
Abstract
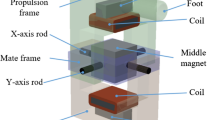
There have been many studies on the moving mechanism of micro robots, such as stick-slip, inchworm like motion, and impact drive. Novel actuators like lead zirconate titanate (PZT), Shape Memory Alloy (SMA), magnetostrictive materials, electromagnetic actuators, electoractive polymers, ultrasonic linear motors, and dielectric elastomers are utilized to realize the moving mechanism. The use of a conventional electromagnetic actuator is unfavorable, because of a few drawbacks, such as generation of stray magnetic fields, hard to miniaturize to the millimeter scale because of 3D integration and a scaling law, and power consumption to maintain a certain position. This research presents a micro robot that uses an electromagnetic actuator customized and developed for micro robot. The electromagnetic actuator is designed from a Brushless Direct Current (BLDC) motor to overcome the drawbacks mentioned above. The developed robot is composed of two electromagnetic actuators. The overall size of the robot is 20 mm × 11 mm × 9 mm (length × height × width) and the weight is 3 g. The developed robot is able to move bidirectionally with a maximum moving speed of 15.76 mm·s−1 (0.79 body-length per second). The optimal conditions of an input signal are calculated theoretically and verified with experiments.
Similar content being viewed by others

References
Dario P, Carrozza M C, Allotta B, Guglielmelli E. Micromechatronics in medicine. IEEE/ASME Transactions Mechatronic, 1996, 1, 137–148.
Idogaki T. Experimental wireless micromachine for inspection on inner surface of tubes. Proceedings of 2nd International Micromachine Symposium, Tokyo, Japan, 1996, 95–98.
Wang L, Zhao B. Dynamic modeling and control strategy for turning in place motion of a two-coaxial pendulums driven spherical inspector based on stick-slip principle. Mechanism and Machine Theory, 2015, 83, 69–80.
Shimoi N, Takita Y, Madokoro H. Development of a wheel robot and micro fling robot using for rescue scenarios. American Journal of Remote Sensing, 2003, 11, 61–66.
Song C W, Lee D J, Lee S Y. Bioinspired segment robot with earthworm-like plane locomotion. Journal of Bionic Engineering, 2016, 13, 293–302.
Driesen W. Concept, Modeling and Experimental Characterization of the Modulated Friction Inertial Drive (MFID) Locomotion Principle: Application to Mobile Microrobots. PhD Thesis, EPFL, Lausanne, Switzerland, 2008.
Eigoli A K, Vossoughi G. Dynamic modeling of stick-slip motion in a legged, piezoelectric driven microrobot. International Journal of Advanced Robotic Systems, 2010, 11, 201–208.
Karpelson M, Wei G Y, Wood R J. Driving high voltage piezoelectric actuators in microrobotic applications. Sensors and Actuators A: Physical, 2012, 176, 78–89.
Driesen W, Rida A, Breguet J M, Clavel R. Friction based locomotion module for mobile MEMS robots. IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, USA, 2007, 3815–3820.
Penella J B. Smart Materials for Micro Robotics Motion Control and Power Harvesting. Universitat de Barcelona, Spain, 2005.
Hariri H H, Soh G S, Foong S, Wood K. Locomotion study of a standing wave driven piezoelectric miniature robot for bi-directional motion. IEEE Transactions on Robotics, 2017, 33, 742–747.
Ramadan K S, Sameoto D, Evoy S. A review of piezoelectric polymers as functional materials for electromechanical transducers. Smart Materials and Structures, 2014, 23, 033001.
Qin C J, Ma P S, Yao Q. A prototype micro-wheeled-robot using SMA actuator. Sensors and Actuators A: Physical, 2014, 113, 94–99.
Lida F, Dravid R, Paul C. Design and control of a pendulum driven hopping robot. Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 2002, 2141–2146.
Vartholomeos P, Papadopoulos E. Analysis and design of a novel mini-platform employing vibration micro-motors. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 2005, 3627–3632.
Vartholomeos P, Papadopoulos E. Analysis, design and control of a planar micro-robot driven by two centripetal- force actuators. Proceedings of IEEE International Conference on ICRA, Orlando, USA, 2006, 649–654.
Klingner J, Kanakia A, Farrow A, Reishus D, Correll N. A stick-slip omnidirectional powertrain for low-cost swarm robotics: Mechanism, calibration, and control. Proceedings of IEEE/RSJ International Conference on Robotics and Automation (IROS), Chicago, USA, 2014, 846–851.
Shi L, Guo S, Asaka K. A bio-inspired underwater microrobot with compact structure and multifunctional locomotion. Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Budapest, Hungary, 2011, 203–208.
Guo Z Y, Li Z X. Size effect on microscale single-phase flow and heat transfer. International Journal of Heat and Mass Transfer, 2003, 46, 149–159.
Bang Y B, Lee K M. Linear motor for ejector mechanism. The International Journal of Advanced Manufacturing Technology, 2004, 24, 582–589.
Lee J, Park W. Robot design for bidirectional locomotion induced by vibration excitation. Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014, 5044–5049.
Lu H, Zhu J, Lin Z, Guo Y. An inchworm mobile robot using electromagnetic linear actuator. Mechatronics, 2009, 19, 1116–1125.
Quirini M, Menciassi A, Scapellato S, Stefanini C, Dario P. Design and fabrication of a motor legged capsule for the active exploration of the gastrointestinal tract. IEEE/ASME Transaction on Mechatronics, 2008, 13, 169–179.
Becker F, Börner S, Lysenko V, Zeidis I, Zimmermann K. On the mechanics of bristle-bots-modeling, simulation and experiments. Proceedings of 41st International Symposium on Robotics, Munich, Germany, 2014, 1–6.
Kim T H, Ehsani M. Sensorless control of the BLDC motors from near-zero to high speeds. IEEE Transactions on Power Electronics, 2004, 19, 1635–1645.
Shin B H, Lee S Y. Micro mobile robots using electromagnetic oscillatory actuator. Proceedings of IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Rome, Italy, 2012, 575–580.
Lee K M, Kim Y S, Paik J, Shin B H. Clawed miniature inchworm robot driven by electromagnetic oscillatory actuator. Journal of Bionic Engineering, 2015, 12, 519–526.
Shin B H, Lee K M, Lee S Y. A miniaturized tadpole robot using an electromagnetic oscillatory actuator. Journal of Bionic Engineering, 2015, 12, 29–36.
Shin B H, Lee S Y, Lee K M, Oh D. Design of rotating moving magnet-type VCM actuator for miniaturized mobile robot. Transaction on Korean Society of Mechanic Engineering A, 2013, 37, 1529–1534. (in Korean)
Acknowledgment
This work was supported by the 2016 Yeungnam University Research Grant.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Shin, B., Kim, Y., Paik, J. et al. Miniaturized twin-legged robot with an electromagnetic oscillatory actuator. J Bionic Eng 15, 106–113 (2018). https://doi.org/10.1007/s42235-017-0008-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-017-0008-2