
Abstract
In this paper, a discrete-time host–parasitoid model with Hassell growth function for the host is considered. The sufficient conditions for the existence of the equilibrium points are obtained and a local stability analysis of the model is performed. By using the bifurcation theory it is shown that the system undergoes a Neimark–Sacker bifurcation. In addition, bifurcation diagrams and phase portraits of the model are given.
Similar content being viewed by others


1 Introduction
Discrete models have been applied most readily to groups such as an insect population where there is a rather natural division of time into discrete generations. A model which has received considerable attention from experimental and theoretical biologists is the host–parasitoid system [1]. In mathematical biology, the host–parasitoid interactions are very popular subjects since they are important to address the natural enemy of an insect pest. Parasitoids are insect species of which larvae develop as parasites on other insect species. Parasitoid larvae usually kill their host (sometimes the host is paralyzed by the ovipositing parasitoid female) whereas adult parasitoids are free-living insects. Parasitoids and their hosts often have synchronized life-cycles, e.g., both have one generation per year (monovoltinous).
Generally, the general form of the discrete model used to describe host–parasitoid interactions is [2–4]
where \(H_{t}\) and \(P_{t}\) are the population densities of hosts and parasitoids at time t, respectively. The functions F and G give the details of the host–parasitoid interactions. Many authors have investigated various models considering different functions derived from biological facts. The simplest version of the host–parasitoid interactions is the Nicholson–Bailey model given as follows [5]:
where the parameters \(\lambda>0\) and \(e>0\) are the intrinsic rate of the natural increase of hosts and the number of parasitoids which develop from one parasitized host, respectively. The parameter \(k>0\) is the per capita searching efficiency of parasitoids. Nicholson and Bailey developed this model in 1935 and applied it to the parasitoid, Encarsia formosa, and the host, Trialeurodes vaporariorum [6].
The following model with a density-dependent host–parasitoid model which is a generalized version of the Nicholson–Bailey model was proposed by Beddington et al. [7]:
where the new parameter \(m>0\) is the intensity of intra-specific competition in host population. Beddington et al. [7] showed that the inclusion of the host density dependence stabilizes the Nicholson–Bailey model. Sebastian et al. [8] considered model (3) with logistic growth function as follows:
They analyzed the stability of the model with and without Allee effect. We refer the reader to [9–12] and the references cited therein about the Allee effect.
In this paper, we consider model (3) with the Hassell growth function [13, 14] for the host and obtain
where the parameter R is the intrinsic growth rate, a is a scaling parameter affecting the equilibrium population size, and b incorporates density-dependent effects such as intra-specific competition. Hassell et al. [13] collected R and b values for about two dozen species from field and laboratory observations and noted that the majority of these cases were within the stable region [15]. In this work, we give conditions for the existence of the equilibrium points of the model (5) and discuss the linear stability of these equilibrium points. By using the bifurcation theory we obtain sufficient conditions for the direction and existence of the Neimark–Sacker bifurcation. All theoretical results obtained are supported with numerical simulations. The bifurcation diagrams and phase portraits are given.
Notice that if \(m=0\) and \(a=1\) then the model (5) turns into following the model which is studied by [16]:
In [16], the authors obtained the conditions for the existence of the equilibrium points and analyzed the equilibrium points \((0,0)\) and \(H^{\ast}\neq0\), \(P^{\ast}=0\) of the model (6). However, stability conditions of the coexistence equilibrium point were not given theoretically and the authors did not have an interest in bifurcation analysis. In Sect. 3.1, we show that the model which is studied by [16] undergoes a Neimark–Sacker bifurcation. For this model, we obtain the bifurcation diagrams and phase portraits, too.
2 Equilibrium points and stability analysis of the model (3)
In this section, we will give conditions for existence of equilibrium points of the model (5) and discuss the local stability conditions of these equilibrium points.
Theorem 2.1
For the system (5), the following statements hold true.
