
Abstract
In this paper, dynamic behaviors of a turbidostat model with Tissiet functional response, linear variable yield and time delay are investigated. The existence and boundedness of solutions, the local asymptotic stability of its equilibria and the phenomenon of Hopf bifurcation for this system are considered. Using the Liapunov–LaSalle invariance principle, we show that the washout equilibrium is global asymptotic stability for any time delay. Furthermore, based on some knowledge of limit set, we show the necessary and sufficient conditions of permanent of the turbidostat model. Finally, numerical simulations are offered to support our results.
Similar content being viewed by others
1 Introduction
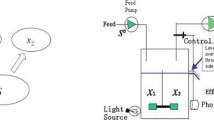
The turbidostat is an important laboratory apparatus used to culture the microorganisms continuously. It is of both mathematical and ecological interest since its applicability in microbiology and population biology. Therefore, the study of the turbidostat model has been one of the hottest subjects investigated by many mathematical and theoretical biologists [1–7].
Dynamical behaviors of ecological systems may be affected by many factors such as time delay, variable yield and functional response. It is well known that the time delay occurs naturally in daily life and makes ecological systems have more complex dynamic behaviors. Therefore, ecological systems with time delay have been investigated in recent years (discrete delays [8–15], neutral delays [16, 17] and impulsive delay [18]). Taking the time delay as a parameter, the stability of the equilibrium may be changed and periodic solutions may occur as the time delay varies. So it is also necessary to consider the impact of the time delay in turbidostat model.
Chemostat models not only with constant yield but also with variable yield [19–24] are considered. Since actual experiments show that the constant yield cannot explain the oscillatory phenomenon in the chemostat, and the greater the nutrient concentrate is the lower the consuming rate is. However, mostly for the turbidostat model we assume that the yield term is a constant. Based on the facts, a variable yield should be considered for the turbidostat model and the model with variable yield will have more complicated dynamic behaviors than that with constant yield.
Furthermore, the functional response also has an important impact on the behavior of biological dynamical systems [25–29]. We note the fact that, in biology, very high nutrient concentration may inhibit the growth of microorganisms actually, and the microorganisms will die eventually as the nutrient concentration increasing unlimitedly. So the Tissiet functional response \(\mu(S)= \frac{\mu_{m}Se^{-\frac{S}{k_{i}}}}{k_{m}+S}\) is introduced, where \(\mu_{m}\), \(k_{m}\) and \(k_{i}\) are positive constants.
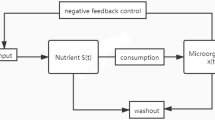
Based on the above biological phenomenon, in this paper, we consider the combined effect of time delay due to the digestion, linear variable yield and Tissiet functional response as the following system:
where \(x(t)\) and \(S(t)\) represent the concentration of microorganism and nutrient at time t, respectively. \(S^{0}>0\) presents the input concentration of the nutrient. \(A+BS(t)\) \((A>0,B>0)\) is the linear variable yield. \(\tau\geq0\) is the delay of digestion, and \(d+kx(t)\) \((d>0, k>0)\) is the dilution rate of the turbidostat.
For the sake of simplicity, we usually set
The bars of \(x(t)\) and k are dropped, and system (1.1) becomes
with initial value conditions
where \(\varphi_{1}(t)\), \(\varphi_{2}(t)\) are continuous functions on \([-\tau,0]\). By a biological meaning, we further assume that \(\varphi_{i}(0)>0\) for \(i=1,2\).
The organization of this paper is as follows. In next section, we analyze the existence and boundedness of solutions of (1.2) with the initial condition. In Sect. 3, the existence, local stability of the equilibriums and the existence of the local Hopf bifurcation are considered. Using the Liapunov–LaSalle invariance principle, we in Sect. 4 discuss the global asymptotic stability of the washout equilibrium of (1.2). In Sect. 5, the permanence of (1.2) is discussed by some analytic techniques on limit sets of differential dynamical systems. Finally, some discussions and numerical simulations are given to illustrate the theoretical analysis in Sect. 6.
2 Existence and boundedness of solutions
In the section, we investigate the existence and boundedness of solutions of (1.2) with the initial condition. The following theorem is achieved.
Theorem 2.1
The solution \((x(t), y(t))\) of system (1.2) with the initial condition exists and is positive on \([0, +\infty)\). Furthermore,
where \(v_{1}= \frac{akdA}{akdA+\mu_{m}^{2}}\).
