
Abstract
Purpose of Review
This review aims to evaluate and discuss the current advances in the measurement and assessment of the noise generated by unconventional aircraft, such as unmanned aircraft systems (UAS) and urban air mobility (UAM) vehicles. Building upon the findings of this review, research gaps are identified, and further work is proposed to enhance existing and emerging methods for the appropriate noise management of these advanced air mobility (AAM) technologies.
Recent Findings
Noise has been highlighted as one of the key concerns for the wider deployment of UAS and UAM operations. This is suggested to be due to having acoustic signatures with sound characteristics commonly associated with noise annoyance, such as ‘sharpness’ (the perceived proportion of high-pitched sonic energy) and ‘tonality’ (the perceptual prominence of concentrated sonic energy at discrete frequencies). These types of ‘psychoacoustic features’ are thought to be connected with observations of increased noise annoyance for AAM, compared with conventional aircraft and road vehicles, at the same level of sound exposure.
Summary
In the last few years, there has been a growing body of research on UAS and UAM noise. Research has focused on a comprehensive understanding of the sound sources of these unconventional aircraft under a wide range of operating and operational conditions. Based on gathered evidence, measurement protocols for both laboratory and field studies are very advanced for the acoustic characterisation of UAS in terms of sound level, frequency and directivity. Looking at the human response to UAS and UAM noise, loudness has been consistently reported as the main contributor to noise annoyance, with second-order contributions from other psychoacoustic features, such as sharpness, tonality and ‘amplitude modulation’ (fluctuations in loudness over time), varying among studies. Noise targets for UAS certification have been derived from existing regulations for conventional aircraft and rotorcraft, but might not account for the usually reported annoyance offset between UAS/UAM and conventional vehicles. Key research gaps identified include the lack of studies focusing on multiple events, and deeper understanding of the influence that personal or contextual factors may have on responses, which will be important for the development of robust methods for the assessment and minimisation of community noise annoyance due to the operation of these unconventional aircraft.
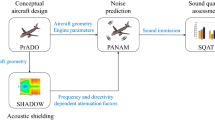
Graphical Abstract

Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Significant advances in electric propulsion and autonomous technologies are leading to innovation in the form of transformational flight technologies and unconventional aircraft designs. ‘Advanced air mobility’ (AAM) stands at the forefront of this innovation, promising a paradigm shift in air transportation of goods and people for urban environments and regional transport. ‘Urban air mobility’ (UAM), focused on sustainable air mobility technologies for urban environments, can be considered as a subset of AAM. Novel aircraft designs within AAM include electric vertical takeoff and landing (eVTOL) aircraft, and unmanned aircraft systems (UAS).
AAM can bring substantial societal benefits, such as more efficient air transportation, reduction of carbon footprint and increase in accessibility. A recent economic impact report predicted socioeconomic benefits of AAM for the UK (by 2040) at an annual valuation in the range of £1.1-2.1bn, and annual reductions in carbon dioxide emissions (CO2e) of up to 222mn tonnes [1]. Forecasts undertaken for the UK government indicate that there may be as many as 900,000 UAS operating by 2030 in the UK alone, with a national economic contribution of up to £45bn, associated with CO2e reductions of 2.4mn tonnes [2].
However, the noise generated by these novel aircraft, and the potential impact this could have on exposed communities, cannot be ignored. Research indicates that societal acceptance of UAM and UAS is likely to hinge on approaches taken to addressing primary public concerns, which, alongside safety, security and privacy risks, include concerns about potential noise pollution [3,4,5] (although the relative importance of these concerns for public acceptance is debated [6]). Moreover, tests indicate that the sense of privacy intrusion from UAS is linked with sound perception [7], suggesting that, even if there is variation in the weight of noise concerns prior to widespread deployment of these technologies, there is considerable value in pre-empting noise problems arising. It is also important to ensure that lessons learned from noise management for conventional civil aviation (e.g., a historically slow, reactive approach, prompting communities to respond with collective action) are applied to the burgeoning AAM sector [8].
It is widely recognised that the acoustic signatures and operational characteristics of AAM vehicles will differ significantly from conventional aircraft and rotorcraft (e.g., refs [8,9,10]). Accordingly, there are important issues that should be addressed to avoid noise becoming a hindrance to the introduction of AAM technology. These include appropriate sound measurement and community noise impact assessment and management for AAM aircraft operations.
This review focuses mainly on commercial and civil applications of UAS, the first AAM aircraft under wider deployment, but also includes ongoing advances in UAM noise. The goal of this review is to present state-of-the-art methods for acoustic measurement, characterisation of human perception and response, noise metrics and regulation applied to UAS and UAM noise.
The research questions addressed by the review comprise:
-
1.
What are the most appropriate noise measurement methods for the acoustic evaluation of UAS and UAM?
-
2.
What metrics are used for assessing human response to UAS and UAM noise?
-
3.
Can psychoacoustic methods improve the assessment of UAS and UAM noise?
-
4.
What are the challenges and opportunities facing current and future UAS and UAM noise management?
Acoustic Measurements
In a pioneering white paper on UAM noise by Rizzi et al. [9], one of the high-level goals recommended was the definition of measurement methods and procedures to support noise regulations and assessment of community impact.
In recent years, the development of methods for sound measurements and further acoustic characterisation of UAS/UAM have been investigated by government aviation agencies, technical standardisation boards and researchers [11,12,13,14,15]. Measurement methods have been developed for UAS, using guidelines originally created for conventional fixed-wing aircraft and rotorcraft (e.g., [16]). The application of existing methods for UAS acoustic certification and the development of new methods and metrics to account for the unconventional acoustic footprint, operational characteristics and annoyance caused by UAS have also been discussed [17, 18].
A summary overview of various experimental approaches employed for noise measurement and acoustic characterisation of UAS is presented in Table 1.
Space-geometrical and environmental parameters are relevant when investigating the applicability of sound measurement setup configurations. Typically, laboratory measurements commonly employ anechoic chamber configurations, which can also include wind tunnel facilities under very controlled ambient conditions and very low background noise levels. In this scenario, the size of the test facility and the airflow conditions could limit the range of operation to test, e.g., hover and yaw manoeuvres.
On the other hand, field measurements consider acoustic evaluation during more realistic UAS operations. In this case, flyovers, hover, landing and takeoff operations are more easily tested. However, outdoor methods should account for the variability of weather conditions, wind gusts and potential interference from other sources of noise in the nearby testing area.
Laboratory Measurements
Intaratep et al. [19] presented one of the first experimental works to evaluate the noise and thrust produced by a small UAS (sUAS) quadcopter during static flight for four different sets of propellers. From a single measurement point, it was possible to detect the tonal spectral components corresponding with shaft frequencies, blade-pass frequencies (BPFs) and upper BPFs’ harmonics. The 4-rotor interaction was found to produce a significant increase in broadband noise at the mid-to-high frequency range. A very prominent tonal component at the high-frequency region, related to the motor ‘self-noise’, was also reported.
The calculation of sound power level (\(L_W\)) of a series of sUAS quadcopters was carried out by Papa et al. [20, 21] applying ISO 3745 [46]. Sound signals were recorded at measurement points over a hemisphere in an anechoic environment during simulated hovering operation.
Cheng and Herrin [23] performed measurements of particle velocity on imaginary surrounding panels at close distances from an sUAS. The far-field sound pressure level (\(L_p\)) was then calculated from the discrete volume velocities. This approach to discretising complex noise sources is commonly referred to as Panel Contribution Analysis.
Tinney and Sirohi [25] investigated the sound produced by an sUAS at static thrust under quasi-hemi-anechoic conditions. Two types of microphone arrays (arc and line) were performed with 4 microphones. The resulting modulation due to the quadratic interaction between the fundamentals of blade passing frequencies (BPFs) were reported from time-frequency analysis.
Didkovskyi et al. [26] investigated the detection of sUAS under different rotor RPMs using a series of acoustic features (e.g., spectrum and narrowband signal representation). Measurements of \(L_p\) were performed under laboratory conditions and further UAS detection was carried out at outdoors. The harmonic structure of the acoustic signal emitted by the sUAS was also considered by Blanchard et al. [47] for localisation of an sUAS by using a beamforming technique. The method was validated with measurements in anechoic and outdoor conditions.
Herreman et al. [27] evaluated the sound power emission of an octocopter UAS in a simulated hovering condition. Data were obtained with a 20 and 40-microphone spherical array. The aim was to project the \(L_p\) at any distance under different environmental conditions. A similar setup was previously applied on a quadcopter sUAS by Herreman [28].
Callanan et al. [29] presented a method to quantify the spatial acoustic pressure distribution of a quadcopter during hovering in the acoustic nearfield. A large scanning microphone array which included 1728 points was used for data acquisition.
Alkmim et al. [30] installed a hemispherical microphone array to measure the sound radiation of a quadcopter sUAS during a simulated hovering operation. Measurements were made of \(L_p\) at different angles, and directivity patterns were presented using spherical harmonics. Additionally, the method allowed for the evaluation of sound quality metrics (SQMs) at any point away from sUAS.
Cussen et al. [31] calculated \(L_W\) from indoor \(L_p\) measurements, and used it as input to sound propagation models for environmental noise mapping, considering the overflight of an sUAS as an omnidirectional source.
An alternative to evaluate the aeroacoustic performance of a quadcopter in free-flying operations under laboratory conditions was presented by Putzu et al. [32]. A modular wind generator system allowed the simulation of non-static flight operations.
Zhou et al. [35] carried out a full-scale, realistic UAS flight test in an anechoic chamber. The rectangular array of microphones provided information about the directivity and sound pressure field on the ground. The measurement reported that the highest OASPL at ground level was observed behind the instantaneous position of the drone during forward flight; this was attributed to the source tilt angle.