-
(a)
There exists an extinction equilibrium point \(( 0,0 )\).
-
(b)
If \(R\geq1\), then there exist two equilibrium points as \(( 0,0 ) \) and \(( H_{1}^{\ast},0 )\).
-
(c)
If \(0<\frac{ (1+aH^{\ast} )^{b}}{R}e^{mH^{\ast}}<1\) then there exists an equilibrium point \(( H^{\ast},P^{\ast} )\).
Proof
(a) To find equilibrium points \(( H^{\ast},P^{\ast} ) \) of the model (5), we write \(H_{t}=H_{t+1}=H^{\ast}, P_{t}=P_{t+1}=P^{\ast}\) in Eq. (5) and obtain
It is clear that, for \(H^{\ast}=0\), we have equilibrium point \(( 0,0 ) \) for any values of parameters.
(b) Let us assume \(H_{1}^{\ast}\neq0\) and \(P_{1}^{\ast}=0\). Then, by using the first equation of (5), we obtain
Let us denote \(f(x)=(1+ax)^{b}e^{mx}\). If the graph of f intersects the horizontal line \(w=R\), we take equilibrium points. Notice that f is a continuous function, \(f(0)=1\), \(f^{{\prime}}(x)>0\), \(\lim_{x\rightarrow \infty}f(x)=\infty\) and when \(R\geq1\), there is a unique intersection point. In Fig. 1, we give the graphs equation (8) with some values of the parameters.

Graphs of \(z=f(x)\) and \(w=R\) functions such that \(a=1\), \(b=2\), \(m=0.3\) and \(R=1.5\)
(c) We investigate the positive equilibrium point for \(H^{\ast}\neq 0 \) and \(P^{\ast}\neq0\). By using the first equation of (5), we have
or
If we take \(0<(\frac{ ( 1+aH^{\ast} ) ^{b}}{R}e^{mH^{\ast}})<1\), then \(P^{\ast}\) is positive. Now, we can write (9) in the second equation of (5) as
If Eq. (11) is written in the first of Eq. (5), we obtain
Let us take \(H^{\ast}=x\). We denote the right side of Eq. (12) as follows:
When the graph of the F intersects the horizontal line \(z=R\), we can obtain some equilibrium points. By solving \(F^{\prime}(x)=0\), we obtain the following equation:
The function on the right-hand side is monotonically increasing without bounding for \(x>0\), the function on the left-hand side is monotonically decreasing and converges to 0 as \(x\rightarrow \infty\). Thus there is a unique intersection point which means there exists only one critical point (Fig. 2(a)).

(a) The intersection point is the point where \(F'(x)=0\). (b) Graph of \(z=F(x)\) function such \(a=0.1,b=0.8,k=0.7\) and \(m=0.8\)
Since \(F(0)=1,F^{{\prime}}(0)>0\), \(F(x)\longrightarrow0\) as \(x\rightarrow \infty\), the critical point is a local maximum (Fig. 2(b)). □
To determine stability conditions of the discrete system, we can use the following lemma comprising what are called the Schur–Cohn criteria.
Lemma 2.2
([17])
The characteristic polynomial, \(p(\lambda)=\lambda^{2}+p_{1}\lambda+p_{0}\) has all its roots inside the unit open disk if and only if
Theorem 2.3
For the model (5), the following statements hold true.
-
(a)
If \(|R|<1\), equilibrium point \((0,0)\) is locally asymptotically stable.
-
(b)
If \(\vert -e^{-mH_{1}^{\ast}}v^{-1-b}R(-v+aH_{1}^{\ast }b+H_{1}^{\ast}mv) \vert <1\) and \(H_{1}^{\ast}<\frac{1}{k}\) then equilibrium point \((H_{1}^{\ast},0)\) is locally asymptotically stable.