Proof
From the theory of local existence of solutions of functional differential equations, we see that \((x(t), y(t))\) is existent on \([0, e)\) for some positive constant e. We first show that \(x(t)>0\) for any \(t\in[0, e)\). From the first equation of (1.2) and \(\varphi_{1}(0)>0\), we have
We further show that \(y(t)>0\) for any \(t\in[0, e)\). In fact, if not so, by the continuity of \(y(t)\) and \(\varphi_{2}(0)\geq0\), then there is \(t_{1}\geq0\) such that
where \(\dot{y}(t_{1})\) denotes the right-hand derivative, if \(t_{1}=0\). From the second equation of (1.2) and \(x(t)>0\) for \(t\in[0, e)\), we see that
which contradicts \(\dot{y}(t_{1})\leq0\). This shows that \(y(t)>0\) for any \(t\in[0, e)\).
In the following, we will show that \(x(t)\) and \(y(t)\) are bounded on \([0, e)\). In fact, from the non-negative of \(x(t)\) and \(y(t)\) on \([-\tau, e)\) and system (1.2), we see that for any \(t\in[0, e)\)
Since the solution \(u(t)\) of the following equation:
is existent on \([0, +\infty)\) with the initial condition \(u(t)=\varphi_{1}(t)\geq0\) for \(t\in[-\tau,0]\), from the comparison principle \(x(t)\leq u(t)\) for any \(t\in[0, e)\) the maximum of \(d+kx(t)\) for \(t\in[0, e)\) exists, it is denoted by M. Hence, we obtain
Similarly, from the solution \(v(t)\) of the following equation:
is existent on \([0, +\infty)\) with the initial condition \(v(t)=\varphi_{2}(t)\geq0\) for \(t\in[-\tau,0]\), \(y(t)\leq v(t)\) for any \(t\in[0, e)\). Hence, we see that the solution \((x(t), y(t))\) is bounded on \([0, e)\).
Thus, from the theory of continuation of solutions for functional differential equations, we see that \((x(t), y(t))\) is existent and positive on \([0, +\infty)\). Further, from (2.2), we have
For sufficiently large T, \(t>T\), it is easy to see that from system (1.2)
which implies
where \(v_{1}= \frac{akdA}{akdA+\mu_{m}^{2}}\).
The proof of Theorem 2.1 is thus completed. □
3 Local asymptotic stability of equilibriums and Hopf bifurcations
In this section, we will investigate the existence and local stability of the equilibriums of system (1.2) and Hopf bifurcations are induced by delay.
First, we define the subset
and show that G is a positively invariant set with respect to (1.2).
For any \(\varphi=(\varphi_{1}, \varphi_{2})\in G\), let \((x(t), y(t))\) be the solution of (1.2) with the initial function φ, we see that \((x(t), y(t))\) is positive on \([0, +\infty)\) from Theorem 2.1. We show \(y(t)\leq1\) for any \(t\geq0\). In fact, if there is a \(t_{2}>0\) such that \(y(t_{2})> 1\), from the Lagrange mean value theorem, we see that \(\dot{y}(t_{3})>0\) and \(y(t_{3})=1\) for some \(t_{3} \in(0, t_{2})\). From the second equation of (1.2), we see that
which contradicts \(\dot{y}(t_{3})>0\).
We further show that \(y(t)\geq v_{1}\) for any \(t\geq0\). If not so, there must be \(t_{4}\geq0\) such that \(y(t_{4})=v_{1}\), \(y(t)\geq v_{1}\) for all \(t\in[-\tau, t_{4}]\) and \(\dot{y}(t_{4})\leq0\). From the second equation of (1.2), we see that
which contradicts \(\dot{y}(t_{4})\leq0\).
Therefore, G is a positively invariant set with respect to (1.2). It is enough to consider system (1.2) on G.
Next, we will consider the existence of the equilibriums of (1.2).
From the right part of (1.2), we see that (1.2) always has a washout equilibrium \(E_{0}=(0, 1)\). As far as the positive equilibrium is concerned, the analysis of the equation \(\frac{\mu_{m}y}{a+y}e^{-by}-k(1-y)(A+Cy)-d=0\) is needed. We define
then accordingly we have
Notice that
For convenience, we assume that
Hence, we have the following results.
Theorem 3.1
-
(1)
If \((\mathrm{H}_{1})\) and \((\mathrm{H}_{2})\) hold, then there is no root for \(f(y)=0\) on \([0, 1]\), i.e., system (1.2) only has the washout equilibrium \(E_{0}=(0, 1)\).
