
Abstract
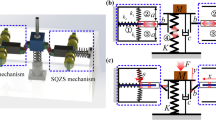
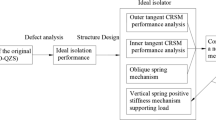
The concept of quasi-zero-stiffness (QZS) vibration isolator was proposed in recent decades to improve the low-frequency isolation performance without increasing the static displacement. This work is devoted to the concrete realization of a QZS isolator by utilizing transverse groove springs. Firstly, the QZS isolator is theoretically analyzed and some dynamical indices are analytically calculated. Then, the transverse groove springs are designed and the isolator prototype is assembled; the QZS feature of the prototype is basically fulfilled. Finally, the experiments are conducted by means of an electrodynamic shaker which generates sinusoidal base excitation for the isolator prototype; the experimental results clearly show the good isolation performance of the QZS isolator and meanwhile reflect some practical factors that should be noticed in actual applications.

















Similar content being viewed by others

References
Demir C, Civalek Ö. Torsional and longitudinal frequency and wave response of microtubules based on the nonlocal continuum and nonlocal discrete models. Appl Math Model. 2013;37:9355–67.
Numanoglu HM, Akgöz B, Civalek Ö. On dynamic analysis of nanorods. Int J Eng Sci. 2018;130:33–50.
Akgöz B, Civalek Ö. Longitudinal vibration analysis for microbars based on strain gradient elasticity theory. J Vib Control. 2012;20:606–16.
Fiebig W, Wróbel J. Two stage vibration isolation of vibratory shake-out conveyor. Arch Civ Mech Eng. 2017;17:199–204.
Chen SB, Xuan M, Xin J, Liu Y, Gu S, Li J, Zhang L. Design and experiment of dual micro-vibration isolation system for optical satellite flywheel. Int J Mech Sci. 2020;179:105592.
Deng CC, Mu DQ, Guo JL, Xie P. Reducing the negative effects of flywheel disturbance on space camera image quality using the vibration isolation method. Front Optoelectron. 2017;10:80–8.
Oh HU, Lee KJ, Jo MS. A passive launch and on-orbit vibration isolation system for the spaceborne cryocooler. Aerosp Sci Technol. 2013;28:324–31.
Sitharam TG, Sebastian R, Fazil F. Vibration isolation of buildings housed with sensitive equipment using open trenches–Case study and numerical simulations. Soil Dyn Earthq Eng. 2018;115:344–51.
Li Q, Zhao JC. Experimental study on the vibration isolation characteristics of hydraulic engine mounts. Exp Tech. 2010;34:34–9.
Bai XX, Jiang P, Qian LJ. Integrated semi-active seat suspension for both longitudinal and vertical vibration isolation. J Intell Mater Syst Struct. 2016;28:1036–49.
Ibrahim RA. Recent advances in nonlinear passive vibration isolators. J Sound Vib. 2008;314:371–452.
Shaw AD, Neild SA, Wagg DJ, Weaver PM, Carrella A. A nonlinear spring mechanism incorporating a bistable composite plate for vibration isolation. J Sound Vib. 2013;332:6265–75.
Li H, Zhang J. Design and analysis of a magnetic QZS vibration isolator. Appl Mech Mater. 2013;470:484–8.
Carrella A, Brennan MJ, Waters TP. Static analysis of a passive vibration isolator with quasi-zero-stiffness characteristic. J Sound Vib. 2017;301:678–89.
Carrella A, Brennan MJ, Waters TP. Optimization of a quasi-zero-stiffness isolator. J Mech Sci Technol. 2007;21:946–9.
Carrella A, Brennan MJ, Kovacic I, Waters TP. On the force transmissibility of a vibration isolator with quasi-zero stiffness. J Sound Vib. 2009;322:707–17.
Carrella A, Brennan MJ, Waters TP, Lopes V. Force and displacement transmissibility of a nonlinear isolator with high-static-low-dynamic-stiffness. Int J Mech Sci. 2012;55:22–9.
Carrella A, Friswell MI, Zotov A, Ewins DJ, Tichonov A. Using nonlinear springs to reduce the whirling of a rotating shaft. Mech Syst Signal Process. 2009;23:2228–35.
