive, then we have that T is Lipschitz pseudocontractive with \(L=1\), and hence we get the following corollary.
Corollary 3.3
Let C be a nonempty, closed and convex subset of a real Hilbert space H, and let \(T:C\to H\) be a nonexpansive inward mapping with \(F(T)\neq\emptyset \). Let \(\beta \in (2-\sqrt{2},1)\) and \(\{\alpha_{n}\}\subseteq (0,1)\) such that \(\lim_{n\to \infty } \alpha_{n}=0\) and \(\sum \alpha_{n}=\infty \). Let a sequence \(\{x_{n}\}\) be generated from arbitrary \(x_{0},u\in C\) by
where \(h(x_{n}):=\inf \{\lambda \geq 0: \lambda x_{n}+ (1-\lambda ) Tx _{n} \in C\}\) and \(l(y_{n}):=\inf \{\theta \geq 0: \theta x_{n}+ (1-\theta ) Ty_{n} \in C\}\).
If there exists \(\epsilon >0\) such that \(\theta_{n}\leq 1-\epsilon \) \(\forall n\geq 0\), then \(\{x_{n}\}\) converges strongly to a fixed point of T nearest to u.
We now state and prove a convergence result for a monotone mapping.
Corollary 3.4
Let C be a nonempty, closed and convex subset of a real Hilbert space H. Let \(A:C\to H\) be an L-Lipschitz monotone inward mapping with \(N(A)\neq\emptyset \). Let \(\beta \in (1-\frac{1}{1+ \sqrt{1+(1+L)^{2}}},1 )\) and \(\{\alpha_{n}\} \subset (0,1)\) such that \(\lim_{n\to \infty } \alpha_{n}=0\) and \(\sum \alpha_{n}=\infty \). Let a sequence \(\{x_{n}\}\) be generated from arbitrary \(x_{0},u\in C\) by
where \(h(x_{n}):=\inf \{\lambda \geq 0: x_{n}-(1-\lambda )Ax_{n}\in C\}\) and \(l(y_{n}):=\inf \{\theta \geq 0: \theta x_{n}+ (1-\theta) (I-A)y_{n} \in C\}\).
If there exists \(\epsilon >0\) such that \(\theta_{n}\leq 1-\epsilon\) \(\forall n\geq 0\), then \(\{x_{n}\}\) converges strongly to the zero point of A nearest to u.
Proof
Let \(Tx:=(I-A)x\). Then T is a Lipschitz pseudocontractive mapping with Lipschitz constant \(L':=(1+L)\) and \(F(T)=N(A)\neq \emptyset \). Moreover, if A is replaced with \((I-T)\), then scheme (28) reduces to scheme (8), and hence the conclusion follows from Theorem 3.1. □
We observe that the method of proof of Theorem 3.1 provides the following result for approximating the minimum-norm point of fixed points of Lipschitz pseudocontractive non-self mappings.
Theorem 3.5
Let C be a nonempty, closed and convex subset of a real Hilbert space H containing 0, and let \(T:C\to H\) be an L-Lipschitz pseudocontractive inward mapping with \(F(T)\neq\emptyset \). Let \(\{x_{n}\}\) be a sequence defined by (8) with \(u=0\). If there exists \(\epsilon >0\) such that \(\theta_{n}\leq 1-\epsilon\) \(\forall n\geq 0\), then \(\{x_{n}\}\) converges strongly to the minimum-norm point \(x^{*}\) of \(F(T)\).
Remark 3.6
Note that, in the above results, the coefficients \(\lambda_{n}\) and \(\theta_{n}\) can be chosen simply as follows: \(\lambda_{n}=\max \{ \beta ,h(x_{n})\}\) and \(\theta_{n}=\max \{\lambda_{n},l(y_{n})\}\).
Remark 3.7
If, in all the above theorems and corollaries, the set \(F(T)\) is a subset of interior of C, then the assumption that there exists \(\epsilon >0\) such that \(\theta_{n}\leq 1-\epsilon \) \(\forall n\geq 0\) may not be required.
4 Numerical example
Now, we give an example of a nonlinear mapping which satisfies the conditions of Theorem 3.1.