-
(2)
If \((\mathrm{H}_{1})\) and \((\mathrm{H}_{3})\) hold, then there is a positive root for \(f(y)=0\) on \([0, 1]\), denoted by \(y^{*}\), i.e., system (1.2) has a unique positive equilibrium \(E^{*}=(x^{*}, y^{*})\), where \(x^{*}=(1-y^{*})(A+Cy^{*})\).
In the following, we will discuss the locally asymptotical stability of the washout equilibrium \(E_{0}=(0, 1)\) of system (1.2).
Theorem 3.2
If \(\frac{\mu_{m}e^{-b}}{1+a}< d\), then \(E_{0}\) is locally asymptotically stable; If \(\frac{\mu_{m}e^{-b}}{1+a}= d\), then the trivial solution of the linearized system of (1.2) about \(E_{0}\) is stable; if \(\frac{\mu_{m}e^{-b}}{1+a}> d\), then \(E_{0}\) is unstable.
Proof
Let \(y_{1}(t)=y(t)-1\) and rewrite \(y_{1}(t)\) as \(y(t)\). We obtain the linear system
The following characteristic equation can be obtained from (3.1):
It is obvious that (3.2) has a negative root \(\lambda_{1}=-d\). We will further study the sign of the root \(\lambda_{2}= \frac{\mu_{m}e^{-b}}{1+a}-d\).
If \(\frac{\mu_{m}e^{-b}}{1+a}< d\), then \(\lambda_{2}<0\). Hence, \(E_{0}\) is locally asymptotically stable.
If \(\frac{\mu_{m}e^{-b}}{1+a}= d\), then \(\lambda_{2}=0\). Hence, we see that the trivial solution of the linearized system of (1.2) about \(E_{0}\) is stable.
If \(\frac{\mu_{m}e^{-b}}{1+a}> d\), then \(\lambda_{2}>0\). Hence, \(E_{0}\) is unstable.
The proof of Theorem 3.2 is completed. □
To consider the local stability of \(E^{*}\) and the existence of Hopf bifurcations, we set
and make the following assumptions:
Theorem 3.3
If \((\mathrm{H}_{4})\) and \((\mathrm{H}_{5})\) hold, then \(E^{*}\) is locally asymptotically stable for \(\tau<\tau_{0}\); \(E^{*}\) is unstable for \(\tau>\tau_{0}\); Hopf bifurcation occurs when \(\tau=\tau_{j}\), \(j=0,1,2,\ldots\) , that is, a family of periodic solutions bifurcate from the positive equilibrium \(E^{*}\) as τ passes through the critical values \(\tau_{j}\), \(j=0,1,2,\ldots\) .
Proof
Let \(\bar{x}(t)=x(t)-x^{*}\), \(\bar{y}(t)=y(t)-y^{*}\) and drop the bars, then we obtain the linear system
The following characteristic equation can be achieved from (3.3):
When \(\tau=0\), (3.4) becomes
According to the Routh–Hurwitz criterion, one can see that (3.5) always has two roots with negative real parts when \((\mathrm{H}_{4})\) holds.
Now for \(\tau>0\), suppose that \(\lambda=iw\) (\(w>0\)) is a root of (3.4) for some τ, then we have
Separating the real and imaginary parts, we obtain
which implies the following equation:
It is easy to see that when \((\mathrm{H}_{5})\) holds, (3.7) has only one positive real root,
By substituting \(w_{0}\) into (3.6) and solving for τ, we can obtain
Thus, when \(\tau=\tau_{j}\), the characteristic equation (3.4) has a pair of purely imaginary roots \(\pm iw_{0}\).
Let \(\lambda(\tau)=\alpha(\tau)+i\beta(\tau)\) be the root of (3.4) near \(\tau=\tau_{j}\) satisfying \(\alpha(\tau_{j})=0\) and \(\beta(\tau_{j})=w_{0}\). Next, we will prove the transversality condition of a Hopf bifurcation.
Differentiating (3.4) with respect to τ, we have
which together with (3.4) leads to
Hence, if \((\mathrm{H}_{5})\) holds, then there is a Hopf bifurcation at \(\tau=\tau_{j}\). Therefore, if \((\mathrm{H}_{4})\) and \((\mathrm{H}_{5})\) hold, then \(E^{*}\) is locally asymptotically stable for \(\tau<\tau_{0}\), \(E^{*}\) is unstable for \(\tau>\tau_{0}\) and there is a periodic solution around \(E^{*}\) for \(\tau=\tau_{j}\), \(j=1,2,\ldots\) .