Kovacic I, Brennan MJ, Waters TP. A study of a nonlinear vibration isolator with a quasi-zero stiffness characteristic. J Sound Vib. 2008;315:700–11.
Ramirez DFL, Ferguson NS, Brennan MJ, Tang B. An experimental nonlinear low dynamic stiffness device for shock isolation. J Sound Vib. 2015;347:1–13.
Liu CR, Yu KP. Accurate modelling and analysis of a typical nonlinear vibration isolator with quasi-zero stiffness. Nonlinear Dyn. 2020;10:10. https://doi.org/10.1007/s11071-020-05642-2.
Zhou JX, Wang XL, Xu DL, Bishop S. Nonlinear dynamic characteristics of a quasi-zero stiffness vibration isolator with cam–roller–spring mechanisms. J Sound Vib. 2015;346:53–69.
Sun XT, Jing XJ. A nonlinear vibration isolator achieving high-static-low-dynamic stiffness and tunable anti-resonance frequency band. Mech Syst Signal Process. 2016;80:166–88.
Liu CC, Jing XJ, Chen ZB. Band stop vibration suppression using a passive X-shape structured lever-type isolation system. Mech Syst Signal Process. 2016;68–69:342–53.
Meng LS, Sun JG, Wu WJ. Theoretical design and characteristics analysis of a quasi-zero stiffness isolator using a disk spring as negative stiffness element. Shock Vib. 2015;2015:813763.
Carrella A, Brennan MJ, Waters TP, Shin K. On the design of a high-static–low-dynamic stiffness isolator using linear mechanical springs and magnets. J Sound Vib. 2008;315:712–20.
Zheng YS, Zhang XN, Luo YJ, Yan B, Ma CC. Design and experiment of a high-static–low-dynamic stiffness isolator using a negative stiffness magnetic spring. J Sound Vib. 2016;360:31–52.
Dong GX, Zhang XN, Xie SL, Yan B, Luo YJ. Simulated and experimental studies on a high-static-low-dynamic stiffness isolator using magnetic negative stiffness spring. Mech Syst Signal Process. 2017;86:188–203.
Zheng YS, Zhang XN, Luo YJ, Zhang YH, Xie SL. Analytical study of a quasi-zero stiffness coupling using a torsion magnetic spring with negative stiffness. Mech Syst Signal Process. 2018;100:135–51.
Robertson WS, Kidner MRF, Cazzolato BS, Zander AC. Theoretical design parameters for a quasi-zero stiffness magnetic spring for vibration isolation. J Sound Vib. 2009;326:88–103.
Li Q, Zhu Y, Xu DF, Hu JC, Min W, Pang LC. A negative stiffness vibration isolator using magnetic spring combined with rubber membrane. J Mech Sci Technol. 2013;27:813–24.
Liu XT, Huang XC, Hua HX. On the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negative stiffness corrector. J Sound Vib. 2013;332:3359–76.
Huang XC, Liu XT, Hua HX. On the characteristics of an ultra-low frequency nonlinear isolator using sliding beam as negative stiffness. J Mech Sci Technol. 2014;28:813–22.
Kovacic I, Brennan MJ, Lineton B. Effect of a static force on the dynamic behaviour of a harmonically excited quasi-zero stiffness system. J Sound Vib. 2009;325:870–83.
Wang K, Zhou JX, Xu DL. Sensitivity analysis of parametric errors on the performance of a torsion quasi-zero-stiffness vibration isolator. Int J Mech Sci. 2017;134:336–46.
Abolfathi A, Brennan MJ, Waters TP, Tang B. On the effects of mistuning a force-excited system containing a quasi-zero-stiffness vibration isolator. J Vib Acoust. 2015;137:044502.
Hao ZF, Cao QJ, Wiercigroch M. Nonlinear dynamics of the quasi-zero-stiffness SD oscillator based upon the local and global bifurcation analyses. Nonlinear Dyn. 2017;87:987–1014.
Hao ZF, Cao QJ, Wiercigroch M. Two-sided damping constraint control strategy for high-performance vibration isolation and end-stop impact protection. Nonlinear Dyn. 2016;86:2129–44.