-
(c)
Suppose that \(-v+abH^{\ast}+H^{\ast}mv>0\), \(2v-abH^{\ast}+H^{\ast }kv-H^{\ast}mv>0\) and \(-1+bH^{\ast}k>0\). Assume that
$$\begin{aligned} &R_{1}=\frac{e^{H^{\ast}m}v^{b}k(v+abH^{\ast}+H^{\ast }mv)}{ab+kv+mv}, \end{aligned}$$(14)$$\begin{aligned} &R_{2}=\frac{e^{H^{\ast}m}H^{\ast}v^{b}k(-v+abH^{\ast}+H^{\ast }mv)}{2v-abH^{\ast}+H^{\ast}kv-H^{\ast}mv}, \end{aligned}$$(15)$$\begin{aligned} &R_{3}=\frac{e^{H^{\ast}m}H^{\ast2}(v)^{-1+b}k(ab+mv)}{-1+bH^{\ast }k}, \end{aligned}$$(16)where \(v=1+aH^{\ast}\). The positive equilibrium point \(( H^{\ast },P^{\ast} ) \) of the system (5) is locally asymptotically stable if and only if \(\max\{R_{1},R_{2}\}< R< R_{3}\).
Proof
(a) The Jacobian matrix of the model (5) at the equilibrium point \((0,0)\) is
which has the eigenvalues \(\lambda_{1}=R,\lambda_{2}=0\). Hence, if \(\vert R \vert <1\), the equilibrium point \(( 0,0 ) \) is locally asymptotically stable.
(b) Let us take \(R\geq1\). At \((H_{1}^{\ast},0)\), The Jacobian matrix is
which has the eigenvalues \(\lambda_{1}= -e^{-mH_{1}^{\ast }}v^{-1-b}R(-v+aH_{1}^{\ast}b+H_{1}^{\ast}mv)\) and \(\lambda _{2}=kH_{1}^{\ast}\). By applying the locally asymptotically stable conditions \(\vert \lambda_{1} \vert <1\) and \(\vert \lambda _{2} \vert <1\), we obtain the desired result.
(c) By Theorem 2.1, we know that the equilibrium point \(( H^{\ast},P^{\ast} ) \) exists for \(0<\frac{v^{b}}{R}e^{mH^{\ast}}<1\). We obtain the Jacobian matrix J at the coexistence equilibrium point \(( H^{\ast},P^{\ast} ) \) of the following form in which \(P^{\ast }\) is eliminated:
The characteristic polynomial of the jacobian matrix \(J(H^{\ast },P^{\ast})\) can be written as follows:
where
From Lemma (2.2), we have
If \(R>R_{1}\), then \(p(1)>0\). Considering the condition (b) with the fact \(R>R_{2}\), we have
Similarly, it is easy to see that, if \(R< R_{3}\), then we have
□
Example 2.4
For the parameter values \(m=1,a=1.1,b=1.15,k=2.2\), \(R=10\) and initial condition \((H_{0},P_{0})=(0.5,0.6)\), the positive equilibrium point of the system (5) is obtained: \((H^{\ast},P^{\ast})=(0.701946,0.428465)\). Using these parameter values and equilibrium point, we obtain \(R_{1}=4.82461,R_{2}=0.521704\) and \(R_{3}=13.2983\). From Theorem 2.3(c), the stability region is obtained: \(4.82461< R<13.2983\). As a result, for the above parameter values, the equilibrium point \((H^{\ast},P^{\ast})=(0.701946,0.428465)\) of the system (5) is locally asymptotically stable where blue and red graphs represent \(H(t)\) and \(P(t)\) population, respectively (see Fig. 3).

A stable equilibrium point for the system (5) for \(m=1, a=1.1, b=1.15, k=2.2\), and \(R=10\)
3 Bifurcation analysis
In this section, we will investigate the existence of the Neimark–Sacker bifurcation for the model (5) and present the conditions and direction of the Neimark–Sacker bifurcation [18–25].