Field Measurements
Humphreys et al. [37] characterised the sound emission of an sUAS using an extended field-deployable microphone array. The developed beamforming hardware and software systems allowed the visualisation of the acoustic field produced by one hexacopter during hovering. A beamforming technique was also applied by Zhang et al. [36]. A phase-matched array of 40 microphones was used for the identification of BPFs and their harmonics for a quadcopter during hovering and flyover operations. The acoustic signal was processed by a de-Dopplerisation algorithm, to improve the identification of BPFs during flyovers.
Kloet et al. [22] described a method to report the directivity of an sUAS in hovering operation by means of a yaw profile at different flight altitudes. This paper also includes experiments in laboratory conditions describing the noise profile of an sUAS located at a fixed point simulating a hovering operation. The study identified the clear tonal footprint of the sUAS under study.
Zawodny et al. [24] presented alternatives for exploratory research and applications on the acoustics of sUAS. The document included a complete overview of the acoustic characterisation of sUAS, including tests under both outdoor and wind tunnel conditions, computational predictions, sUAS component tests, auralisations and psychoacoustic tests. It was shown that the proximity of the rotor and airframe components significantly affects the tonal sound emissions produced by a UAS.
Alexander and Whelchel [38] clearly identified the different sound sources of a hexacopter under flyover and hovering operations: tonal components at low frequencies due to BPFs (and their harmonics), rotor self-noise at high frequency and broadband noise at high frequency due to interaction effects. The comparison between the sound exposure level (\(L_{\textrm{AE}}\)) metric calculated for overflight and an equivalent period of hovering indicates that the directivity of the source can significantly influence this metric. Hence, the authors reported that the directivity should be analysed when the impact of community noise is estimated.
A technical report by Read et al. [39] included a detailed description of a measurement campaign for a series of UAS. A comparison of the UAS tested was done on the basis of conventional aircraft noise metrics. The correlation between UAS size and \(L_{\textrm{ASmax}}\) (A-weighted maximum sound pressure level with ‘Slow’ exponential time-weightingFootnote 1) was investigated. It was found that the \(L_{\textrm{ASmax}}\) levels do not vary significantly between slow and fast overflights for the same UAS.
Measurement devices attached to the sUAS during flight operations have also been used with specific sound signal processing goals. Examples of this application are UAS noise synthesis based on experimental data [33], and the design of a UAS system for high-quality audio recording[49].
Hui et al. [40] reported an extensive group of 16 acoustic and psychoacoustic metrics from measurements made during hover and flyover operations at different heights. The data from pole-mounted positions were applied in listening experiments investigating subjective perception and responses to sUAS noise.
Focused on the development of a standard ground-based acoustic measurement procedure for sUAS, Konzel and Greenwood [41] developed a robust method based on a full-sized microphone array. It was found that propagation effects due to changes in meteorological conditions (e.g., wind direction and speed) could be a significant source of variability in reported acoustic metrics, and therefore should be taken into account during measurements outdoors. Additionally, flyovers at higher speeds produced lower \(L_{\textrm{AE}}\), despite the instantaneous increase on \(L_p\), due to the short exposure time.
The estimation of sound emission from different UAS flight operations has also been approached by Cutler-Wood et al. [42]. Source directivity, measured by ground-inverted and elevated microphones in hovering operations, was applied to the prediction of \(L_{\textrm{AE}}\) for takeoff operations. However, it was discussed that the estimated values could have been underestimated at specific angles due to the variability related to flight operation and manoeuvring.
A modelling framework for the acoustic emission of UAS based on measurements was developed by Wunderli et al. [34]. The authors approached the modelling based on noise profiles measured with two possible microphone arrays in anechoic or outdoor environments. The approach was successfully validated with three types of UAS at different flight speeds. An important finding of this work was that the directivity seems to be independent of the rotors’ rotational speed. Forward flight noise emission can be estimated from the stationary hover flight data, and with rotational speed and multicopter-specific corrections.
Ramos-Romero et al. [43] presented a method for field measurements and signal processing for the acoustic characterisation of sUAS through the calculation of \(L_{\textrm{ASmax}}\) and \(L_{\textrm{AE}}\).Footnote 2 The measurement setup followed technical recommendations for outdoor tests made by a NASA UAM noise working group [51], and the guidance in Draft ISO/FDIS 5305 [15]. The techniques used allowed the description of source directivity, following guidance from NLR [16]. Aeroacoustic scaling was made possible by means of correlating acoustic data with the rotor ‘advance ratio’ aerodynamic performance. A psychoacoustic analysis was also carried out using SQMs. Interesting findings include:
-
1.
The spectral balance of broadband and tonal soundFootnote 3 depends on the size of the UAS, with broadband sound dominating for larger UAS and tonal components dominating for sUAS).
-
2.
The maximum noise emission is at the rear arc of the polar directivity (likely due to a pitch angle during forward flight operations).
-
3.
Amplitude modulationFootnote 4 was present in the sound emissions at azimuthal angles of about \(\pm 30^{\circ }\).
The variability in the reported \(L_p\) during hovering operations due to the influence of sUAS state variables was studied by Valente et al. [44]. Acoustic signals were recorded through several hovering altitudes with a single microphone placed in the ground position below the sUAS. Important findings were that noise tends to increase in response to most deviations from the hover trim condition, and that noise is significantly more sensitive to changes in yaw than roll and pitch, both angle and speed.
Lieb et al. [45] analysed the application of ISO 3744 [52] on UAS \(L_W\). The difficulty of exactly repeating the flight path for each UAS operation, even if the automated flight control is pre-programmed, has been reported as an important source of variability during the flight test on-site.
The presented literature on noise measurement methods reports the application of varying approaches from single microphone configurations to advanced beamforming techniques. The selected microphone positions do not follow a standardised height above the ground. Pole-mounted microphone setups include on their recordings the effect of the comb filter due to ground reflection, which might compromise the acoustic characterisation of vehicles tested. A ground-plate inverted microphone configuration avoids the aforementioned filter effect; however, the amplitude recorded must be corrected due to the inclusion of correlated sources (i.e., direct signal and reflected signal) [53].
In addition, digital signal processing facilitates tasks such as frequency domain representation, estimation of aerodynamic noise components and calculation of acoustic and psychoacoustic metrics. Psychoacoustic experiments, aimed at evaluating noise annoyance of tested vehicles, have also been performed from the post-processed data.
In general, the applied measurement protocols have been executed during steady flight operations, overlooking the transitional phases between them. While this approach simplifies analysis, it disregards the complex acoustic signature with time-varying sound and changes in tonal characteristics during transient operations. These abrupt transitions could be considered as potential sources of noise annoyance, indicating a need for a more comprehensive assessment.
Psychoacoustics
Sound Characteristics
Various SQMs have been developed to measure and predict the perceptual characteristics of sound. These aim to describe the subjective impression of temporal and spectral features based on psychoacoustic theory and experimental results. Detailed theoretical developments and empirical bases for several SQMs can be found in refs [54, 55]. To briefly summarise the most relevant components:
-
‘Loudness’ (N) describes the perceptual impression of amplification intensity. This can be expressed either as overall loudness or as ‘specific loudness’, which represents the loudness perceived at different frequencies.
-
‘Sharpness’ (S) can be considered as the degree of higher-frequency spectral skew within the (specific) loudness.
-
‘Roughness’ (R) and ‘fluctuation strength’ (F) are related SQMs indicating the perception of amplitude modulation (temporal level variation) in a sound, either as an overall or ‘specific’ (spectral) evaluation. Each metric covers different ranges of modulation rate that perceptually manifest in different ways:
-
Roughness addresses a perceptual sensation of sonic ‘texture’, due to modulation at rates that are faster than the auditory system can discriminate as discrete ‘rise-fall’ events.
-
Fluctuation strength represents the sense of a sound’s changing loudness envelope over time, due to relatively slow modulation that can be discriminated in terms of its ‘rise-fall’ pattern.
-
-
‘Tonality’ (T) indicates the subjective prominence of discrete harmonic components across the sound spectrum (hums, drones, beeps, whistles, etc).
-
‘Impulsiveness’ (I) describes how much of the sound is composed of discrete rapid changes in the loudness envelope (bangs, clatters, crashes, clicks, etc).
Whereas sound exposure metrics are widely regulated and often standardised (as discussed in the following section, "Sound Exposure Metrics and Noise Regulation"), SQMs can refer to differing models of the basic concepts, and are far less frequently regulated (excepting tonality and impulsiveness, which feature in various rudimentary forms within common environmental noise assessment methods, e.g., [56,57,58]). Nonetheless, SQM standardisation has progressed, albeit with varying implementations (e.g., [59,60,61,62,63,64]).
Sound signatures of UAS or UAM vehicles are acoustically distinctive from other forms of transport, including conventional aircraft or rotorcraft (Fig. 1) [10, 40, 65].

Comparison of narrowband spectra for a range of vehicles, including two multicopter UAS (all spectra normalised to 70 dB \(L_{\textrm{Aeq}}\), with frequency line spacing \(\Delta f = 4\) Hz)

Spectrograms of (top) Airbus A320 passenger jet and (bottom) Yuneec Typhoon hexacopter, with frequency line spacing \(\Delta f=4\) Hz and time resolution \(\Delta t = 0.25\) s (corresponding with spectra shown in Fig. 1)
The distinctive sonic characteristics of UAS are due both to engineering design features and the nature of typical flight operations. The multi-rotor designs incorporate relatively small propellers, operating at higher rotation frequencies than encountered in conventional rotorcraft (such as helicopters). As indicated in Fig. 1, these aspects lead to a skew towards the middle and upper ranges of the frequency spectrum, and introduce complex harmonic spectral characteristics.