The proof of Theorem 3.3 is completed. □
4 Global asymptotic stability analysis of \(E_{0}\)
In Sect. 3, we have studied the local stability of \(E_{0}\). In this section, we will analyze the global asymptotic stability of \(E_{0}\) by the Liapunov–LaSalle invariance principle. We obtain the following theorem.
Theorem 4.1
For any time delay τ, if \((\mathrm{H}_{1})\) holds, then the washout equilibrium \(E_{0}\) is globally asymptotically stable for \(\frac{\mu _{m}e^{-b}}{1+a}< d\), and globally attractive for \(\frac{\mu _{m}e^{-b}}{1+a}= d\).
Proof
We have shown that \(G=\{\varphi=(\varphi_{1}, \varphi_{2})\in C | \varphi_{1}\geq0, v_{1}\leq\varphi_{2} \leq1\}\) is a positively invariant set with respect to (1.2).
Consider the function V on G as follows:
where \(V_{1}=-y(t)+ \int_{0}^{t}d(1-y(t)-\frac{x(t)}{A+Cy(t)})\,\mathrm{d}t\). It is clear that \(V(x, y)\) is continuous on G. Its derivative along the solution of (1.2) satisfies
Since (1.2) has a unique equilibrium \(E_{0}\), we have \(f(y)\leq0\) for any \(y\in[0, 1]\). Hence, for any \(t\geq0\)
This implies that \(V(x, y)\) is a Liapunov function of (1.2) on G.
Define the subset E of G as \(E=\{(x(t), y(t))\in G \mid \dot{V}(x, y)|_{\text{(1.2)}}=0 \}\). From (4.2), we see that
Let M be the largest invariant set of (1.2) in E. Since \(E_{0}=(0, 1)\in M\), M is not empty. We discuss the following two cases, respectively.
(i) If \(\frac{\mu_{m}e^{-b}}{1+a}< d\), then \(f(y(t))<0\) on \([0, 1]\). Hence,
Let \((x(t), y(t))\in M\subset E\) be the solution of (1.2). We have \(x(t)\equiv0\) for any \(t\in R\). From the second equation of system (1.2), we see that \(\dot{y}(t)=d(1-y(t))\) for any \(t\in R\). Since \(y(t)\rightarrow1\) as \(t\rightarrow+\infty\), we have \(y(t)\equiv1\) for any \(t\in R\). Therefore,
By the Liapunov–LaSalle invariance principle, we see that \(E_{0}\) is globally attractive. From Theorem 3.2, we see that \(E_{0}\) is globally asymptotically stable.
(ii) If \(\frac{\mu_{m}e^{-b}}{1+a}= d\), then we have \(f(y)=0\) for \(y=1\). Hence,
If \(y(t)=1\) for some \(t\in R\), from the invariance of G, the function \(y(t)\) takes local maximum at t. Hence, it must see that \(\dot{y}(t)=0\). From the second equation of system (1.2), we see that
Since \(y(t)=1\), we see that \(x(t)=0\). Therefore, it has \(x(t)\equiv 0\) for any \(t\in R\). From the proof of case (i), one also has \(M=\{(0, 1)\}=\{E_{0}\}\). Thus, from the Liapunov–LaSalle invariance principle, we see that \(E_{0}\) is globally attractive, again.
The proof of Theorem 4.1 is completed. □
5 Permanence
In this section, we will use the same method as [30] to prove the permanence of (1.2). We have the following theorem.
Theorem 5.1
Under the condition \((\mathrm{H}_{1})\), for any time delay τ, \((\mathrm{H}_{3})\) is the necessary and sufficient condition for the permanence of (1.2).
Proof
If \((\mathrm{H}_{3})\) is not valid, then the washout equilibrium \(E_{0}\) of (1.2) is globally asymptotically stable or globally attractive. Thus, we only need to prove the sufficiency. From the definition of permanence, we need to prove
where \(v_{2}\) is some positive constant which does not depend on the initial function φ. The proof is divided into two steps.
In a first step, we will prove
Since we have the invariance of G, it is enough to consider the solution \((x(t), y(t))\) \((t\geq0)\) with the initial function \(\varphi\in G\). From the above discussion, we see that the omega limit set \(\omega(\varphi)\) of \((x(t), y(t))\) \((t\geq0)\) is nonempty, compact, invariant and \(\omega(\varphi)\subset G\).
If \(\liminf_{t\rightarrow+\infty}x(t)= 0\), we will show that there is a contradiction.