A Neimark–Sacker bifurcation occurs at a bifurcation point if and only if system (5) satisfies the following conditions: eigenvalue assignment, transversality and nonresonance condition [26, 27]. The following lemma gives the eigenvalue assignment condition for the Neimark–Sacker bifurcation.
Lemma 3.1
([28])
A pair of complex conjugate roots of \(p(\lambda )=\lambda^{2}+p_{1}\lambda+p_{0}\) lie on the unit circle if and only if
Proposition 3.2
(Eigenvalue assignment)
Suppose that \(-v+abH^{\ast}+H^{\ast}mv>0\), \(2v-abH^{\ast}+H^{\ast}kv-H^{\ast }mv>0\) and \(-1+bH^{\ast}k>0\). If \(\max \{R_{1},R_{2}\}< R=R_{3\text{ }}\)then the eigenvalue assignment condition of the Neimark–Sacker bifurcation in Lemma 3.1 holds.
Proof
From the condition \(R>R_{1}\) we have \(p(1)>0\). On the other hand, the conditions \(-v+abH^{\ast}+H^{\ast}mv>0\), \(2v-abH^{\ast}+H^{\ast }kv-H^{\ast}mv>0\) and \(R>R_{2}\) lead to \(p(-1)>0\). Solving the equation \(D_{1}^{-}=1-p_{0}=0\) with the fact \(-1+bH^{\ast}k>0\), we get \(R=R_{3}\). This completes the proof. □
Now we can analyze the transversality and nonresonance condition for the Neimark–Sacker bifurcation. It is easy to see that the Jacobian matrix of the system (5) has the eigenvalues
where
and
For
these eigenvalues become
where
and
It is easy to see that
On the other hand, the transversality condition leads to
From the nonresonance condition \(trJ(R_{3})=-p_{1}\neq0,-1\), we have
which leads to
Theorem 3.3
Suppose that \((H^{\ast},P^{\ast})\) is the positive equilibrium point of the system (5). If Proposition (3.2) holds, \(R\neq\frac{e^{H^{\ast}m}H^{\ast} v^{1+b}k}{-v+abH^{\ast}+H^{\ast }mv}\), \(R\neq\frac{e^{H^{\ast}m}H^{\ast} v^{1+b}k}{-1-v+abH^{\ast}+H^{\ast}mv}\), and \(a(0)<0\) (respectively \(a(0)>0\)), then the Neimark–Sacker bifurcation of the system (5) at \(R=R_{3}\) is supercritical (respectively, subcritical) and there exists a unique closed invariant curve bifurcation from \((H^{\ast},P^{\ast})\) for \(R=R_{3}\), which is asymptotically stable (respectively, unstable).
Example 3.4
Let us take \(m=1,a=1.1,b=1.15\), \(k=2.2\) and initial condition \((H_{0},P_{0})=(0.5,0.6)\). From solutions of the system (7) and (16), the positive equilibrium point and bifurcation point of the system (5) are obtained: \((H^{\ast},P^{\ast})=(0.76664,0.525223)\) and \(R_{3}=13.81043\), respectively.
In this situation it is easy to check that
and
To compute the coefficients of the normal form, we convert the origin of the coordinates to equilibrium point \((H^{\ast},P^{\ast})\) by the change of variables,
This transforms the system (5) into
This system can be written as
Now, the Jacobian matrix of the discrete dynamical system (25) at the equilibrium point is
and the multilinear functions B and C are defined by
and
Let \(q\in C^{2}\) be an eigenvector of \(J(R_{3})\) corresponding to the eigenvalue \(\lambda_{1}(R_{3})\) such that \(\lambda _{1}(R_{3})q=e^{i\theta _{0}}q\) and let \(p\in C^{2}\) be an eigenvector of the transposed matrix \(J^{T}(R_{3})\) corresponding to its eigenvalue \(\overline{\lambda_{1}(R_{3})} \) such that \(J^{T}(R_{3})p=e^{-i\theta_{0}}p\). By direct calculation, we have
and
These values satisfy
and
To obtain the normalization \(\langle p,q \rangle =1\), we can take the normalized vectors as
and
Now we form \(x=zq+\overline{z}\overline{q}\). In this way, the system (25) can be transformed for sufficiently small \(\vert R \vert \) into the following form:
where \(\lambda_{1}(R)\) can be written as \(\lambda_{1}(R)=(1+\varphi (r))e^{i\theta(R)}\) (where \(\varphi(R)\) is a smooth function with \(\varphi(R_{3})=0\) and g is a complex-valued smooth function). The Taylor expression of g with respect \((z,\overline{z})=(0,0)\) is
where
Now, the coefficient \(a(0)\), which determines the direction of the appearance of the invariant curve in a generic system exhibiting a Neimark–Sacker bifurcation, can be computed via
From Eq. (28), the critical real part is obtained: \(a(0)=-1.03383\). Therefore, a supercritical Neimark–Sacker bifurcation occurs at \(R_{3}=13.81043\) (Figs. 4 and 5).

