
Abstract
This paper provides a numerical approach for solving the time-fractional Fokker–Planck equation (FFPE). The authors use the shifted Chebyshev collocation method and the finite difference method (FDM) to present the fractional Fokker–Planck equation into systems of nonlinear equations; the Newton–Raphson method is used to produce approximate results for the nonlinear systems. The results obtained from the FFPE demonstrate the simplicity and efficiency of the proposed method.
Similar content being viewed by others

1 Introduction
Applications of fractional differential equation (FDE) in science and engineering are becoming vibrant, particularly in the fields of physics, finance, viscoelasticity, chemistry, and fluid mechanics. For this reason many authors are attracted to knowing the properties of FDEs (for details, see [2, 13, 15, 16, 18–20, 24, 25, 28]) and vast applications in modeling and engineering fields [1, 6, 11, 12]. Also see the literature [3, 5, 21, 23] for further applications of FDE in different disciplines.
The Fokker–Planck equation (FPE) was studied for the first time by Risken [22]. In addition, several researchers [4, 17] have worked on fractional Fokker–Planck equations among mathematical models developed in physical and biological sciences. It results from a diffusion estimation of certain stochastic processes that have been re-enacted as Markovian and continuous. It is a generalized diffusion equation that governs the evolution of the probability density in time. In most cases, fractional differential equations (FDEs) cannot be solved using the exact methods [8–10], that is why the recent research has used the properties of shifted Chebyshev polynomials [14, 27] and the finite difference method (FDM) to simplify the fractional initial value problem (IVP) to a set of nonlinear equations. In this paper, we are limited to the computational solution for the two-variable time-fractional Fokker–Planck equation [17] as follows:
where \(u= u(x, t), \alpha \) is a parameter that defines the fractional derivative order (\(0<\alpha \le 1\)). \(A_{i} (x, t, u)\) and \(B_{i} (x, t, u)\) are arbitrary constants and n is an integer such that \(n\ne 0\).
In recent decades, Chebyshev polynomials have been among the most useful approximations because of their suitability for solving complex problems in science and engineering that can be expressed in integral equations, ordinary differential equations, and partial differential equations in integer and fractional orders. In this article, we use the fourth-kind Chebyshev polynomials with some important properties and their analytical form. Here, the approximate solution of FFPE is computed with the help of the shifted Chebyshev collocation method and the finite difference scheme. The shifted Chebyshev collocation method is used to reduce FFPE into systems of nonlinear differential equations, while FDM can be used for rewriting these systems into systems of nonlinear equations, and hence the Newton–Raphson method is used to arrive at the required approximate solution.
The organization of the paper is as follows. In Sect. 2, we provide the basic properties of Chebyshev polynomials of the fourth kind. In Sect. 3, the shifted Chebyshev collocation method and the finite difference method (FDM) are implemented to solve the fractional Fokker–Planck equation. In Sect. 4, conclusions are provided.
2 Preliminaries
This section discusses mathematical description, fractional derivative notation, and some essential properties for the fourth-kind Chebyshev polynomials.
Definition 2.1
In the Caputo sense the fractional derivative of \(f(z)\) is defined as in [19]:
where \(z>0\), \(m\in \mathbb{C}\), and \(m-1<\alpha <m\).
The sequential property of the Caputo fractional derivative emerges analogous to the integer order differentiation
For the Caputo fractional derivative, we have
the notation \(\lceil \alpha \rceil \) is used in the sense of a ceiling function which gives an integer smaller than or equal to α.
We recall from Mason and Handscomb [14] that the fourth-kind Chebyshev polynomials \(W_{n} (t)\) are orthogonal degree polynomials of n in t based on \([-1, 1]\). Hence, for \(t=\cos \theta \) and \(\theta \in [0, \pi ]\),
and it can be extracted from the special case \(\beta =-\alpha =\frac{1}{2} \) of the Jacobi polynomial \(P_{n}^{(\alpha , \beta )} (t)\) explicitly:
where
and \(W_{n} (t)\) is the orthogonal polynomial on \([-1, 1]\) w.r.t. the inner product as follows:
where \(W_{n} (t)\) has a weight function \(\sqrt{\frac{1-t}{1+t} } \).