In fact, since \(\liminf_{t\rightarrow+\infty}x(t)= 0\), we see that there exists a positive time sequence \(\{t_{n}\}\): \(t_{n}\rightarrow+\infty\) as \(n\rightarrow+\infty\) such that
By Theorem 2.1, the solution \((x(t), y(t))\) is bounded for any \(t\geq0\). From (1.2), the solution \((x(t), y(t))\) is uniformly continuous for any \(t\geq0\). Hence, by Ascoli’s theorem, there is a subsequence of \(\{t_{n}\}\), still denoted by \(\{t_{n}\}\), such that
uniformly on R in the wider sense. From the invariance of G and Theorem 4.1, we see that \((\bar{x}(t), \bar{y}(t))\in G\) for any \(t\in R\), and that, for any \(\tau\in R\), the function \((\bar{x}(t+\tau), \bar{y}(t+\tau))\) of t is the solution of (1.2) with the initial function \((\bar{x}_{\tau}, \bar{y}_{\tau})\). Here we note that \(\bar{x}(0)=0\) and \(v_{1}\leq \bar{y}(t)\leq1\) for \(t\in R\).
We claim that \((\bar{x}(t), \bar{y}(t))=(0, 1)\) for all \(t\in R\). In fact, if \(\varphi_{1}(0)>0\), then we see that the solution \((x(t), y(t))\) of (1.2) exists and \(x(t)>0\) and \(y(t)>0\) for all \(t\geq0\). Hence, from \(\bar{x}(0)=0\), we further see that \(\bar{x}(t)=0\) for any \(t<0\). Thus, from (1.2), we see that \(\bar{x}(t)\equiv0\) for any \(t \in R\) and that \(\bar{y}'(t))=d(1-\bar{y}(t))\) for any \(t \geq\tau\). Thus,
From the arbitrariness of τ, we see that
From Theorem 2.1, we know that \(\bar{y}(t)\) is bounded for any \(t\in R\). Thus, we have \(\bar{y}(0)=1\), which implies \(\bar{y}(t)=1\) for any \(t\in R\). From system (1.2) and the invariance of G, we see that \((\bar{x}(t), \bar{y}(t))=(0, 1)\) for any \(t\in R\). Thus, the above claim holds.
Specially, we see that
For sufficiently small \(\epsilon>0\) and sufficiently large n, we have
Hence,
which contradicts \(\dot{x}(t_{n})\leq0\).
The proof of \(\liminf_{t\rightarrow+\infty}x(t)> 0\) is completed.
In a second step, we will prove
For any initial functions sequence \(\{\varphi_{n}\}=\{(\varphi_{1}^{(n)}, \varphi_{2}^{(n)})\}\subset G\), let \((x^{(n)}(t), y^{(n)}(t))\) be the solution of (1.2) with the initial function \(\varphi_{n}\). Let \(\omega_{n}(\varphi_{n})\) be the omega limit set of \((x^{(n)}(t), y^{(n)}(t))\). We see that there is some compact and invariant set \(\omega^{*} \subset G\) such that \(dist(\omega_{n}(\varphi_{n}), \omega^{*})\rightarrow0\) as \(n\rightarrow +\infty\). Here, \(dist(\omega_{n}(\varphi_{n}), \omega^{*})\) means Hausdorff distance.
If (5.1) does not hold, for some initial function sequence \(\{\varphi_{n}\}=\{(\varphi_{1}^{(n)}, \varphi_{2}^{(n)})\}\subset G\) such that \(\varphi_{1}^{(n)}(0)>0\), we see that there is some \(\bar{\varphi}=(\bar{\varphi}_{1}, \bar{\varphi}_{2})\in\omega^{*}\) such that \(\bar{\varphi}_{1}(\theta_{0})=0\) for some \(\theta_{0}\in[-\tau, 0]\). Now, let \((\bar{x}(t), \bar{y}(t))\) be the solution of (1.2) with the initial function φ̄. Then, from the invariance of \(\omega^{*}\), we see that \((\bar{x}_{t}, \bar{y}_{t})\in\omega^{*}\) for any \(t\in R\). From \(\bar{\varphi}_{1}(\theta_{0})=0\) and the positivity of all solutions, we easily see that \(\bar{x}(t)=0\) for all \(t\leq\theta_{0}\). Thus, from (1.2), we have \(\bar{\varphi}_{1}(\theta)=0\) \((-\tau\leq \theta\leq0)\) and \(\bar{x}(t)=0\) \((t\in R)\). This implies that \(\bar{x}(t)=0\), \(\bar{y}(t)=h(t)\) for all \(t\in R\), where \(h(t)=1+(\bar{\varphi}_{2}(0)-1)e^{-dt}\).