Example 4.1
Let \(H=\mathbb{R}\) with Euclidean norm. Let \(C=[-1,1]\) and \(T:C\to \mathbb{R}\) be defined by
Then we observe that T satisfies the inward condition and \(F(T)=[0,1]\). One can also easily verify that
Thus, \(I-T\) is monotone and hence T is a pseudocontractive mapping. To show that T is a Lipschitz mapping, we consider the following cases.
Case 1: Let \(x,y \in [-1,0]\). Then we have
Case 2: Let \(x,y \in (0,1]\). Then we have
Case 3: Let \(x\in [-1,0]\) and \(y\in (0,1]\). Then we have
From the above cases, it follows that T is L-Lipschitz with \(L=3\).
Now, let \(\beta =\frac{5}{6}, u=\frac{1}{2}, x_{0}=-1\), and \(\alpha_{n}=\frac{2}{n+5}\). Then \(Tx_{0}=3\) and
Now, let \(\lambda_{0}=\frac{5}{6}\). Then \(y_{0}=\lambda_{0} x_{0}+(1- \lambda_{0})Tx_{0}=-\frac{1}{3}\) and \(Ty_{0}=1\), which gives
If we choose \(\theta_{0}=\frac{5}{6}\), then we have
Thus, \(Tx_{1}=\frac{3}{5}\), which implies that \(h(x_{1})=0\). Now, if we choose \(\lambda_{1}=\frac{5}{6}\), then we obtain
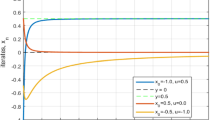
Again, we can choose \(\theta_{1}=\frac{5}{6}\), which yields \(x_{2}=0.0778\). In general, we observe that for \(u=0.5, x_{0}=-1\) and \(\alpha_{n}=\frac{2}{n+5}\), we can choose \(\lambda_{n}=\theta_{n}= \frac{5}{6}\). Thus, all the conditions of Theorem 3.1 are satisfied and \(x_{n}\) converges to \(0.5=P_{F(T)}u\) (see Fig. 1).

Convergence of \(x_{n}\) with different values of \(x_{0}\) and u
On the other hand, for \(u=-0.8, x_{0}=1\), and \(\alpha_{n}= \frac{2}{n+5}\), we obtain that \(x_{n}\) converges to \(0.0=P_{F(T)}u\). Figure 1 is obtained using MATLAB version 7.5.0.342(R2007b).
5 Conclusion
In this paper, we have constructed and studied a Halpern–Ishikawa type iterative scheme for non-self mappings in the setting of Hilbert spaces. As a result, we obtained strong convergence of the scheme to a fixed point of a Lipschitz pseudocontractive non-self mapping under some mild conditions. In addition, we provided a numerical example to support our results. Our study can open the door for further research activity in the field for a more general class of mappings in Hilbert and/or Banach spaces more general than Hilbert spaces. Our results extend and generalize many results in the literature. More particularly, Theorem 3.1 extends Theorem 8 of Colao et al. [5] in the sense that it provides a convergent scheme for approximating fixed points of Lipschitz pseudocontractive non-self mappings more general than that of k-strictly pseudocontractive non-self mappings.