The Chebyshev polynomials of the fourth kind \(W_{n} (t)\) can be generated using the recurrence relation
starting with the values \(W_{0} (t)=1\), \(W_{1} (t)=2t+1\), \(W_{2} (t)=4t^{2} +2t-1\).
The analytical form of the fourth-kind Chebyshev polynomial \(W_{n} (t)\) of degree n can be expressed using (2.6) and the properties of Jacobi polynomial in the following form:
Further, we can define the polynomial of Chebyshev in any finite range of \([a, b]\), but here it is more convincing to use \([0, 1]\) than \([-1, 1]\) to map the independent variable \(t \in [0, 1]\) to the variable \(s\in [-1, 1]\) by the linear transformation \(t=\frac{s (b-a )+(a+b)}{2} \). However, in this paper, we are only concerned with the fourth-kind shifted Chebyshev polynomial of degree n symbolized by \(W_{n}^{*} (t)\):
These shifted polynomials of the fourth kind are orthogonal at the support interval \([0, 1]\) under the inner product shown as follows:
On the right-hand side of (2.12), \(\sqrt{\frac{1-t}{t} } \) is the weight function of \(W_{n}^{*} (t)\) and is normalized by \(W_{n}^{*} (1)=1\). The fourth-kind shifted Chebyshev polynomial is obtained by means of a recurrence connection:
starting with the values \(W_{0}^{*} (t)=1\), \(W_{1}^{*} (t)=4t-1\), \(W_{2}^{*} (t)=16t^{2} -12t+1\). The possible expression of the analytic form for the fourth-kind shifted Chebyshev polynomials \(W_{n}^{*} (t)\) of degree n is shown as follows:
In a spectral method, it is possible to expand \(g(t)\), the square integrable function, in \([0, 1]\) and define it by an infinite \(W_{n}^{*} (t)\) expansion as follows:
where \(c_{i} \) are constants. Now, we can estimate a number of the coefficients \(c_{i} \), and then \(g(t)\) can be approximated by a finite sum of terms \((m+1)\) such as
where the coefficients \(c_{i}\) (\(i=0, 1, 2,\ldots,m\)) are given by
or
3 Main results
The approximate formula for the function \(g_{m} (t)\) given in (2.16) is presented in the following theorem.
Theorem 3.1
Let\(g_{m} (t)\)be an approximate function in terms of the fourth-kind shifted Chebyshev polynomials given by (2.16). Suppose that\(\alpha >0\), we get
where
Proof
Using the definition of approximated function \(g_{m}(t)\) given in (2.16) and the Caputo fractional differentiation properties given in (2.2), we obtain
Applying equations (2.3) and (2.4), we get
4 Numerical examples
In this section, we present numerical examples to show the efficacy and validity of the proposed method and to compare it with the existing method.
Example 4.1
Let us consider the time-fractional Fokker–Planck equation
with the initial condition
The exact solution to equation (4.1) for the non-fractional case at \(\alpha =1\) is \(u(x, t)=x+t\).
In order to use the shifted Chebyshev polynomials of the fourth kind, we approximate \(u(x, t)\) with \(m=3\):
From [26], we have
where
Now, we have
Substituting (4.4), (4.5), and (4.6) into (4.1), we get
For suitable collocation points \(t_{p} \), we use the roots of shifted Chebyshev polynomials of the fourth kind \(W_{m+1- \lceil \alpha \rceil }^{*} (t)\), \(p=0, 1, 2,\ldots, m- \lceil \alpha \rceil \). For non-fractional case \(\alpha =1\) and \(m=3\), we have \(W_{3}^{*} (t_{p} )=0\), \(p=0, 1, 2\). The roots of \(64t^{3}_{p} -80t^{2}_{p} +24t_{p} -1=0\) are \(t_{0} =0.04952\), \(t_{1} =0.38874\), \(t_{2} =0.81174\).