If \(\bar{\varphi}_{2}(0)<1\), we see that the negative semi-orbit \((\bar{x}_{t}, \bar{y}_{t})\) \((t\leq0)\) is unbounded. This is a contradiction.
If \(\bar{\varphi}_{2}(0)=1\), we see that \(\bar{x}(t)=0\), \(\bar{y}(t)=1\) for any \(t\in R\). This shows that \(\bar{\varphi}=(0, 1)=E_{0}\in\omega^{*}\). We will show that \(E_{0}\) is isolated. That is, there exists some neighborhood U of \(E_{0}\) in G such that \(E_{0}\) is the largest invariant set in U. In fact, we choose
for some sufficiently small positive constant ϵ and \(\epsilon< \frac{\mu_{m}e^{-b}-d(a+1)}{\mu_{m}e^{-b}-d}\). We shall show that \(E_{0}\) is the largest invariant set in U for some ϵ.
If not, for any sufficiently small ϵ, there exists some invariant set W \((W\subset U)\) such that \(W\setminus E_{0}\) is not empty. Let \(\varphi=(\varphi_{1}, \varphi_{2})\in W\setminus E_{0}\) and \((x_{t}, y_{t})\) be the solution of (1.2) with the initial function φ. Then, \((x_{t}, y_{t})\in W\) for all \(t\in R\).
If \(\varphi_{1}(0)=0\), by the invariance of W and Theorem 2.1, we also have the contradiction that \(\varphi=E_{0}\) or that the negative semi-orbit \((x_{t}, y_{t})\) \(t<0\) of (1.2) through φ is unbounded.
If \(\varphi_{1}(0)>0\), from Theorem 2.1, we have \(x(t)>0\) for all \(t\geq0\). Now, let us consider the following continuous function:
for some constant \(\rho>1\). Since \((x_{t}, y_{t})\in W\) for all \(t\in R\), we have \(1-\epsilon\leq y(t) \leq1\) for all \(t\in R\). The time derivative of \(P(t)\) along the solution \((x(t), y(t))\) satisfies
Since \(\epsilon< \frac{\mu_{m}e^{-b}-d(a+1)}{\mu_{m}e^{-b}-d}\) and \(\frac{\mu_{m}e^{-b}}{a+1}>d\), we see that \(\frac{\mu_{m}e^{-b}(1-\epsilon)}{a+1-\epsilon}>d\). We can choose \(\rho>1\) such that \(1<\rho< \frac{\mu_{m}e^{-b}(1-\epsilon)}{d(a+1-\epsilon)}\). From (5.2), for some constant η and all large \(t\geq t_{5}>0\), we see that \(x(t)\geq\eta>0\). Thus, from (5.4)
Thus, \(P(t)\rightarrow+\infty\) as \(t\rightarrow+\infty\). This is a contradiction to Theorem 2.1. We see that \(E_{0}\) is isolated.
It is easy to see that the semigroup defined by the solution of (1.2) satisfies the conditions of Lemma 4.3 in [31] with \(M=E_{0}\). Thus, from the lemma, we see that there is some \(\xi=(\xi_{1}, \xi_{2})\) such that \(\xi\in\omega^{*} \cap(W^{s}(E_{0}) \setminus E_{0})\). Here, \(W^{s}(E_{0})\) is the stable set of \(E_{0}\).
If \(\xi_{1}(0)=0\), by the invariance of M and Theorem 2.1, we have the contradiction that \(\xi=E_{0}\) or that the negative semi-orbit \((\tilde{x}_{t}, \tilde{y}_{t})\) \((t<0)\) of (1.2) through ξ is unbounded.
If \(\xi_{1}(0)>0\), by Theorem 2.1, we see that \(\tilde{x}(t)>0\), \(\tilde{y}(t)>0\) for any \(t>0\). From \(\xi\in \omega^{*} \cap(W^{s}(E_{0}) \setminus E_{0})\), we have \(\lim_{t\rightarrow+\infty}\tilde{x}(t)=0\), \(\lim_{t\rightarrow+\infty}\tilde{y}(t)=1\), which is a contradiction to (5.2). This shows that (5.1) holds. Hence, (1.2) is permanent.