The contrast with conventional aircraft is further illustrated in Fig. 2, which shows that, while the passenger jet spectrum is skewed towards lower frequencies and exhibits sparsely-spaced tones (brighter horizontal ‘stripes’) at higher frequencies, the UAS sound contains greater energy concentration in the upper frequencies, and a large number of prominent, closely-spaced tonal harmonics extending from the low frequency into the high-frequency range, which themselves are composed of more than one individual tonal frequency — a characteristic caused by the multiple rotors operating at marginally different rotation speeds, with interactions occurring between rotors.
Flight operations of UAS and UAM typically take place at lower altitude than conventional aircraft, which means there is less influence of atmospheric effects on the sound propagation (including sound absorption by viscous processes and scattering by turbulence, which have greater influence on higher frequencies), helping to emphasise the prominence of blade self-noise in the spectrum [65]. The typical operating proximity also influences the time profile of the sound, as UAS approach, pass and retreat from a static receiving point relatively quickly, meaning the sound has rapid amplitude rise and fall times, compared with conventional civil aviation. UAS and UAM have relatively low mass, and, to compensate for local atmospheric variations, onboard flight controllers must continuously make adjustments to operating parameters to maintain the intended trajectory, which would also be reflected in the sound output, as rotor speeds and torques are varied by the controller. A pronounced radiation directivity pattern [10, 30] may also serve to enhance variability in the sound emissions, which is likely to be further multiplied by a wide range of novel aircraft configurations and designs [66].
Sound quality analysis (Fig. 3)Footnote 5 provides further perceptual insights: while experienced at the same energy time-averaged A-weighted sound level (\(L_{\textrm{Aeq}}\)), the example UAS flyover sounds analysed have much ‘louder’ portions of the sound compared with the steadier vehicle sounds. This feature is expected to contribute to a greater overall impression of loudness, despite the larger weight towards quieter periods within the distributions of time-varying values (which is a consequence of the rapid rise-fall flyover characteristic).
Comparison of the sharpness distribution of the UAS sounds with other vehicle types confirms the observations made in the spectral analyses (Figs. 1 and 2).
The SQM analysis (Fig. 3) also indicates that the UAS flyover sounds have relatively high values of roughness, which is also observed to be a feature of the helicopter sound. On the other hand, by comparison with the helicopter, the UAS fluctuation strength values are relatively low.
Finally, the tonality analysis indicates that the example hexacopter has a relatively high tonality distribution, comparable with the conventional passenger jet.
As discussed below, the various sound characteristics and psychoacoustic qualities of UAS/UAM vehicles influence human detection, perception and responses to acoustic immissions.

Violin plots [67] for distributions of time-varying SQM values for vehicle sounds (corresponding with spectra shown in Fig. 1); diamond markers indicate 95th cumulative distribution percentile values; calculation methods: N according to ISO 532-1:2017 [59], S, R, and F according to Fastl and Zwicker [54], and T according to ECMA-418-2:2022 [64]
Human Detection, Noticeability, Perception and Response
A summary of information from relevant research studies of AAM sound involving human participants is provided in Table 2, indicating the spread of test locations, AAM vehicles and flight operating modes investigated.
Detection, Noticeability and Perception
In an experiment, Huber et al. [70] found that the sound of an sUAS within a highway soundscape could be detected by listeners (over headphones) at a relative A-weighted sound level of -17 dB.
Stalnov et al. [79] used a model of the human auditory system to estimate detection thresholds in recorded soundscapes for measurements of sound from a UAS-type rotor rig. This simulation indicated that predicted detection thresholds were roughly 5 dB higher in the urban environment compared with a rural soundscape, and that an effect of the blade number (influencing the frequencies of prominent tones in the spectrum) was also evident.
Consistent with these predictions, in an immersive audio-visual virtual reality experiment, Aalmoes et al. [76] found that participants rated UAS flyovers as significantly more noticeable and loud when experienced in a quiet rural locale than in a busy urban street setting. In post-test interviews, participants indicated that the UAS sound was less noticeable (and sometimes not noticed) in the urban soundscape, suggesting the ambient environment provided sound masking. The maximum absolute sound level and the visual size of the UAS in the simulations were also found to influence noticeability ratings.
Unsurprisingly, studies have shown that sound exposure metrics designed to approximate human perception of overall loudness, such as Perceived Noise Level (PNL), Effective Perceived Noise Level (EPNL), and A-weighted sound levels are strongly related to subjective impressions of UAS loudness [72, 76, 77], although studies vary in the testing and selection of exposure metrics. Interestingly, Green et al. [77] found that \(L_{\textrm{Aeq}}\) or \(L_{\textrm{ASmax}}\) were equally well-correlated with subjective loudness ratings as the loudness SQM employed (DIN 45631/A1 [80]), and more closely correlated than \(L_{\textrm{AE}}\) (another common sound level index applied to aviation sound sources).
In an online listening test, Torija and Nicholls [75] found that, alongside PNL, ratings of loudness for a wide range of UAS types and operational conditions tended to be most influenced by sharpness and fluctuation strength SQMs, while ratings of ‘perceived pitch’ (using a sliding scale from ‘low pitch’ to ‘high pitch’) were dictated by roughness and tonality SQMs.
Gwak et al. [71] tested perceptions of hovering UAS in a laboratory listening test, finding that categories of semantic sound quality descriptor terms most applied by participants included ‘buzzing’ and ‘sharp’, which were associated with the SQMs fluctuation strength and sharpness, respectively.
Response
Experiments have indicated that UAS sound tends to be judged as more annoying than the noise of either conventional aircraft [71, 73] or road traffic [68, 78], with differences in observed annoyance found to be broadly equivalent to overall A-weighted sound level increases of \(\sim\)5–10 dB and \(\sim\)4–7 dB, respectively. The greater annoyance observed in response to UAS sound at an equal sound level to conventional transportation sounds can be partly explained by the particular sound qualities analysed above (e.g., Fig. 3), as discussed further below.
Several experimental studies have investigated which SQMs appear to influence sound preference ratings or ratings of noise annoyance assigned to AAM sounds within a laboratory setting [40, 65, 66, 68, 69, 71, 74, 75] (Table 2). The majority of these studies have elicited noise annoyance ratings from participants without contextualising responses, and involve short exposures (60 s) in carefully controlled conditions — as discussed further below, this type of response may be considered to represent a kind of ‘psychoacoustic annoyance’Footnote 6, which is related to sound qualities, but effectively absent of judgement framing and emotional connotations. The short exposure durations also omit potential effects that may be associated with long-term or repeated exposures, as typically represented by the ‘chronic’ or ‘field’ annoyance quantified in observational social survey studies [81].
The most consistent result from these experiments is that the loudness of AAM sound (represented either directly in a version of the loudness SQM or in proxy by PNL or an A-weighted sound level index) is, as would be expected, the most important perceptual predictor of noise annoyance [40, 66, 69, 71, 74, 75].
In line with these observations, Gwak et al. [71] developed exposure-response functions (ERFs) for the percentage ‘highly annoyed’Footnote 7 persons (%HA) for experimental sound exposure to three sizes of UAS quad- or octocopters in hover mode (covering a range of takeoff weights from 0.1 to 6.0 kg), and a civil jet aircraft, using \(L_{\textrm{Aeq}}\) as the independent (loudness proxy) variable. Similarly, Aalmoes et al. [73] also derived %HA ERFs using \(L_{\textrm{AE}}\) from laboratory results for a range of UAS/UAM and helicopter flyovers. The resulting ERFs from both sets of experiments exhibit similarities, illustrating the observed ‘offsets’ in annoyance responses between UAS/UAM and conventional aircraft at equal sound levels (Fig. 4)Footnote 8.

Findings from analysis of SQMs bearing secondary influence (after loudness) on annoyance ratings differ between studies, which might be explained in part by variations in the sound qualities of different AAM types and vehicle flight operating modes (see Table 2), as well as by selections of which SQMs to test, differences in SQM implementations and other methodological variations. Studies reported in Table 2 highlight a range of SQMs and SQM combinations as potentially important explanatory factors in predicting subjective responses to the AAM sounds tested in each case.
Some studies have used SQMs identified as influential to refine predictive models for psychoacoustic annoyance, based on a formulation developed by Widmann [84]Footnote 9 from an earlier proposal by Zwicker [85] for a model of ‘unbiased annoyance’Footnote 10. The model for psychoacoustic annoyance (PA) takes the general form:
where:
- \(\gamma\):
-
nominal weighting coefficient terms, to be determined depending on the specific model formulation
- \(w_{X_i}\):
-
a function of each of the n SQMs (represented by \(X_i\)) included in the model, also determined by the specific model formulation
Alongside a loudness function (\(w_N\)), the original PA model was based on sharpness (\(w_S\)), and a combined weighting function incorporating fluctuation strength and roughness (\(w_{FR}\)). For application to (conventional) aircraft sound, More and Davies [87] extended the model by incorporating a tonality term (\(w_T\)). Torija et al. [74] applied the PA model to an experimental UAS rotor rig, finding that predictions were more closely correlated with subjective responses when a term was included for impulsiveness (\(w_I\)), alongside tonality.
Personal and Contextual Factors
The PA model (Eq. 1) omits the potential influence of personal and contextual factorsFootnote 11 on noise annoyance responses, which may include a wide range of influencing variables (Table 3). A considerable body of social survey evidence has shown that factors such as these can have a substantial effect on responses to noise [88]. As discussed below, some of these factors have been investigated in relation to UAS/UAM noise.