From (4.7) and the Chebyshev collocation method, we have
By the property of shifted Chebyshev polynomials of the fourth kind with \(W_{0}^{*} (t_{p} )=1\), we obtain a nonlinear system of differential equations:
where
Using the finite difference method to solve the systems of ordinary differentials (4.10)–(4.12), we use the notations \(T=T_{\mathrm{final}}\), \(0< t_{j} \le T\), \(t_{j} =j\Delta t\)\(\Delta t=\frac{T}{N}\), \(j=1, 2,\ldots ,N \). System (4.10)–(4.12) is discretized and takes the following form:
Rearranging (4.13)–(4.16) and applying the Newton–Raphson method, we arrive at the required solution for the problem on (4.1).
Graphs and Table: In Fig. 1, the numerical solutions attained for Example 4.1 using the shifted Chebyshev collocation method are presented and are compared with the previous method [7] and with the exact solution as well. And it is easy to observe, the proposed method has an excellent agreement with the exact solution.

Comparison between the exact solution and the approximate solution of Example 4.1 for different values of α
Table 1 presents the numerical results of Example 4.1 at various levels of value of α. The results obtained by our method with \(\alpha =0.2\), \(\alpha =0.4\), \(\alpha =0.6\), and \(\alpha =0.8\) are given in the 3rd, 5th, 7th, and 9th columns, respectively. To validate the accuracy of the proposed method, the numerical solution is compared with the previous findings provided in Habenom et al. [7] and the exact solutions, which shows that the present method is in good agreement with the exact solution. The findings in Table 1 demonstrate that the accuracy of the method presented is better than that of other methods. In comparison, the computing expense (CPU time) of the suggested approach tends to be lower than in other approaches, since we require just a few terms to find an answer with high accuracy. We provide a comparative study of two methods (TSM = Taylor series method (see [7]); CPFK = Chebyshev polynomial of the fourth kind (present method)) in the numerical form as follows.
Example 4.2
Consider the time-fractional Fokker–Planck equation (FFPE) \(f(x)=1+x\), \(x\in \mathbb{R}\). Let in equation (1.1) \(n=1\), \(x_{1} =x\), \(A_{1} (x, t)=-(1+x)\), \(B_{1} (x, t)=e^{t} x^{2} \) in the form
with the initial condition
The exact solution of equation (4.17) is \(u(x,t)=(x+1) e^{t}\).
To use the shifted fourth-type Chebyshev polynomials, we approximate \(u(x, t)\) with \(m=5\) on (2.16) as follows:
From the above theorem, we have
Putting (4.20), (4.21), and (4.22) into (4.17), we obtain
For suitable collocation points \(t_{p} \), we use the roots of shifted Chebyshev polynomials of the fourth kind \(W_{m+1- \lceil \alpha \rceil }^{*} (t)\), \(p=0, 1, 2,\ldots, m- \lceil \alpha \rceil \). For fractional α with \(m=5\), we have
The roots of polynomial (4.25) are
From (4.23) and the Chebyshev collocation method, we get
Of the property of the fourth-kind shifted Chebyshev polynomials, \(W_{0}^{*} (t_{p} )=1\). Equation (4.26) will lead us to a nonlinear system of ODE given below.
From the initial condition (IC) given at (4.18), we have
where
Applying the concept of finite difference method (FDM) to the system of nonlinear ODEs (4.27)–(4.32), considering that \(T=T_{\mathrm{final}}\), \(0< t_{j} \le T\), \(t_{j} =j\Delta t\)\(\Delta t=\frac{T}{N} \), \(j=1, 2, \ldots,N\),
Using the points \(t_{0}\), \(t_{1}\), \(t_{2}\) obtained from the roots of (4.25) and collecting like terms of (4.33)–(4.38), we arrive at the following matrix form:
where
where \(\Im =e^{t} x^{2} +(1+x)\Delta t\).
where
Solving the above system with the help of Newton–Raphson method, using the initial approximations \(U_{i}^{0}\) and \(U_{i}^{1} \) at \(n=1\) from the initial condition given on (4.18) yields the numerical solution of the fractional Fokker–Planck equation (4.17). For \(m=3\), and the Chebyshev collocation method and FDM on (4.17), we obtain the following nonlinear system of ordinary differential equations:
where
For \(m=4\), and the Chebyshev collocation method and FDM on (4.17), we obtain the following nonlinear system of ordinary differential equations:
where
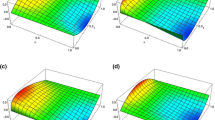
Graphs and Table: The graphical depictions in Fig. 2 show the exact solution and an approximate solution obtained through the shifted Chebyshev spectral method of FFPE on Example 4.2. Also, the absolute error of the present method for \(m=3,4\), and 5 is displayed in Table 2. As it is expected, accuracy of the method increases, i.e., the absolute error gets very small upon increasing the value of m, since the proposed method is based on the idea of infinite series.