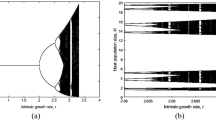
Bifurcation diagram of the system (5) for values of \(m=1,a=1.1,b=1.15\), and \(k=2.2\)

Phase portraits of the system (5) for values of R
3.1 Bifurcation analysis of model (4)
In this section, we give stability conditions of coexistence equilibrium points of the model (6) and show that the model (6) undergoes a Neimark–Sacker bifurcation. Also, we obtain the bifurcation diagrams and phase portraits.
Theorem 3.5
Suppose that \(-1-H^{\ast}+bH^{\ast}>0\), \(2+2H^{\ast }-bH^{\ast}+H^{\ast}k+H^{\ast2}k>0\) and \(-1+H^{\ast}k>0\). Assume that
The positive equilibrium point \(( H^{\ast},P^{\ast} ) \) of the system (6) is locally asymptotically stable if and only if \(\max \{R_{11},R_{12}\}< R< R_{13}\).
Example 3.6
For the parameter values \(b=1.15,k=2.2,R=2\), the positive equilibrium point \((H^{\ast},P^{\ast})\) of the system (6) is calculated as \((H^{\ast},P^{\ast})=(0.10076,0.506785)\). Using these parameter values and equilibrium point, we obtain \(R_{11}=1.64979\), \(R_{12}=-0.40156\), and \(R_{13}=6.01248\). From Theorem 3.5, the stability region is obtained: \(1.64979< R<6.01248\). As a result, for the above parameter values, the equilibrium point \((H^{\ast},P^{\ast })=(0.10076,0.506785)\) of the system (6) is locally asymptotically stable (Fig. 6).

A stable equilibrium points of the system (6) for \(b=1.15,k=2.2,R=2\)
Proposition 3.7
(Eigenvalue assignment)
Suppose that \(-1-H^{\ast }+bH^{\ast}>0\), \(2+2H^{\ast}-bH^{\ast}+H^{\ast}k+H^{\ast2}k>0\) and \(-1+H^{\ast}k>0\). If \(\max\{R_{11},R_{12}\}< R=R_{13}\) then the eigenvalue assignment condition of the Neimark–Sacker bifurcation holds.
Theorem 3.8
Suppose that \((H^{\ast},P^{\ast})\) is positive equilibrium point of the system (6). If the Proposition (3.7) holds, \(R\neq\frac{H^{\ast}(1+H^{\ast})^{1+b}k}{-1-H^{\ast}+bH^{\ast}}\), \(R\neq\frac{H^{\ast}(1+H^{\ast})^{1+b}k}{-2-2H+bH}\) and \(a(0)<0\) (respectively \(a(0)>0\)), then the Neimark–Sacker bifurcation of the system (6) at \(R=R_{13}\) is supercritical (respectively, subcritical) and there exists a unique closed invariant curve bifurcation from \((H^{\ast},P^{\ast})\) for \(R=R_{13}\), which is asymptotically stable (respectively, unstable).