Torija et al. [72] found that soundscape scenes with a hovering UAS present were judged to be quieter, less annoying and had increased ratings of pleasantness in soundscapes more influenced by road traffic than soundscapes with a lesser component of road traffic sound (in other words, the adverse impact of UAS noise on responses appeared to be higher in soundscapes less affected by road traffic noise, and vice versa).
Similar results were obtained by Aalmoes et al. [76], who found that annoyance ratings attributed to UAS sound were higher in a rural (soundscape and landscape) virtual environment, than in an urban street scene. Interview responses elaborated that ratings were influenced by the incongruence between participants’ preconceived expectations for a rural location and an apparently intrusive noise source.
Aalmoes et al. [76] also investigated the potential influence of attitudinal framing in the experiment. The participant sample was separated into two groups: one group was played a video intended to emphasise positive aspects of the use of UAS, while the other served as a control and was not exposed to any framing. The results indicated the framing had a negligible effect on the outcome measures, which is somewhat in contrast with previous experimental results obtained in relation to wind turbine infrasound [89, 90]. The authors speculated that their unexpected results could have been due to the control group having received ‘no framing’, rather than an active opposing condition, i.e., ‘negative framing’.
Krishnamurthy et al. [78] tested the influence of participant contextual briefing cues on ratings of noise annoyance in relation to UAS and road vehicle sounds within a remote, internet-hosted listening study. The participant sample was divided into two groups: one group were briefed with a contextual cue instructing them to imagine the exposure occurring repeatedly outdoors near their home, while the control group were not provided with a contextual cue. The results indicated that the contextual cue group assigned higher annoyance ratings to the UAS sound than the control group. Interestingly, the analysis suggested that the effect of context briefing on annoyance responses did not extend to the road vehicle sounds. A plausible explanation for this result could include the effects of familiarity and personal involvement with road vehicles.
Within the same study, the sample was also stratified by geographic region of residence, with the separation applied by participant postal code into eastern and western parts of the US. Analysis indicated regional differences in responses; participants located in the western region had higher annoyance responses. Details of the characteristics of locations or demographics that might support further consideration of explanations for this apparent difference were not reported.
Variations in human responses to noise in different locations (nations, regions and communities) are often found in observational studies based on social surveys (e.g., in relation to conventional aircraft noise, refs [91, 92]). As noted in Table 2, the experimental studies discussed in this section include participants covering (at least) seven countries over three continents, with a range of different local environments and cultures. However, of these studies, only one has reported a systematic investigation of the influence of participant locations on subjective judgements (ref [78], as discussed above). Heterogeneity among experimental studies also makes direct international comparisons difficult, so it may not yet be feasible to assess these issues in detail in relation to AAM sound. However, investigating potential geographic variations may become more realistic in observational study contexts as flight trials and commercial deployments are introduced. Progress in developing online-based surveys and experiments may offer particular opportunities for investigating such factors further.
Sound Exposure Metrics and Noise Regulation
The governance and regulation of UAS noise is broadly being managed by the aviation regulators including the Federal Aviation Administration (FAA) in the US, the European Union Aviation Safety Agency (EASA), and the Civil Aviation Authority (CAA) in the UK. As such, it is understandable why the certification and assessment methodologies being proposed are strongly influenced by existing aviation and rotorcraft noise assessment methods. However, as the differences between the acoustic characteristics of UAS and conventional aircraft and rotorcraft along with human perception of UAS sound become better understood, the need for further research into appropriate assessment metrics for UAS has become more apparent.
UAS Certification
There are several established conventional metrics that can be used to establish potentially suitable criteria for UAS noise. Some of the metrics frequently used for certification (the method of regulating the maximum allowable sound level an individual aircraft is allowed to emit) of conventional aircraft and rotorcraft include
-
\(L_{\textrm{AE}}\), which represents the overall (A-weighted) acoustic energy within a single event by summing the energy between the maximum level and the \(\pm 10\) dB points of the event
-
PNL, which is a time-integrated descriptor for the overall perceived loudness based on the ‘Noy’ scale, derived from a combination of amplitude and frequency in third-octave bands [93]
-
EPNL, which elaborates on PNL by including a tonal correction, calculated through analysis of the third-octave band data — this metric is commonly used for the noise certification of larger commercial aircraft, both propeller and jet driven [94]
For the classification of UAS, vehicles are separated into different categories depending on a number of factors, including (but not limited to) weight, size, purpose and proximity of use to human populations. These categories are called Open (low-risk operations), Specific (moderate risk) and Certified (high risk) within the EU and UK. Depending on the classification of the UAS the noise certification method is different.
For sUAS weighing less than 4 kg that would generally fall into the Open category and would be operated within visual line of sight and away from urban areas, EASA has specified maximum A-weighted sound power levels [95, 96] (\(L_{W\textrm{A}}\)), dependent on the UAS class and maximum takeoff mass (MTOM) (Table 4).
No limits are specified within the regulation for classes C3 and above (which could fall into the ‘specific’ or ‘certified’ categories depending on other factors. Though the \(L_{W\textrm{A}}\) must be published for all classes of UAS. The measurement method required for the classification of Open category UAS noise is described within ISO 3744 [52]. However, concerns have been raised about the practical implementation of the measurement method [97]. Some of the issues encountered with the measurements included difficulties maintaining the UAS in a stationary hover position for the required 20 s, 5–10 s was considered more realistic and a lack of clarity relating to where the specified 0.5 m above ground hover height was to be measured from, i.e., UAS centre or foot plane. Treichel et al. [97] goes on to highlight other limitations within the method such as appropriate correction values that relate to the difference between product noise and extraneous noise and environmental correction parameters. The paper concluded by recommending that the method recommended within 2019/945 is in need of optimisation and should include a requirement to collect acoustic data for operating states other than hover.
For UAS with an MTOM up to 600 kg operating in the ‘Specific’ category, new guidance from EASA [12] recommends acoustic data is collected for both hover and flyover or cruise operations. The guidance recommends that (\(L_{\textrm{AE}}\)) is the metric to be reported for flyover operations, and \(L_{\textrm{Aeq}}\) is recommended for hover operations. Unlike the Open category, no specific noise limits were recommended within this document. The guidance does not recommend a measurement method or presentation metric for other operations such as takeoff, landings or transitions.
The Federal Aviation Administration (FAA) applied a noise certification standard in 2022 for the Matternet Model M2, a quadcopter designed for parcel delivery with an MTOM of 11.5 kg [98]. Subsequently, certification standards have been issued for a number of UAS applications to operate within the US. Noise certification standards are being issued to individual UAS, as it was noted that no ‘generally applicable noise certification standards were available’ at the time the aircraft were presented for certification [99]. The certification process for flyover noise has been broadly based on the noise certification method for small helicopters defined within Part 36, Subpart H, Appendix J of the Code of Federal Regulations [100]. Although alterations to the method have been proposed to make it more suitable for UAS, such as reducing the flyover altitude to 250 ft from 492 ft, the standards have stipulated a noise limit of 78 dB \(L_{\textrm{AE}}\), which roughly equates to the same limit as small helicopters once the change in flyover altitude has been factored into the calculation. The rationale for this maximum noise level provided by the FAA is that it is their intent to ‘maintain a consistent noise certification approach that includes aircraft of all sizes, including UAS’ [98].
A recent consultation paper by EASA [101] presented a method for the certification of larger UAM vehicles. This method has recommended EPNL (measured in EPNdB) as the metric to be used for takeoff, flyovers and approach operations, and \(L_{\textrm{Aeq}}\) for hover operations. The range of maximum allowable EPNLs for takeoff, flyover and approach operations are dependent on the MTOM of the vehicle (Table 5); a maximum allowable level (\(L_{\textrm{Aeq}}\)) has not been specified for hover operations.
Concerns have been raised regarding the use of EPNL and how appropriate the tonal correction will be for UAS [68, 102]. EPNL applies a correction based on the single most significant tonal element of the noise, which may be suitable for aircraft where the jet engines operate in unison. However, this is not the case for UAS, where propellers may be rotating at different speeds. This results in multiple BPFs and harmonics, which could manifest in prominent and dissonant multi-tonal characteristics. Supplementing PNL with a tonality SQM could improve assessment of multiple tones within a sound.
Efficacy of Environmental Impact Metrics — Single Event
Several research papers discuss the efficacy of conventional metrics for predicting human response, particularly annoyance, to single-event UAS noise. Green et al. [77] designed a listening experiment to investigate the suitability of different broadband metrics in estimating perceived loudness and annoyance associated with four different UAS operations (takeoff, hover, landing and flyover) when the listener is simulated to be in either an indoor or outdoor location. Results of the experiment indicated that the \(L_{\textrm{Aeq}}\) and \(L_{\textrm{ASmax}}\) metrics performed equally well at predicting both perceived loudness and annoyance.
Another study [40] found that both \(L_{\textrm{Aeq}}\) and \(L_{\textrm{AFmax}}\) (‘Fast’-weighted maximum sound level) have a strong correlation with the annoyance associated with a hovering UAS, while \(L_{\textrm{AE}}\) and \(L_{\textrm{AFmax}}\) both demonstrated a strong correlation with annoyance for UAS flyover events.
Efficacy of Environmental Impact Metrics — Multiple Event
To date, little research has been identified which investigates the efficacy of metrics designed to measure the impact of multiple UAS noise events.
There are several examples of Environmental Noise Impact Assessments for commercial UAS operations [103, 104] in the US that have used the Day-Night Level (\(L_{\textrm{dn}}\)) as the metric for measuring impact over a period that may feature multiple events. \(L_{\textrm{dn}}\) is the standard noise index used by the FAA to represent impact over a 24-h period, taken as an average over 1 year. \(L_{\textrm{dn}}\) applies a +10 dB penalty to the sound level during a 9-h night-time period (2200–0700 h), which is time-averaged along with the (non-penalised) 15-h daytime period [105].