Comparison between the exact solution and the approximate solution of Example 4.2 for different values of α
5 Conclusion
In this paper, to solve a Fokker–Planck time-fractional equation, the Chebyshev collocation method and the finite difference method are applied. Using the properties of the shifted Chebyshev fourth-kind polynomials, we reduce the time-fractional Fokker–Planck equation to the system of differential equations. Also, using FDM we reduce such systems of DEs into nonlinear equations where the Newton–Raphson method can be used to solve them. As it can be observed from the tabulated values and graphical solutions in Sect. 3, the behavior of numerical solution for different values of α is presented, which shows that the proposed method is dominant over the previous study in [7] taking the exact solutions as reference values. From this we conclude that the shifted Chebyshev polynomial of the fourth kind gives us better approximation, and we recommend other scholars in this area to increase the accuracy of such methods even more than this by taking a large value of the series (2.16).
The advantage of the methods is that the approximation requires only few terms of fourth-kind Chebyshev polynomials. Also, we compared the present method with the method in [7] to show that the present method demonstrated the effectiveness and high accuracy. All the numerical results were obtained with the help of MATLAB 2018a.
References
Alaria, A., Khan, A.M., Suthar, D.L., Kumar, D.: Application of fractional operators in modelling for charge carrier transport in amorphous semiconductor with multiple trapping. Int. J. Appl. Comput. Math. 5(6), 167 (2019). https://doi.org/10.1007/s40819-019-0750-8
Alshabanat, A., Jleli, M., Kumar, S., Samet, B.: Generalization of Caputo–Fabrizio fractional derivative and applications to electrical circuits. Front. Phys. (2020). https://doi.org/10.3389/fphy.2020.00064
Bhrawy, A.H., Baleanu, D., Mallawi, F.: A new numerical technique for solving fractional sub-diffusion and reaction sub-diffusion equations with non-linear source term. Therm. Sci. 19, 25–34 (2015)
Dolgov, S.V., Khoromskij, B.N., Oseledets, I.: Fast solution of multi-dimensional parabolic problems in the TT/QTT formats with initial application to the Fokker–Planck equation. SIAM J. Sci. Comput. 34, A3026–A3038 (2012)
Doungmo, G., Emile, F., Kumar, S., Mugisha, S.B.: Similarities in a fifth-order evolution equation with and with no singular kernel. Chaos Solitons Fractals 130, 109467 (2020). https://doi.org/10.1016/j.chaos.2019.109467
Ghanbaria, B., Kumar, S., Kumar, R.: A study of behaviour for immune and tumor cells in immunogenetic tumour model with non-singular fractional derivative. Chaos Solitons Fractals 133, 109619 (2020). https://doi.org/10.1016/j.chaos.2020.109619
Habenom, H., Suthar, D.L., Aychluh, M.: Solution of fractional Fokker Planck equation using fractional power series method. J. Sci. Arts 48(3), 593–600 (2019)
Khader, M.M.: Numerical treatment for solving the perturbed fractional PDEs using hybrid techniques. J. Comput. Phys. 250, 565–573 (2013)
Khader, M.M., Megahed, A.M.: Approximate solutions for the flow and heat transfer due to a stretching sheet embedded in a porous medium with variable thickness, variable thermal conductivity and thermal radiation using Laguerre collocation method. Appl. Appl. Math. 10(2), 817–834 (2015)
Khader, M.M., Sweilam, N.H., Mahdy, A.M.S.: Numerical study for the fractional differential equations generated by optimization problem using Chebyshev collocation method and FDM. Appl. Math. Inf. Sci. 7(5), 2011–2018 (2013)
Kumar, S., Ahmadian, A., Kumar, R., Kumar, D., Singh, J., Baleanu, D., Salimi, M.: An efficient numerical method for fractional SIR epidemic model of infectious disease by using Bernstein wavelets. Mathematics 8, 558 (2020). https://doi.org/10.3390/math8040558