Example 3.9
For the parameters \(b=1.15,k=2.2\) and initial condition \((H_{0},P_{0})=(0.5,0.6)\), the equilibrium point \((H^{\ast},P^{\ast })=(0.59904,0.263645)\) and bifurcation point \(R_{13}=3.06434\) are obtained. In this case, the norm of the eigenvalues is \(\vert \lambda _{1,2}(r) \vert = \vert {-}0.346474\pm0.938059i \vert =1\) (Fig. 7).

Bifurcation diagram of the system (6) for values of \(b=1.15, k=2.2\)
4 Conclusion
This study deals with the stability and bifurcation analysis of a discrete-time host–parasitoid model with Hassell growth function for the host. The existence of the equilibrium points and stability conditions of the system (5) are given. Also, we show that model (5) undergoes a Neimark–Sacker bifurcation by using bifurcation theory.
In the literature, many researchers [29–31] have reported that discrete host–parasitoid models can have very complex dynamics e.g. exhibit periodic and chaotic dynamics. In the study [29], the authors show that there is a stable coexistence between the host and the parasitoid for a large range of the parameter r (intrinsic growth rate for the host population), beyond which the system goes through a quasi-periodicity including a Neimark–Sacker bifurcation. When r is slightly increased beyond a threshold value, a chaotic attractor abruptly appears and the periodic attractor disappears. These results are also valid for our system. Figure 4 shows the bifurcation diagram of the system (5) for the parasitoid population and the host population with \(m = 1\), \(a = 1.1\), \(b = 1.15\) and \(k = 2.2\) as the parameter R (intrinsic growth rate for the host population) increases. If the parameter R reaches 13.2983, then quasi-periodic solutions occur due to the Neimark–Sacker bifurcation.
We also compute the maximum Lyapunov exponent for detecting the presence of chaos in the model. The maximum Lyapunov exponent is the most useful dynamical diagnostic for chaotic system. If the maximum Lyapunov exponent is positive, this implies that we have a chaotic attractor. For a stability state or a period attractor, the maximum Lyapunov exponent must be positive. The existence of chaotic regions in the parameter space is clearly visible in Fig. 8.

Maximum Lyapunov exponents corresponding to Fig. 4
We note that the model (6) which is studied by [16] is the special case of model (5) for \(m=0\) and \(a=1\). In [16], the authors have not given the stability conditions for coexistence equilibrium point and they have not performed a bifurcation analysis. In this paper, we give stability conditions of the coexistence equilibrium point of model (6) and show that model (6) undergoes a Neimark–Sacker bifurcation, too. Finally, all theoretical results for model (5)–(6) obtained are supported with numerical simulations.
References
Banasiak, J.: Notes on Mathematical Models in Biology. Lecture notes
Atabaigi, A., Akrami, M.H.: Dynamics and bifurcations of a host–parasite model. Int. J. Biomath. 10, 06 (2017)
Emerick, B., Singh, A.: The effects of host-feeding on stability of discrete-time host–parasitoid population dynamic models. Math. Biosci. 272, 54–63 (2016)
Dixit, H., Bagler, G., Sinha, S.: Modelling The Host-Parasite Interaction. National Conference on Nonlinear Systems & Dynamics
Bailey, V.A., Nicholson, A.J.: The balance of animal populations. J. Zool. 105(3), 551–598 (1935)
Allen, L.J.S.: An Introduction to Mathematical Biology. Pearson, New Jersey (2007)
Beddington, J.R., Free, C.A., Lawton, J.H.: Dynamics complexity in predator-prey models framed in difference equations. Nature 255, 58–60 (1975)