In the EU, the Day-Evening-Night Level (\(L_{\textrm{den}}\)) is typically used for the same purpose - this is very similar to \(L_{\textrm{dn}}\), but with a shorter 12-h daytime period definition, an intermediate +5 dB penalty applied to the sound level during a 4-h evening period, and an 8-h (+10 dB-penalised) night period,Footnote 12 as defined in Eq. 2.
The Survey of Noise Attitudes (SoNA) published by the CAA [106] found that, for conventional aircraft, the metric with the highest efficacy for estimating annoyance was the \(L_{\textrm{Aeq}}\) over the 16-h daytime period 0700–2300 h (\(L_{\textrm{Aeq,16h}}\)). The \(L_{\textrm{Aeq,16h}}\) is the primary metric currently used in the UK to quantify aircraft noise impacts. However, the study acknowledges that the time-averaged and logarithmic nature of \(L_{\textrm{Aeq,16h}}\) can impede public understanding. Consequently, the CAA also states that ‘Number Above’ event metrics, i.e., single events which exceed a specified \(L_{\textrm{ASmax}}\) level within a time period, could be beneficial as supplemental metrics, as they may be easier for exposed communities to understand—in view of the potential influence of contextual factors noted above, ensuring community understanding could enhance trust in regulating authorities, which may in turn help to mitigate adverse responses to noise. The criterion recommended by the CAA is the N65, denoting the number of events that exceed 65 dB \(L_{\textrm{ASmax}}\). A similar observation is noted within [107], which questions the applicability and accuracy of using average noise indicators \(L_{\textrm{den}}\) and \(L_{\textrm{night}}\) to observe associations between aircraft noise and health outcomes (such as awakening reactions). Instead, the document states that indicators based on number of events (such as frequency of \(L_{\textrm{Amax}}\) exceedances) may be more appropriate. However, it concedes that such indicators are not currently widely used. Further research is required into the efficacy of different metrics, including both period-weighted and time-averaged metrics such as \(L_{\textrm{dn}}\) or \(L_{\textrm{Aeq,16h}}\), and ‘Number Above’ event-based metrics, for quantifying the environmental noise impact, as this appears to be a significant gap in current knowledge.
Summary and Conclusions
The proliferation of regulatory controls and certification procedures (some at consultative proposal stages), and strategic visions for future airspace management [108, 109], indicate that AAM, UAM and UAS are quickly becoming viable and attractive concepts for civil aviation. This deployment will inevitably be accompanied by a degree of noise ‘pollution’, involving novel and diverse sound sources, and supporting infrastructure.
The body of research covering acoustic measurements, sound characterisation, application of noise metrics, psychoacoustics, human perception, and response to UAS and UAM noise is rapidly expanding. Procedures for laboratory and field measurements have been developed to achieve detailed characterisation of and insights into UAS acoustic emissions for the main operating flight modes, in terms of sound intensity, spectro-temporal and spatial directivity features. Psychoacoustic experiments have demonstrated that the particular acoustic features of UAS sound have the potential to increase noise annoyance responses compared with those associated with existing transportation modes. This suggests it will be vital to consider sound quality parameters alongside the more traditional intensity-centred sound characterisation approaches. Noise regulation and certification procedures aimed at managing UAS and UAM environmental impacts have been introduced or proposed, although these are primarily based on existing aviation noise management approaches. Uncertainty remains over whether such conventional strategies can provide adequate support and mitigation for these innovative aircraft technologies, in view of the acoustical distinctions observed.
The current research evidence suggests that UAS (and potentially UAM) noise presents particular challenges and potential opportunities. The sonic characteristics of UAS are markedly different from traditional aircraft and rotorcraft, with features that may attract attention and cause disturbance. Torija and Clark [8] discussed how noise impact from UAS operations could potentially undermine positive environmental and societal advantages that these new aircraft technologies can bring. The use of UAS for parcel deliveries can reduce greenhouse gas emissions (per parcel-kilometre) compared with internal combustion engine ground transportation [110], which could contribute to improving air quality and addressing global heating. Increased accessibility and capacity for medical deliveries (especially for remote or otherwise difficult-to-reach areas) are also important societal benefits associated with UAS [111].
As well as easing the introduction of a new technology with broad societal benefits, effective management of noise from AAM is important for protecting the health of individuals and promoting wellbeing. For example, aside from annoyance, noise from conventional aircraft has been associated with sleep disruption [112], cognitive impairment, reading comprehension and language development in children [113, 114], and may be associated with incidence of anxiety, depression and cardiovascular disease [115, 116]. Moreover, noise annoyance itself has been suggested as potentially linked with increased risk of adverse mental health outcomes [117]. Controlling sound immissions from UAS/UAM will contribute to reducing these risks for individuals, and the associated public health burden for societies.
The currently embryonic deployment stage of these unconventional aircraft, intersecting with contemporary psychoacoustic understanding, modelling and analysis techniques, suggests that research efforts to ease the introduction of AAM technology into society could have substantial societal impact, enhancing the potential benefits of improved connectivity and more-sustainable transportation. Research gaps identified by the present review are summarised in the following section.
Key Findings and Research Gaps
Research into UAS (and UAM) noise measurements, metrics, perception and response to noise is a recently-emergent field, with relatively few studies published (especially in the case of UAM noise). The key findings from an extensive literature review, and scope for further work, are presented below:
-
Acoustic Measurements
-
In most laboratory experiments, the constraints posed by facility size and the need for collision avoidance measures often result in the assessment or simulation of flight operations under static conditions, where the UAS is affixed at a particular location and angle. This can make it hard to measure how different rotational speeds affect the noise footprint produced by UAS when they turn or tilt. The design of stands that offer additional degrees of freedom could potentially improve the accuracy of noise measurements. A significant challenge in laboratory measurements is the replication of the effects of small variations in vehicle operating conditions (due to weather conditions and vehicle control system) which significantly influenced the UAS (and especially sUAS) noise emission.
-
Field measurement methods allow a complete characterisation of UAS sound emissions, including information on sound pressure levels, frequency spectra and directivity. Even with a large number of approaches to reduce variability, such as pilot control, programmed trajectory overflights and testing in fairly stable weather conditions, the sound footprint of UAS has proven to be as complex and different as the number of UAS types available in the market. However, UAS acoustic footprints share some consistent features, such as prominent tonal components in the low-to-mid frequency region, broadband noise in the mid-to-high frequency region, and electric motor noise in the high-frequency region (although the dominance of each of these components varies depending on the UAS size [43]). The development of an approach to develop a scaled noise emission level analysis framework, based on the stratified category of UAS and performance parameters [118] supported by acoustic measurements on the ground, could be beneficial for the overall characterisation of UAS.
-
Although the measurement techniques presented in this review focus on the evaluation of individual flight events, such as stationary flight or overflight of a single UAS, it is crucial to investigate the acoustic footprint generated by more realistic or potential scenarios, such as the evaluation of repeated overflights. Regarding individual aircraft operations, modelling approaches for quantifying the overall noise footprint of an AAM vehicle during a complete operation cycle (e.g., takeoff, transition to forward flight, flyover, hover, landing) are needed.
-
While promising results have been obtained in the acoustic characterisation of sUAS, there is considerable potential to extend these techniques to larger vehicles (e.g., eVTOL for UAM) that could incorporate more complex multi-rotor propulsion systems, with different operating conditions. Consequently, extending current UAS acoustic characterisation methods to suit the diverse spectrum of larger multi-rotor aircraft systems emerges as a necessary task.
-
The majority of published research in acoustic measurements has so far been focussed on UAS of a relatively small size. This is likely due to both practical reasons, such as unit cost, ease of acquisition and logistical arrangements for smaller vehicles, and the commercial issues surrounding larger UAM aircraft innovation, including the technology readiness, research and development costs, intellectual property protection concerns, etc.
-
-
Human Detection, Noticeability, Perception and Response
-
Sound quality analysis indicates that UAS acoustic emissions can contain characteristics that are distinctive in comparison with conventional vehicle sound, which may increase the risk of adverse responses, such as noise annoyance.
-
Evidence suggests that loudness perception is the primary contributor to AAM noise responses. Sound exposure metrics commonly used for aircraft noise assessment (e.g., \(L_{\textrm{Aeq}}\), \(L_{\textrm{ASmax}}\) and \(L_{\textrm{AE}}\)) have been found to correlate reasonably well with UAS noise annoyance and perceived loudness. However, research shows that other psychoacoustic features (e.g., sharpness or tonality) also influence the overall perception of sound generated by AAM vehicles. This indicates that models and metrics could be improved by incorporating sound quality components, which can more accurately represent the perception of the distinctive acoustic characteristics of AAM sound emissions.
-
Only a small number of experimental studies have investigated the effects of personal and contextual factors on responses, and the available evidence indicates these could have considerable influence, which should be accounted for.
-
The existing human response studies generally consider the sound of an individual AAM vehicle. In a similar manner to conventional aircraft, commercial deployment of the technology in urban areas would likely involve centralised ‘vertiports’ and demarcated flight paths hosting multiple vehicles at any given time — as yet, the more complex psychoacoustics of these types of scenario have not been examined.
-
Further experimental research could be used to develop indicative exposure-response functions for annoyance, which are often useful in regulatory contexts.
-
The usefulness of SQMs in practical regulatory applications remains constrained by variation in implementations (despite the advancements in standardisation of methods), as well as by the need for high-fidelity acoustic data as input, which remains challenging for data handling in the context of routine field surveys of environmental sound. This suggests a continuing need for metrics that approximate sound quality, based on efficient models that can predict perception and response to UAS/UAM sound from lower fidelity data, without compromising on an acceptable degree of accuracy.