References
Alber, Y.: Metric and generalized projection operators in Banach spaces: properties and applications. In: Kartsatos, A.G. (ed.) Theory and Applications of Nonlinear Operators of Accretive and Monotone Type. Lecture Notes in Pure and Appl. Math., vol. 178, pp. 15–50. Dekker, New York (1996)
Chidume, C.E., Chidume, C.O.: Iterative approximation of fixed points of nonexpansive mappings. J. Math. Anal. Appl. 318(1), 288–295 (2006)
Chidume, C.E., Zegeye, H.: Approximate fixed point sequences and convergence theorems for Lipschitz pseudocontractive maps. Proc. Am. Math. Soc. 132, 831–840 (2004)
Colao, V., Marino, G.: Krasnoselskii–Mann method for non-self mappings. Fixed Point Theory Appl. 2015, Article ID 39 (2015). https://doi.org/10.1186/s13663-015-0287-4
Colao, V., Marino, G., Hussain, N.: On the approximation of fixed points of non-self strict pseudocontractions. Rev. R. Acad. Cienc. Exactas Fís. Nat. Madr. 111(1), 159–165 (2017). https://doi.org/10.1007/s13398-016-0283-5
Daman, O.A., Zegeye, Z.: Strong convergence theorems for a common fixed point of a finite family of pseudocontractive mappings. Int. J. Math. Math. Sci. 2012, Article ID 405315 (2012)
Genel, A., Lindenstrauss, J.: An example concerning fixed points. Isr. J. Math. 22, 81–86 (1975)
Halpern, B.: Fixed points of nonexpansive maps. Bull. Am. Math. Soc. 73, 957–961 (1967)
Ishikawa, S.: Fixed points by a new iteration method. Proc. Am. Math. Soc. 44, 147–150 (1974)
Kim, T.H., Xu, H.K.: Strong convergence of modified Mann iterations. Nonlinear Anal. 61, 51–60 (2005)
Kim, T.H., Xu, H.K.: Strong convergence of modified Mann iterations for asymptotically nonexpansive mappings and semigroups. Nonlinear Anal. 64, 1140–1152 (2006)
Lions, P.L.: Approximation de points fixes de contractions. C. R. Acad. Sci., Ser. A–B Paris 284, 1357–1359 (1977)
Liu, Q.: A convergence theorem of the sequence of Ishikawa iterates for quasi-contractive mappings. J. Math. Anal. Appl. 146, 301–305 (1990)
Mainge, P.E.: Strong convergence of projected subgradient methods for nonsmooth and non-strictly convex minimization. Set-Valued Anal. 16, 899–912 (2008)
Mann, W.R.: Mean value methods in iteration. Proc. Am. Math. Soc. 4, 506–510 (1953)
Matsushita, S., Takahashi, W.: Strong convergence theorems for nonexpansive non-self mappings without boundary conditions. Nonlinear Anal. 68, 412–419 (2008)
Reich, S.: Weak convergence theorems for nonexpansive mappings in Banach spaces. J. Math. Anal. Appl. 67(2), 274–276 (1979)
Reich, S.: Strong convergence theorems for resolvents of accretive operators in Banach spaces. J. Math. Anal. Appl. 75, 287–292 (1980)
Reich, S.: Approximating fixed points of nonexpansive mappings. Panam. Math. J. 4(2), 23–28 (1994)
Song, Y., Chen, R.: Viscosity approximation methods for nonexpansive nonself-mappings. J. Math. Anal. Appl. 321(1), 316–326 (2006)
Takahashi, T., Takahashi, W.: Strong convergence theorem for a generalized equilibrium problem and nonexpansive mapping in a Hilbert space. Nonlinear Anal. 69, 1025–1033 (2008)
Tufa, A.R., Zegeye, H.: Convergence theorems for Lipschitz pseudocontractive non-self mappings in Banach spaces. J. Nonlinear Anal. Optim. 6(2), 1–17 (2015)
Xu, H.K.: A note on the Ishikawa iteration scheme. J. Math. Anal. Appl. 167, 582–587 (1992)
Xu, H.K.: Another control condition in an iterative method for nonexpansive mappings. Bull. Aust. Math. Soc. 65, 109–113 (2002)
Xu, H.K.: Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 66(2), 240–256 (2002)
Zegeye, H., Shahzad, N.: Convergence of Mann’s type iteration method for generalized asymptotically nonexpansive mappings. Comput. Math. Appl. 62, 4007–4014 (2011)
Zegeye, H., Shahzad, N.: An algorithm for a common fixed point of a family of pseudocontractive mappings. Fixed Point Theory Appl. 2013, Article ID 234 (2013). https://doi.org/10.1186/1687-1812-2013-234
Zhang, Q.B., Cheng, C.Z.: Strong convergence theorem for a family of Lipschitz pseudocontractive mappings in a Hilbert space. Math. Comput. Model. 48, 480–485 (2008)
Acknowledgements
The authors appreciate the support of their institutes.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Funding
The second author is supported by the International Mathematical Union (IMU) Breakout Graduate Fellowship Program through The World Academy of Sciences (TWAS).
Author information
Authors and Affiliations
Contributions
The authors contributed equally and significantly in writing the article. Both authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Abbreviations
Not applicable.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Zegeye, H., Tufa, A.R. Halpern–Ishikawa type iterative method for approximating fixed points of non-self pseudocontractive mappings. Fixed Point Theory Appl 2018, 15 (2018). https://doi.org/10.1186/s13663-018-0640-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13663-018-0640-5