Sebastian, E., Victor, P., Victor, P.: Stability analysis of a host–parasitoid model with logistic growth using Allee effect. Appl. Math. Sci. 9, 3265–3273 (2015)
Jang, S.R.J., Diamond, S.L.: A host–parasitoid interaction with Allee effects on the host. Comput. Math. Appl. 53, 89–103 (2007)
Jang, S.R.J.: Allee effects in a discrete-time host–parasitoid model. J. Differ. Equ. Appl. 12, 165–181 (2006)
Jang, S.R.J.: Allee effects in an iteroparous host population and in host–parasitoid interactions. Discrete Contin. Dyn. Syst., Ser. B 15, 113–135 (2011)
Courchamp, F., Berec, L., Gascoigne, J.: Allee effects in ecology and conservation. Discrete Contin. Dyn. Syst., Ser. B 15, 113–135 (2011)
Hassell, M.P., Comins, H.N.: Discrete time models for two-species competition. Theor. Popul. Biol. 9, 202–221 (1976)
Hassell, M.P.: The Spatial and Temporal Dynamics of Host–Parasitoid Interaction. Oxford University, New York (2000)
Kon, R.: Multiple attractors in host–parasitoid interactions: coexistence and extinction. Math. Biosci. 201, 172–183 (2006)
Ufuktepe, Ü., Kapçak, S.: Stability analysis of a host parasite model. Adv. Differ. Equ. 2013, 79 (2013)
Jury, E.: Theory and Applications of the Z-Transform. Wiley, New York (1964)
Kuznetsov, Y.A.: Elements of Applied Bifurcation Theory, 2nd edn. Springer, New York (1998)
Wen, G.L.: Critrion to identify Hopf bifurcations in maps of arbitrary dimension. Phys. Rev. E 72, 026201 (2005)
Wiggins, S.: Introduction to Applied Nonlinear Dynamical Systems and Chaos, 2nd edn. Springer, NewYork (2003)
He, Z., Li, B.: Complex dynamic behavior of a discrete time predator-prey system of Holling-III type. Adv. Differ. Equ. 2014, 180 (2014)
He, Z., Qiu, J.: Neimark–Sacker bifurcation of a third-order rational difference equation. J. Differ. Equ. Appl. 19, 1513–1522 (2013)
Peng, M.: Multiple bifurcations and periodic ‘bubbling’ in a delay population model. Chaos Solitons Fractals 25, 1123–1130 (2005)
Sacker, R.J.: Introduction to the 2009 re-publication of the ’Neimark–Sacker’ bifurcation theorem. J. Differ. Equ. Appl. 15, 753–758 (2009)
Xin, G.L., Ma, J., Gao, Q.: The complexity of an investment competition dynamical model with imperfect information in a security market. Chaos Solitons Fractals 42, 2425–2438 (2009)
Guckenheimer, J., Holmes, P.: Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields. Springer, New York (1983)
Robinson, C.: Dynamical Systems, Stability, Symbolic Dynamics and Chaos, 2nd edn. CRC Press, Boca Raton (1999)
Wen, G.: Criterion to identify Hopf bifurcations in maps of arbitrary dimension. Phys. Rev. E 72(2), 026201 (2005)
Lv, S., Zhao, M.: The dynamic complexity of a host parasitoid model with a lower bound for the host. Chaos Solitons Fractals 36, 911–919 (2008)
Zhao, M., Zhang, L., Zhu, J.: Dynamics of a host parasitoid model with prolonged diapause for parasitoid. Commun. Nonlinear Sci. Numer. Simul. 16, 455–462 (2011)
Zhao, M., Zhang, L.: Permanence and chaos in a host parasitoid model with prolonged diapause for the host. Commun. Nonlinear Sci. Numer. Simul. 14, 4197–4203 (2009)
Acknowledgements
The authors would like to thank the referee and the editor for their valuable comments which led to improvement of this work.
Availability of data and materials
Not applicable.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors participated in drafting and checking the manuscript, read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Kangalgil, F., Kartal, S. Stability and bifurcation analysis in a host–parasitoid model with Hassell growth function. Adv Differ Equ 2018, 240 (2018). https://doi.org/10.1186/s13662-018-1692-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1692-x