-
No studies have yet been identified that explore the potential impact of UAS sound on sleep, or physiological responses. Research employing objective response measurement methods could be valuable in developing understanding in these areas.
-
Although commercial/public deployment of UAS/UAM technology remains mainly at trial stages, flight operation trials do offer valuable opportunities for field research within relevant communities, and to compare observational data with experimental results.
-
This review has focussed on evidence on the effects of human exposure to AAM sound, yet to support and mitigate the introduction of this technology it is also important to investigate the potential for sound and noise to affect wildlife.
-
-
Sound Exposure Metrics and Noise Regulation
-
Although the regulation on UAS/UAM noise is steadily increasing, with recommended measurement methods and targets for noise certification, this is mainly based on existing practice for conventional aircraft and rotorcraft. There are some important issues with this approach, as (i) the operational characteristics of UAS (and UAM) differ from conventional aircraft; and (ii) the derivation of noise targets for UAS based on conventional aircraft and rotorcraft (accounting only for changes in source-receiver distance) might not be appropriate due to the usually found annoyance offset between UAS and conventional vehicles for the same sound level.
-
As yet, given the lack of studies examining multiple UAS/UAM events, there is insufficient evidence to confirm whether existing multiple event aircraft noise metrics are suitable for UAS/UAM noise assessment and management.
-
Data Availability
Data obtained by the authors during experiments described in this article may be made available on request.
Change history
10 May 2024
A Correction to this paper has been published: https://doi.org/10.1007/s40726-024-00311-z
Notes
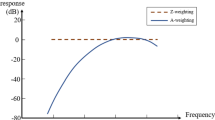
A-weighting is applied to sound signals as a coarse approximation of the frequency-dependency of human loudness perception. This enables the convenience of a single-figure level value to be assigned to the signal that is roughly proportional to the perceived loudness, although the reliability of this procedure for different sounds is widely debated. Time-weighting is applied to ‘smooth’ a signal, which enables meaningful statistical descriptors to be extracted on a time-varying basis; the degree of smoothing applied is proportional to the weighting time constant (with ‘Slow’ weighting applying greater smoothing than ‘Fast’ weighting). Technical information and mathematical descriptions can be found in ref [48].
The corresponding sUAS sound recording database is available in [50].
‘Broadband sound’ comprises acoustic energy over a (wide) range of frequencies, while ‘tonal sound’ comprises concentration of energy at individual frequencies — the ‘tonality’ (or lack thereof) of a sound can also be understood from a psychoacoustic perspective, as described in the "Sound Characteristics" sub-section.
‘Amplitude modulation’ can be understood as fluctuations in sound energy that are perceptible to the human ear — see the "Sound Characteristics" sub-section.
The ‘5% exceeded’ value (i.e., the 95th percentile) is commonly used as an aggregate indicator for the ‘overall’ value of a time-varying SQM. There remains debate about time-varying SQM aggregation, and ongoing research into how this may accurately reflect human sensory impression [59]; differing approaches are in current use (e.g., [64]).
This form of ‘annoyance’ is conceptually similar to what Kryter termed ‘perceived noisiness’ [81] — that is, the ‘unwantedness’ or ‘unacceptability’ of a sound to an individual, based solely on perception of its acoustic features, and not on the conveyance of its meaning or broader implications for behavioural interference, such as emotional feelings of intrusion (etc), which might otherwise be evoked by introducing consideration of the exposure context. Although the term applied by Kryter to this notion could be accused of conflating the perceptual and affective components of psychological processing, it does appear that Kryter intended for the concept to be considered more as a sensation than as an affective response [82]. Further discussion on distinctions between ‘noisiness’ and (contextualised) noise annoyance can be found in ref [83].
A binary outcome measure derived from dichotomous classification of annoyance ratings.
Data from ref [71] has been adjusted to \(L_{\textrm{AE}}\) according to reported stimuli duration.
Although the model for psychoacoustic annoyance is often attributed to Zwicker (likely due to its publication in ref [54]), it seems that during doctoral research under the supervision of Prof. Hugo Fastl, Widmann developed the ‘psychoacoustic’ annoyance model from the ‘unbiased’ annoyance concept proposed earlier and piloted by Zwicker [85] — see footnote 10. Both models clearly originate from the so-called ‘Munich school’ led by Zwicker and Fastl.
The unbiased annoyance proposed by Zwicker is similar to psychoacoustic annoyance but includes consideration of the modifying influence of the time of day (a contextual factor). Further discussion on the distinctions between various noise annoyance concepts can be found in ref [86].
Also commonly termed ‘non-acoustic’ factors, although some of the factors considered, such as the ambient soundscape at the listening location, have acoustic dimensions; hence, this term is not used here.
The EU \(L_{\textrm{den}}\) metric definition allows some flexibility over the precise diurnal periods used in its calculation, according to individual national custom.
References
PwC. Advanced air mobility: UK economic impact study; 2023. Available from: https://www.pwc.co.uk/issues/emerging-technologies/drones/uk-economic-aam-report-2023.html.
PwC. Skies without limits v2.0; 2022. Available from: https://www.pwc.co.uk/issues/emerging-technologies/drones/the-impact-of-drones-on-the-uk-economy.html.
Eißfeldt H, Vogelpohl V. Drone acceptance and noise concerns — some findings. 20th International Symposium on Aviation Psychology, Dayton, US, 7–10 May 2019. Available from: https://corescholar.libraries.wright.edu/isap_2019/34.
McKinsey & Company. Study on the societal acceptance of urban air mobility in Europe; 2021. Available from: https://www.easa.europa.eu/en/full-report-study-societal-acceptance-urban-air-mobility-europe.
Marshall B, Easdown C, Day H, Camilleri E, Roelcke P. Technology tracker: wave 9. Report prepared for the Department for Transport. Ipsos; 2022. 22-030135-01. Available from: https://www.gov.uk/government/publications/transport-and-transport-technology-public-attitudes-tracker#full-publication-update-history.
Smith A, Dickinson JE, Marsden G, Cherrett T, Oakey A, Grote M. Public acceptance of the use of drones for logistics: the state of play and moving towards more informed debate. Technol Soc. 2022;2022(68):101883. https://doi.org/10.1016/j.techsoc.2022.101883.
Bajde D, Woermann N, Bruun MH, Gahrn-Andersen R, Sommer JK, Nøjgaard M, et al. Public reactions to drone use in residential and public areas. University of Southern Denmark / Aalborg University; 2017. Available from: https://vbn.aau.dk/en/publications/public-reactions-to-drone-use-in-residential-and-public-areas.
Torija AJ, Clark C. A psychoacoustic approach to building knowledge about human response to noise of unmanned aerial vehicles. Int J Environ Res Public Health. 2021;18(2):682. https://doi.org/10.3390/ijerph18020682.
Rizzi SA, Huff DL, Boyd Jr DD, Bent P, Henderson BS, Pascioni KA, et al. Urban air mobility noise: current practice, gaps, and recommendations. NASA; 2020. NASA/TP-2020-5007433. Available from: https://ntrs.nasa.gov/citations/20205007433.
Schäffer B, Pieren R, Heutschi K, Wunderli JM, Becker S. Drone noise emission characteristics and noise effects on humans – a systematic review. Int J Environ Res Public Health. 2021;18(11):5940. https://doi.org/10.3390/ijerph18115940.
EASA. Open category — civil drones. European Union Aviation Safety Agency. Available from: https://www.easa.europa.eu/en/domains/civil-drones/drones-regulatory-framework-background/open-category-civil-drones.
EASA. Guidelines on noise measurement of unmanned aircraft systems lighter than 600 kg. Operating in the specific category (low and medium risk). Public consultation. European Union Aviation Safety Agency. Available from: https://www.easa.europa.eu/en/document-library/product-certification-consultations/guidelines-noise-measurement-unmanned-aircraft.
FAA. Unmanned aircraft system (UAS) or drone operations. Federal Aviation Administration. Available from: https://www.faa.gov/hazmat/air_carriers/operations/drones.
CAA. Rules and categories of drone flying: information on the rules and regulations of UK drone flying. Civil Aviation Authority. Available from: https://www.caa.co.uk/drones/rules-and-categories-of-drone-flying.
ISO. (Draft) ISO/FDIS 5305 Noise measurements for UAS (unmanned aircraft systems); 2023. Available from: https://www.iso.org/standard/81111.html.
NLR. Rotorcraft noise modelling method. Netherlands Aerospace Centre; 2021. Available from: https://www.easa.europa.eu/en/research-projects/environmental-research-rotorcraft-noise.
Senzig D, Marsan M. UAS noise certification. In: Inter-noise, Chicago, US, 26–29 August 2018. vol. 258. Institute of Noise Control Engineering; 2018. p. 3718–3726. Available from: https://www.ingentaconnect.com/content/ince/incecp/2018/00000258/00000004/art00080.
Greenwood E, Brentner KS, Rau RF, Ted Gan ZF. Challenges and opportunities for low noise electric aircraft. International Journal of Aeroacoustics. 2022;21(5–7):315–81. https://doi.org/10.1177/1475472X221107377.
Intaratep N, Alexander WN, Devenport WJ, Grace SM, Dropkin A. Experimental study of quadcopter acoustics and performance at static thrust conditions. In: 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May – 1 June, 2016. American Institute of Aeronautics and Astronautics; 2016. p. 2873. Available from: https://doi.org/10.2514/6.2016-2873.