Dong GX, Zhang YH, Luo YJ, Xie SL, Zhang XN. Enhanced isolation performance of a high-static–low-dynamic stiffness isolator with geometric nonlinear damping. Nonlinear Dyn. 2018;93:2339–56.
Liu CR, Yu KP. Superharmonic resonance of the quasi-zero-stiffness vibration isolator and its effect on the isolation performance. Nonlinear Dyn. 2020;100:95–117.
Valeev A. Dynamics of a group of quasi-zero stiffness vibration isolators with slightly different parameters. J Low Freq Noise Vib Act. 2018;37:640–53.
Kovacic I, Lenci S. Externally excited purely nonlinear oscillators: insights into their response at different excitation frequencies. Nonlinear Dyn. 2018;93:119–32.
Wang XL, Zhou JX, Xu DL, Ouyang HJ, Duan Y. Force transmissibility of a two-stage vibration isolation system with quasi-zero stiffness. Nonlinear Dyn. 2017;87:633–46.
Wang Y, Li SM, Neild SA, Jiang JZ. Comparison of the dynamic performance of nonlinear one and two degree-of-freedom vibration isolators with quasi-zero stiffness. Nonlinear Dyn. 2017;88:635–54.
Liu CR, Yu KP. A high-static–low-dynamic-stiffness vibration isolator with the auxiliary system. Nonlinear Dyn. 2018;94:1549–67.
Sun XT, Jing XJ. Multi-direction vibration isolation with quasi-zero stiffness by employing geometrical nonlinearity. Mech Syst Signal Process. 2015;62–63:149–63.
Liu CR, Yu KP, Pang SW. A novel eight-legged vibration isolation platform with dual-pyramid-shape struts. Meccanica. 2019;54:873–99.
Zhou JX, Xiao QY, Xu DL, Ouyang HJ, Li YL. A novel quasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platform. J Sound Vib. 2017;394:59–74.
Zhu T, Cazzolato B, Robertson WSP, Zander A. Vibration isolation using six degree-of-freedom quasi-zero stiffness magnetic levitation. J Sound Vib. 2015;358:48–73.
Lan CC, Yang SA, Wu YS. Design and experiment of a compact quasi-zero-stiffness isolator capable of a wide range of loads. J Sound Vib. 2014;333:4843–58.
Le TD, Ahn KK. Experimental investigation of a vibration isolation system using negative stiffness structure. Int J Mech Sci. 2013;70:99–112.
Huang XC, Liu XT, Sun JY, Zhang ZY, Hua HX. Vibration isolation characteristics of a nonlinear isolator using Euler buckled beam as negative stiffness corrector: a theoretical and experimental study. J Sound Vib. 2014;333:1132–48.
Fulcher BA, Shahan DW, Haberman MR, Seepersad CC, Wilson PS. Analytical and experimental investigation of buckled beams as negative stiffness elements for passive vibration and shock isolation systems. J Vib Acoust. 2014;136:031009.
Wu WJ, Chen XD, Shan YH. Analysis and experiment of a vibration isolator using a novel magnetic spring with negative stiffness. J Sound Vib. 2014;333:2958–70.
Xu DL, Yu QP, Zhou JX, Bishop SR. Theoretical and experimental analyses of a nonlinear magnetic vibration isolator with quasi-zero-stiffness characteristic. J Sound Vib. 2013;332:3377–89.
Lu ZQ, Yang TJ, Brennan MJ, Liu ZG, Chen LQ. Experimental investigation of a two-stage nonlinear vibration isolation system with high-static-low-dynamic stiffness. J Appl Mech. 2017;84:021001.
Hao ZF, Cao QJ. The isolation characteristics of an archetypal dynamical model with stable-quasi-zero-stiffness. J Sound Vib. 2015;340:61–79.
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant No. 11372084), which is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of the paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Liu, C., Yu, K. Design and experimental study of a quasi-zero-stiffness vibration isolator incorporating transverse groove springs. Archiv.Civ.Mech.Eng 20, 67 (2020). https://doi.org/10.1007/s43452-020-00069-3
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s43452-020-00069-3