The proof of Theorem 5.1 is completed. □
6 Discussion and numerical simulation
We have studied a turbidostat model with Tissiet functional response, linear variable yield and time delay in this paper. Using comparison principle and some knowledge of functional differential equations, we obtain the global existence and boundedness of solutions of (1.2). Furthermore, based on the Liapunov–LaSalle invariance principle, we also obtain the global attraction and global asymptotic stability of the washout equilibrium of (1.2). The results tell us that the time delay is harmless for the local and global stability of the washout equilibrium of (1.2). However, the stability of the positive equilibrium will be changed and Hopf bifurcations will occur with the time delay varying. Finally, we show that the system is permanent if and only if the positive equilibrium \(E^{*}\) exists. Unfortunately, in this paper, we only consider one of the cases of the existence of the positive equilibriums. The other cases shall be left as future work.
In the section, we present numerical simulation to illustrate the analytical results. By setting \(a=1.2\), \(\mu_{m}=2.5\), \(b=0.1\), \(d=0.2\), \(k=0.5\), \(A=0.2\) and \(C=1.8\), we obtain the following specific example of system (1.2):
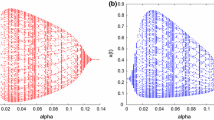
It is easy to see that the conditions \((\mathrm{H}_{1})\) and \((\mathrm{H}_{3})\) hold. Thus, system (6.1) has a positive equilibrium \(E^{*}=(x^{*}, y^{*})=(0.5, 0.27)\). Through a simple calculation, conditions \((\mathrm{H}_{4})\) and \((\mathrm{H}_{5})\) hold, we have \(w_{0}\doteq0.206\), \(\tau_{0}\doteq10.1\) and \(\operatorname{Re}\{ ( \frac{\mathrm{d}\lambda}{\mathrm{d}\tau} )^{-1}_{\lambda=iw_{0}}\}=12.42>0 \). By Theorem 3.3, the positive equilibrium \(E^{*}\) is asymptotically stable when \(\tau=9\) \(<\tau_{0}\) (see Fig. 1). The positive equilibrium \(E^{*}\) is unstable and a Hopf bifurcation occurs, i.e., a bifurcating periodic solution occurs from \(E^{*}\) when \(\tau=11\) \(>\tau_{0}\) (see Fig. 2).

The positive equilibrium \(E^{*}=(0.5, 0.27)\) of (6.1) is asymptotically stable when \(\tau=9 <\tau_{0}\doteq 10.1\). Here \((x(0), y(0))=(0.2,0.4)\)

The positive equilibrium \(E^{*}=(0.5, 0.27)\) of (6.1) is unstable and a bifurcating periodic solution occurs from \(E^{*}\) when \(\tau=11 >\tau_{0}\doteq 10.1\). Here \((x(0), y(0))=(0.2,0.4)\)
References
Cammarota, A., Miccio, M.: Competition of two microbial species in a turbidostat. Comput.-Aided Chem. Eng. 28, 331–336 (2010)
Guo, H.J., Chen, L.S.: Qualitative analysis of a variable yield turbidostat model with impulsive state feedback control. J. Appl. Math. Comput. 33, 193–208 (2010)
Li, B.T.: Competition in a turbidostat for an inhibitory nutrient. J. Biol. Dyn. 2, 208–220 (2008)
Li, Z.X., Chen, L.S.: Periodic solution of a turbidostat model with impulsive state feedback control. Nonlinear Dyn. 58, 525–538 (2009)
Walz, N., Hintze, T., Rusche, R.: Algae and rotifer turbidostats: studies on stability of live feed cultures. Hydrobiologia 358, 127–132 (1997)
Yao, Y., Li, Z.X., Liu, Z.J.: Hopf bifurcation analysis of a turbidostat model with discrete delay. Appl. Math. Comput. 262, 267–281 (2015)
Yuan, S.L., Li, P., Song, Y.L.: Delay induced oscillations in a turbidostat with feedback control. J. Math. Chem. 49, 1646–1666 (2011)
Arugaslan, D.: Dynamics of a harvested logistic type model with delay and piecewise constant argument. J. Nonlinear Sci. Appl. 8, 507–517 (2015)
Deng, L.W., Wang, X.D., Peng, M.: Hopf bifurcation analysis for a ratio-dependent predator-prey system with two delays and stage structure for the predator. Appl. Math. Comput. 231, 214–230 (2014)
Freedman, H.I., Gopalsamy, K.: Global stability in time-delayed single-species dynamics. Bull. Math. Biol. 48, 485–492 (1986)
Kuang, Y.: Delay Differential Equations with Applications in Population Dynamics. Academic Press, New York (1993)
Li, A., Song, Y., Xu, D.F.: Dynamical behavior of a predator-prey system with two delays and stage structure for the prey. Nonlinear Dyn. 85, 2017–2033 (2016)