Papa U, Del Core G, Giordano G. Determination of sound power levels of a small UAS during flight operations. In: Inter-noise, Hamburg, Germany, 21–24 August 2016. vol. 253 of INTER-NOISE and NOISE-CON Congress and Conference Proceedings. Institute of Noise Control Engineering; 2016. p. 692–702. Available from: https://www.ingentaconnect.com/content/ince/incecp/2016/00000253/00000008/art00078.
Papa U, Iannace G, Del Core G, Giordano G. Sound power level and sound pressure level characterization of a small unmanned aircraft system during flight operations. Noise & Vibration Worldwide. 2017;48(5–6):67–74. https://doi.org/10.1177/0957456517715344.
Kloet N, Watkins S, Clothier R. Acoustic signature measurement of small multi-rotor unmanned aircraft systems. International Journal of Micro Air Vehicles. 2017;9(1):3–14. https://doi.org/10.1177/1756829316681868.
Cheng G, Herrin D. Noise level prediction of a small UAV using panel contribution analysis. In: Inter-noise, Chicago, US, 26–29 August 2018. vol. 258 of INTER-NOISE and NOISE-CON Congress and Conference Proceedings. Institute of Noise Control Engineering; 2018. p. 6084–6090. Available from: https://www.ingentaconnect.com/content/ince/incecp/2018/00000258/00000001/art00011.
Zawodny NS, Christian A, Cabell R. A summary of NASA research exploring the acoustics of small unmanned aerial systems. Vertical Flight Society. 2018 AHS Technical Meeting on Aeromechanics Design for Transformative Vertical Flight, San Francisco, US, 16–19 January 2018. Available from: https://ntrs.nasa.gov/citations/20180002208.
Tinney CE, Sirohi J. Multirotor drone noise at static thrust. AIAA J. 2018;56(7):2816–26. https://doi.org/10.2514/1.J056827.
Didkovskyi V, Korzhyk O, Kozeruk S, Kozak A, Kostiuk R, Liakhevych S. Noise measurement of the multicopter UAV. In: 2019 IEEE 5th International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kiev, Ukraine, 22–24 October 2019. Institute of Electrical and Electronics Engineers; 2019. p. 67–70. Available from: https://doi.org/10.1109/APUAVD47061.2019.8943922.
Herreman K, Taylor C, Paya Y. Anechoic chamber measurement of an octocopter. In: NOISE-CON, New Orleans, US, 16–18 November 2020. vol. 262 of INTER-NOISE and NOISE-CON Congress and Conference Proceedings. Institute of Noise Control Engineering; 2020. p. 511–518. Available from: https://www.ingentaconnect.com/content/ince/incecp/2020/00000262/00000001/art00060#.
Herreman K. Proposed measurement method for UAV sound levels. In: NOISE-CON, Providence, US, 13–15 June 2016. vol. 252 of INTER-NOISE and NOISE-CON Congress and Conference Proceedings. Institute of Noise Control Engineering; 2016. p. 615–622. Available from: https://www.ingentaconnect.com/content/ince/incecp/2016/00000252/00000002/art00071#.
Callanan J, Iqbal R, Adlakha R, Behjat A, Chowdhury S, Nouh M. Large-aperture experimental characterization of the acoustic field generated by a hovering unmanned aerial vehicle. J Acoust Soc Am. 2021;150(3):2046–57. https://doi.org/10.1121/10.0006369.
Alkmim M, Cardenuto J, Tengan E, Dietzen T, Van Waterschoot T, Cuenca J, et al. Drone noise directivity and psychoacoustic evaluation using a hemispherical microphone array. J Acoust Soc Am. 2022;152(5):2735–45. https://doi.org/10.1121/10.0014957.
Cussen K, Garruccio S, Kennedy J. UAV noise emission – a combined experimental and numerical assessment. Acoustics. 2022;4(2):297–312. https://doi.org/10.3390/acoustics4020018.
Putzu R, Boulandet R, Rutschmann B, Bujard T, Noca F, Guillaume C, et al. Aeroacoustic measurements on a free-flying drone in a WindShaper wind tunnel. In: Quiet Drones, Paris, France, 19–21 October 2020. INCE-Europe; 2020. Available from: https://www.quietdrones.org/conferences/1-quiet-drones-2020/.
Heutschi K, Ott B, Nussbaumer T, Wellig P. Synthesis of real world drone signals based on lab recordings. Acta Acustica. 2020;4(6):24. https://doi.org/10.1051/aacus/2020023.
Wunderli JM, Meister J, Boolakee O, Heutschi K. A method to measure and model acoustic emissions of multicopters. Int J Environ Res Public Health. 2022;20(1):96. https://doi.org/10.3390/ijerph20010096.
Zhou T, Jiang H, Huang B. Quad-copter noise measurements under realistic flight conditions. Aerosp Sci Technol. 2022;2022(124):107542. https://doi.org/10.1016/j.ast.2022.107542.
Zhang Y, Lee I, Lin D. Measurement of noise from a moving drone using a phased array microphone system. 2017 Asia-Pacific International Symposium on Aerospace Technology, Seoul, Korea, 16–18 October 2017. Available from: https://www.researchgate.net/publication/326697206_Measurement_of_Noise_from_a_Moving_Drone_Using_a_Phased_Array_Microphone_System.
Humphreys WM, Lockard DP, Khorrami MR, Culliton W, McSwain R, Ravetta PA, et al. Development and calibration of a field-deployable microphone phased array for propulsion and airframe noise flyover measurements. American Institute of Aeronautics and Astronautics. 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May – 1 June, 2016. Available from: https://doi.org/10.2514/6.2016-2898.
Alexander WN, Whelchel J. Flyover noise of multi-rotor sUAS. In: Inter-noise, Madrid, Spain, 16–19 June 2019. vol. 259 of INTER-NOISE and NOISE-CON Congress and Conference Proceedings. Institute of Noise Control Engineering; 2019. p. 2548–2558. Available from: https://www.ingentaconnect.com/content/ince/incecp/2019/00000259/00000007/art00059.
Read DR, Senzig DA, Cutler CJ, Elmore E, He H. Noise measurement report: unconventional aircraft — Choctaw Nation of Oklahoma: July 2019. John A. Volpe National Transportation Systems Center; 2020. DOT-VNTSC-FAA-20-03 DOT/FAA/AEE/2020-04. Available from: https://rosap.ntl.bts.gov/view/dot/49647.
Hui CTJ, Kingan MJ, Hioka Y, Schmid G, Dodd G, Dirks KN, et al. Quantification of the psychoacoustic effect of noise from small unmanned aerial vehicles. Int J Environ Res Public Health. 2021;18(17):8893. https://doi.org/10.3390/ijerph18178893.
Konzel N, Greenwood E. Ground-based acoustic measurements of small multirotor aircraft. Vertical Flight Society. Vertical Flight Society’s 78th Annual Forum & Technology Display, Fort Worth, US, 10–12 May 2022. Available from: https://doi.org/10.4050/F-0078-2022-17435.
Cutler-Wood C, Barzach M, Downs R, Hobbs CM, Shirayama S. Estimating unmanned aircraft takeoff noise using hover measurement data. INCE-Europe. Quiet Drones, Internet, 27–30 June 2022. Available from: https://www.quietdrones.org/conferences/2-quiet-drones-2022/.
Ramos-Romero C, Green N, Torija AJ, Asensio C. On-field noise measurements and acoustic characterisation of multi-rotor small unmanned aerial systems. Aerosp Sci Technol. 2023;2023(141):108537. https://doi.org/10.1016/j.ast.2023.108537.
Valente VT, Greenwood E, Johnson EN. An experimental investigation of eVTOL flight state variance on noise. Vertical Flight Society. Vertical Flight Society’s 79th Annual Forum and Technology Display, West Palm Beach, US, 16–18 May 2023. Available from: https://doi.org/10.4050/F-0079-2023-17951.
Lieb TJ, Treichel J, Volkert A. Noise measurements of unmanned aircraft vehicles: experiences, challenges and recommendations for standards taken from flight trials. In: 2023 Integrated Communication, Navigation and Surveillance Conference (ICNS), Herndon, US, 18–20 April 2023. Institute of Electrical and Electronics Engineers; 2023. p. 1–7. Available from: https://doi.org/10.1109/ICNS58246.2023.10124257.
ISO. ISO 3745:2012 Acoustics — determination of sound power levels and sound energy levels of noise sources using sound pressure — precision methods for anechoic rooms and hemi-anechoic rooms; 2012. Available from: https://www.iso.org/standard/45362.html.
Blanchard T, Thomas JH, Raoof K. Acoustic localization and tracking of a multi-rotor unmanned aerial vehicle using an array with few microphones. J Acoust Soc Am. 2020;148(3):1456–67. https://doi.org/10.1121/10.0001930.
IEC. IEC 61672-1:2013 Electroacoustics — sound level meters — part 1: specifications; 2013. Available from: https://webstore.iec.ch/publication/5708.
Hioka Y, Yen B, McKay R, Kingan M. Clean audio recording using unmanned aerial vehicles. In: Koubaa A, Azar AT, editors. Unmanned aerial systems: theoretical foundation and applications. Advances in Nonlinear Dynamics and Chaos. Elsevier; 2021. p. 175–202. Available from: https://doi.org/10.1016/B978-0-12-820276-0.00015-7.
Ramos Romero C, Torija Martínez AJ, Green N, Asensio C.: DroneNoise database. Available from: https://doi.org/10.17866/rd.salford.22133411.v2.
Boyle D, Page J, Pascioni K. UAM noise working group meeting subgroup 2: ground & flight testing. National Aeronautics and Space Administration. Available from: https://ntrs.nasa.gov/citations/20220005172.