Kumar, S., Kumar, R., Agarwal, R.P., Samet, B.: A study on population dynamics of two interacting species by Haar wavelet and Adam’s–Bashforth–Moulton methods. Math. Methods Appl. Sci. (2020). https://doi.org/10.1002/mma.6297
Kumar, S., Kumar, R., Cattani, C., Samet, B.: Chaotic behaviour of fractional predator–prey dynamical system. Chaos Solitons Fractals 135, 109811 (2020). https://doi.org/10.1016/j.chaos.2020.109811
Mason, J.C., Handscomb, D.C.: Chebyshev Polynomials. Chapman & Hall/CRC, Boca Raton (2003)
Meerschaert, M.M., Tadjeran, C.: Finite difference approximations for two-sided space-fractional partial differential equations. Appl. Numer. Math. 56(1), 80–90 (2006)
Mistry, L., Khan, A.M., Suthar, D.L., Kumar, D.: A new numerical method to solve non-linear fractional differential equations. Int. J. Innov. Technol. Explor. Eng. 8(12), 1–6 (2019)
Mohamed, A.S., Mahdy, A.M.S., Mtawa, A.H.: Approximate analytical solution to a time-fractional Fokker–Planck equation. Bothalia 45(4), 57–69 (2015)
Nagy, A.M., Sweilam, N.H.: An efficient method for solving fractional Hodgkin–Huxley model. Phys. Lett. 378, 1980–1984 (2014)
Podlubny, I.: Fractional Differential Equations. An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications. Mathematics in Science and Engineering, vol. 198. Academic Press, San Diego (1999)
Ramani, P., Khan, A.M., Suthar, D.L.: Revisiting analytical-approximate solution of time fractional Rosenau–Hyman equation via fractional reduced differential transform method. Int. J.: Emerg. Technol. Learn. 10(2), 403–409 (2019)
Ramani, P., Khan, A.M., Suthar, D.L.: Generalized differential transform method and its application to solve nonlinear partial differential equations with space and time fractional derivatives. Int. J. Sci. Res. Rev. 7(2), 1–9 (2019)
Risken, H.: The Fokker–Planck Equation. Methods of Solution and Applications, 2nd edn. Springer Series in Synergetics, vol. 18. Springer, Berlin (1989)
Saravanan, A., Magesh, N.: An efficient computational technique for solving the Fokker–Planck equation with space and time fractional derivatives. J. King Saud Univ., Sci. 28, 160–166 (2016)
Sweilam, N.H., Khader, M.M., Al-Bar, R.F.: Numerical studies for a multi-order fractional differential equation. Phys. Lett. A 371, 26–33 (2007)
Sweilam, N.H., Khader, M.M., Al-Bar, R.F.: Homotopy perturbation method for linear and nonlinear system of fractional integro-differential equations. Int. J. Comput. Math. Numer. Simul. 1(1), 73–87 (2008)
Sweilam, N.H., Nagy, A.M., El-Sayed, A.: On the numerical solution of space fractional order diffusion equation via shifted Chebyshev polynomials of the third kind. J. King Saud Univ., Sci. 28, 41–47 (2016)
Tadjeran, C., Meerschaert, M., Scheffler, H.P.: A second-order accurate numerical approximation for the fractional diffusion equation. J. Comput. Phys. 213, 205–213 (2006)
Veeresha, P., Prakasha, D.G., Kumar, S.: A fractional model for propagation of classical optical solitons by using nonsingular derivative. Math. Methods Appl. Sci. (2020). https://doi.org/10.1002/mma.6335
Acknowledgements
The authors are very thankful to the reviewers for valuable comments and suggestions to improve the paper.
Availability of data and materials
Not applicable.
Funding
Not available.
Author information
Authors and Affiliations
Contributions
The authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Habenom, H., Suthar, D.L. Numerical solution for the time-fractional Fokker–Planck equation via shifted Chebyshev polynomials of the fourth kind. Adv Differ Equ 2020, 315 (2020). https://doi.org/10.1186/s13662-020-02779-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-020-02779-7