Liu, L.D., Meng, X.Z.: Optimal harvesting control and dynamics of two-species stochastic model with delays. Adv. Differ. Equ. 2017, 18 (2017)
Smith, H.: An Introduction to Delay Differential Equations with Applications to the Life Sciences. Springer, Berlin (2010)
Wang, T.L., Hu, Z.X., Liao, F.C.: Stability and Hopf bifurcation for a virus infection model with delayed humoral immunity response. J. Math. Anal. Appl. 411, 63–74 (2014)
Nasertayoob, P., Vaezpour, S.M.: Positive periodic solution for a nonlinear neutral delay population equation with feedback control. J. Nonlinear Sci. Appl. 7, 218–228 (2014)
Zhang, G.D., Shen, Y.: Periodic solutions for a neutral delay Hassell–Varley type predator-prey system. Appl. Math. Comput. 264, 443–452 (2015)
Liu, G.D., Wang, X.H., Meng, X.Z., Gao, S.J.: Extinction and persistence in mean of a novel delay impulsive stochastic infected predator-prey system with jumps. Complexity 2017, 1950970 (2017)
Fu, G.F., Ma, W.B.: Hopf bifurcations of a variable yield chemostat model with inhibitory exponential substrate uptake. Chaos Solitons Fractals 30, 845–850 (2006)
Huang, X.C., Zhu, L.M.: Limit cycles in a chemostat with general variable yields and growth rates. Nonlinear Anal., Real World Appl. 8, 165–173 (2007)
Li, Z.X., Chen, L.S., Liu, Z.J.: Periodic solution of a chemostat model with variable yield and impulsive state feedback control. Appl. Math. Model. 36, 1255–1266 (2012)
Meng, X.Z., Gao, Q., Li, Z.Q.: The effects of delayed growth response on the dynamic behaviors of the Monod type chemostat model with impulsive input nutrient concentration. Nonlinear Anal., Real World Appl. 11, 4476–4486 (2010)
Sun, S.L., Chen, L.S.: Complex dynamics of a chemostat with variable yield and periodically impulsive perturbation on the substrate. J. Math. Chem. 43, 338–349 (2008)
Zhu, L.M., Huang, X.C.: Multiple limit cycles in a continuous culture vessel with variable yield. Nonlinear Anal. 64, 887–894 (2006)
Cantrell, R.S., Cosner, C.: On the dynamics of predator–prey models with the Beddington–DeAngelis functional response. J. Math. Anal. Appl. 257, 206–222 (2001)
Haile, D., Xie, Z.: Long-time behavior and Turing instability induced by cross-diffusion in a three species food chain model with a Holling type-II functional response. Math. Biosci. 267, 134–148 (2015)
Rihan, F.A., Lakshmanan, S., Hashish, A.H., Rakkiyappan, R., Ahmed, E.: Fractional-order delayed predator-prey systems with Holling type-II functional response. Nonlinear Dyn. 80, 777–789 (2015)
Tripathi, J.P., Abbas, S., Thakur, M.: Dynamical analysis of a prey-predator model with Beddington–DeAngelis type function response incorporating a prey refuge. Nonlinear Dyn. 80, 177–196 (2015)
Zhang, H., Georgescu, P., Chen, L.S.: An impulsive predator-prey system with Beddington–DeAngelis functional response and time delay. Int. J. Biomath. 1, 1–17 (2008)
Ma, W.B., Takeuchi, Y., Hara, T., Beretta, E.: Permanence of an SIR epidemic model with distributed time delays. Tohoku Math. J. (2) 54, 581–591 (2002)
Hale, J.K., Waltman, P.: Persistence in infinite-dimensional systems. SIAM J. Math. Anal. 20, 388–395 (1989)
Acknowledgements
We are very grateful to the anonymous referees and the editor for their careful reading of the original manuscript and their kind comments and valuable suggestions, which led to truly significant improvement of the manuscript. This work is supported by the National Natural Science Foundation of China (Grant Nos. 11561022; 11701163) and the China Postdoctoral Science Foundation (Grant No. 2014M562008).
Author information
Authors and Affiliations
Contributions
All authors read and approved the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Yao, Y., Li, Z., Xiang, H. et al. Dynamic behaviors of a turbidostat model with Tissiet functional response and discrete delay. Adv Differ Equ 2018, 106 (2018). https://doi.org/10.1186/s13662-018-1566-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1566-2