
Abstract
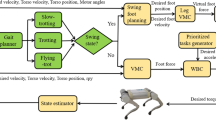
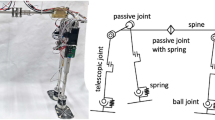
This paper proposes a metamorphic quadruped robot with a moveable trunk, called Origaker I. From the angle view of bionics, the robot can imitate the natural quadrupeds to twist its trunk. As we all know, most natural quadrupeds twist their trunk when running. The twisting trunk must bring significant benefits to their locomotion. Nevertheless there are few researches focusing on running gaits with twisting trunk of quadruped robots. Therefore, this paper investigates the trot gait with twisting trunk. One gait cycle of a lizard with twisting trunk is observed. Apart from the observation, the gait is designed based on the Zero Moment Point (ZMP) method and by considering three points related to the twisting trunk. A simulation and an experiment are carried out to verify the efficiency of the trot gait with twisting trunk. It is found that the twisting trunk helps the quadruped robot get larger stride length and further perform higher locomotion speed than that with rigid trunk.
Similar content being viewed by others

References
Gonzalez-de-Santos P, Garcia E, Estremera J. Quadrupedal Locomotion: An Introduction to the Control of Four-legged Robots, Springer-Verlag Berlin, Heidelberg, Germany, 2007.
Kolter J Z, Ng A Y. The stanford littledog: A learning and rapid replanning approach to quadruped locomotion. International Journal of Robotics Research, 2011, 30, 150–174.
Raibert M, Blankespoor K, Nelson G, Playter R. Bigdog, the rough-terrain quadruped robot. Proceedings of the 17th World Congress–The International Federation of Automatic Control, Seoul, Korea, 2008, 17, 10822–10825.
Boaventura T, Medrano-Cerda G A, Semini C, Buchli J, Caldwell D G. Stability and performance of the compliance controller of the quadruped robot HyQ. IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 2013, 8215, 1458–1464.
Kimura H, Fukuoka Y, Cohen A H. Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts. International Journal of Robotics Research, 2003, 22, 187–202.
De Santos P G, Gálvez J A, Estremera J, Garcia E. SIL04: A true walking robot for the comparative study of walking machine techniques. IEEE Robotics & Automation Magazine, 2003, 10, 23–32.
Bloss R. Robot walks on all four legs and carries a heavy load. Industrial Robot: An International Journal, 2012, 39, https://doi.org/10.1108/ir.2012.04939eaa.005.
Chen X, Gao F, Qi C, Tian X, Zhang J. Spring parameters design for the new hydraulic actuated quadruped robot. Journal of Mechanisms and Robotics, 2014, 6, 021003.
Hyun D J, Seok S, Lee J, Kim S. High speed trot-running: Implementation of a hierarchical controller using proprioceptive impedance control on the MIT Cheetah. The International Journal of Robotics Research, 2014, 33, 1417–1445.
Zhen W K, Kang X, Zhang X S, Dai J S. Gait planning of a novel metamorphic quadruped robot. Journal of Mechanical Engineering, 2016, 11, 26–33. (in Chinese)
Zhang C, Dai J S. Continuous static gait with twisting trunk of a metamorphic quadruped robot. Mechanical Sciences, 2018, 9, 1–14.
Zhang C, Wang X, Wang X, Dai J S. Modeling for a metamorphic quadruped robot with a twisting trunk: Kinematic and workspace. IECON 43rd Annual Conference on Industrial Electronics Society, Beijing, China, 2017, 6886–6892.
Yoneda K, Hirose S. Dynamic and static fusion gait of a quadruped walking vehicle on a winding path. Advanced Robotics, 1994, 9, 125–136.
Yoneda K, Iiyama H, Hirose S. Intermittent trot gait of a quadruped walking machine dynamic stability control of an omnidirectional walk. Proceedings of IEEE International Conference on Robotics and Automation, 1996, 4, 3002–3007.
Kurazume R, Byong-won A, Ohta K, Hasegawa T. Experimental study on energy efficiency for quadruped walking vehicles. Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003, 1, 613–618.
Zhang J Q, Gao F, Han X L, Chen X B, Han X Y. Trot gait design and CPG method for a quadruped robot. Journal of Bionic Engineering, 2014, 11, 18–25.
Horio R, Uchiyama N, Sano S. Trot gait control of quadruped robot based on inclination of body. IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 2014, 2062–2067.
Spröwitz A, Tuleu A, Vespignani M, Ajallooeian M, Badri E, Ijspeert A J. Towards dynamic trot gait locomotion: Design, control, and experiments with Cheetah-cub, a compliant quadruped robot. International Journal of Robotics Research, 2013, 32, 932–950.
Muraro A, Chevallereau C, Aoustin Y. Optimal trajectories for a quadruped robot with Trot, Amble and Curvet gaits for two energetic criteria. Multibody System Dynamics, 2003, 9, 39–62.
Havoutis I, Semini C, Buchli J, Caldwell D G. Quadrupedal trotting with active compliance. IEEE International Conference on Mechatronics, Vicenza, Italy, 2013, 610–616.
Li M, Jiang Z, Wang P, Sun L, Ge S S. Control of a quadruped robot with bionic springy legs in trotting gait. Journal of Bionic Engineering, 2014, 11, 188–198.
Bosworth W, Kim S, Hogan N. The effect of leg impedance on stability and efficiency in quadrupedal trotting. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014, 4895–4900.
Lei J, Wang F, Yu H, Wang T, Yuan P. Energy efficiency analysis of quadruped robot with trot gait and combined cycloid foot trajectory. Chinese Journal of Mechanical Engineering, 2014, 27, 138–145.
Gehring C, Bellicoso C D, Coros S, Bloesch M, Fankhauser P, Hutter M, Siegwart, R. Dynamic trotting on slopes for quadrupedal robots. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 2015, 5129–5135.
Liu W, Zhou L, Qian H, Xu Y. Turning strategy analysis based on trot gait of a quadruped robot. IEEE International Conference on Robotics and Biomimetics (ROBIO), 2017, 1306–1311.
Xin Y, Liu B, Rong X, Li B, Wang H. Research on smooth trot-to-walk gait transition algorithm for quadruped robot. IEEE Chinese Automation Congress (CAC), 2017, 5967–5971.
Acknowledgment
This work was supported by the Natural Science Foundation of China (Project Nos. 51535008 and 51721003) and the Talent Scheme under Grant No. B16034.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Zhang, C., Dai, J. Trot Gait with Twisting Trunk of a Metamorphic Quadruped Robot. J Bionic Eng 15, 971–981 (2018). https://doi.org/10.1007/s42235-018-0085-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-018-0085-x