ISO. ISO 3744:2010 Acoustics — determination of sound power levels and sound energy levels of noise sources using sound pressure — engineering methods for an essentially free field over a reflecting plane; 2010. Available from: https://www.iso.org/standard/52055.html.
Rasmussen P, Winberg L. Accurate measurement of drone noise on the ground. In: Quiet Drones, Internet, 27–30 June 2022. INCE-Europe; 2022. Available from: https://www.quietdrones.org/conferences/2-quiet-drones-2022/.
Fastl H, Zwicker E. Psychoacoustics: facts and models. 3rd ed. Springer Series in Information Sciences. Berlin, Germany: Springer-Verlag; 2007. Available from: https://doi.org/10.1007/978-3-540-68888-4.
Genuit K, Sottek R. Das menschliche Gehör und Grundlagen der Psychoakustik (Human hearing and the basics of psychoacoustics). In: Genuit K, editor. Sound-Engineering im Automobilbereich (Sound engineering in the automotive sector). Berlin, Germany: Springer-Verlag; 2010. p. 39–88. Available from: https://doi.org/10.1007/978-3-642-01415-4_2.
ETSU working group on noise from wind turbines. The assessment and rating of noise from wind farms. Energy Technology Support Unit; 1996. ETSU-R-97. Available from: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/49869/ETSU_Full_copy__Searchable_.pdf.
ISO. ISO 1996-2:2017 Acoustics — description, measurement and assessment of environmental noise — part 2: determination of sound pressure levels; 2017. Available from: https://www.iso.org/standard/59766.html.
BSI. BS 4142:2014+A1:2019 Methods for rating and assessing industrial and commercial sound; 2019. Available from: https://knowledge.bsigroup.com/products/methods-for-rating-and-assessing-industrial-and-commercial-sound/standard.
ISO. ISO 532-1:2017 Acoustics — methods for calculating loudness — part 1: Zwicker method; 2017. Available from: https://www.iso.org/standard/63077.html.
ISO. ISO 532-2:2017 Acoustics — methods for calculating loudness — part 2: Moore-Glasberg method; 2017. Available from: https://www.iso.org/standard/63078.html.
ISO. ISO 532-3:2023 Acoustics — methods for calculating loudness — part 3: Moore-Glasberg-Schlittenlacher method; 2023. Available from: https://www.iso.org/standard/69856.html.
DIN. DIN 45692:2009-08 Messtechnische Simulation der Hörempfindung Schärfe (Measurement technique for the simulation of the auditory sensation of sharpness); 2009. Available from: https://www.beuth.de/en/standard/din-45692/117635111.
Ecma International. ECMA-418-1:2022 Psychoacoustic metrics for ITT equipment — part 1 (prominent discrete tones); 2022. Available from: https://www.ecma-international.org/publications-and-standards/standards/ecma-418/.
Ecma International. ECMA-418-2:2022 Psychoacoustic metrics for ITT equipment — part 2 (models based on human perception); 2022. Available from: https://www.ecma-international.org/publications-and-standards/standards/ecma-418/.
Torija Martínez AJ, Li Z. Metrics for assessing the perception of drone noise. European Acoustics Association. Forum Acusticum 2020, Lyon, France, 20–24 April 2020. Available from: https://dx.doi.org/10.48465/fa.2020.0018.
Boucher MA, Rafaelof M, Begault D, Christian AW, Krishnamurthy S, Rizzi SA. A psychoacoustic test for urban air mobility vehicle sound quality. SAE International. SAE Noise and Vibration Conference and Exhibition, Grand Rapids, US, 15–18 May 2023. Available from: https://doi.org/10.3397/NC_2023_01_1107.
Bechtold B. Violin plots for Matlab, Github project. Available from: https://github.com/bastibe/Violinplot-Matlab.
Christian A, Cabell R. Initial investigation into the psychoacoustic properties of small unmanned aerial system noise. American Institute of Aeronautics and Astronautics. 23rd AIAA/CEAS Aeroacoustics Conference, Denver, US, 5–9 June 2017. Available from: https://doi.org/10.2514/6.2017-4051.
Rizzi SA, Palumbo DL, Rathsam J, Christian AW, Rafaelof M. Annoyance to noise produced by a distributed electric propulsion high-lift system. American Institute of Aeronautics and Astronautics. 23rd AIAA/CEAS Aeroacoustics Conference, Denver, US, 5–9 June 2017. Available from: https://doi.org/10.2514/6.2017-4050.
Huber S, Wellig P, Heutschi K. Determination of the detection-threshold of human observers in acoustic drone detection. In: Stein KU, Schleijpen R, editors. Conference on Target and Background Signatures V, Strasbourg, France, 9–10 September 2019. vol. 11158 of Proceedings of SPIE; 2019. Available from: https://doi.org/10.1117/12.2533174.
Gwak DY, Han D, Lee S. Sound quality factors influencing annoyance from hovering UAV. J Sound Vib. 2020;489:115651. https://doi.org/10.1016/j.jsv.2020.115651.
Torija AJ, Li ZG, Self RH. Effects of a hovering unmanned aerial vehicle on urban soundscapes perception. Transportation Research Part D-Transport and Environment. 2020;2020(78):102195. https://doi.org/10.1016/j.trd.2019.11.024.
Aalmoes R, Lania HA, Choi J. Determination of a human dose-response with respect to single events of urban air mobility-type vehicles. Royal Netherland Aerospace Centre; 2021. EASA.FC06.SC02.D1. Available from: https://www.easa.europa.eu/en/downloads/137148/en.
Torija AJ, Li ZG, Chaitanya P. Psychoacoustic modelling of rotor noise. J Acoust Soc Am. 2022;151(3):1804–15. https://doi.org/10.1121/10.0009801.
Torija AJ, Nicholls RK. Investigation of metrics for assessing human response to drone noise. Int J Environ Res Public Health. 2022;19(6):3152. https://doi.org/10.3390/ijerph19063152.
Aalmoes R, de Bruijn B, Sieben N. The influence of contextual non-auditory factors on drone sound perception. SAE International. SAE Noise and Vibration Conference & Exhibition, Grand Rapids, US, 15–18 May 2023. Available from: https://doi.org/10.3397/NC_2023_01_1105.
Green N, Ramos-Romero C, Torija Martínez A. Advances in the measurement and human response to noise of unmanned aircraft systems. SAE International. SAE Noise and Vibration Conference and Exhibition, Grand Rapids, US, 15–18 May 2023. Available from: https://doi.org/10.3397/NC_2023_01_1108.
Krishnamurthy S, Rizzi S, Biziorek R, Czech J, Berg J, Tannler D, et al. Remotely administered psychoacoustic test for sUAS noise to gauge feasibility of remote UAM noise study. SAE International. SAE Noise and Vibration Conference and Exhibition, Grand Rapids, US, 15–18 May 2023. Available from: https://doi.org/10.3397/NC_2023_01_1106.
Stalnov O, Faran M, Koral Y, Furst M. Auditory detection probability of propeller noise in hover flight in presence of ambient soundscape. J Acoust Soc Am. 2022;151(6):3719–28. https://doi.org/10.1121/10.0011546.
DIN. DIN 45631/A1:2010-03 Berechnung des Lautstärkepegels und der Lautheit aus dem Geräuschspektrum — Verfahren nach E. Zwicker — Änderung 1: Berechnung der Lautheit zeitvarianter Geräusche (Calculation of loudness level and loudness from the sound spectrum — Zwicker method — Amendment 1: calculation of the loudness of time-variant sound); 2010. Available from: https://www.beuth.de/en/standard/din-45631-a1/122476084.
Kryter KD. The effects of noise on man. 2nd ed. London, UK: Academic Press; 1985.
Kryter KD. Perception of noisiness. In: NOISE-CON, Tarrytown, US, 14–16 July 1991. INTER-NOISE and NOISE-CON congress and conference proceedings. Institute of Noise Control Engineering; 1991. p. 29–42. Available from: https://www.ingentaconnect.com/content/ince/incecp/1991/00001991/00000001/art00003#.
Berglund B, Berglund U, Lindvall T. Scaling loudness, noisiness, and annoyance of aircraft noise. J Acoust Soc Am. 1975;57(4):930–4. https://doi.org/10.1121/1.380535.
Widmann U. Ein Modell der Psychoakustischen Lästigkeit von Schallen und seine Anwendung in der Praxis der Lärmbeurteilung (A model of the psychoacoustic annoyance of sounds and its application in noise assessment practice) [Doctoral thesis]; 1992.
Zwicker E. On the dependence of unbiased annoyance on loudness. In: Inter-noise, Newport Beach, US, 4–6 December 1989. INTER-NOISE and NOISE-CON congress and conference proceedings. Institute of Noise Control Engineering; 1989. p. 809–814. Available from: https://www.ingentaconnect.com/content/ince/incecp/1989/00001989/00000002/art00056.
Maschke C, Jakob A. Psychoakustische Messtechnik (Psychoacoustic measurement technology). In: Möser M, editor. Messtechnik der Akustik (Measurement technology of acoustics). Berlin, Germany: Springer-Verlag; 2010. p. 599–642. Available from: https://doi.org/10.1007/978-3-540-68087-1.
More S, Davies P. Development of a model to predict annoyance caused by aircraft noise. Institute of Noise Control Engineering. Inter-noise, Lisbon, Portgual, 13–16 June 2010. Available from: https://www.ingentaconnect.com/content/ince/incecp/2010/00002010/00000007/art00040.
Job RFS. Impact and potential use of attitude and other modifying variables in reducing community reaction to noise. Transportation Research Record. 1991;Energy and environmental issues 1991(1312):109–115.
Crichton F, Dodd G, Schmid G, Gamble G, Cundy T, Petrie KJ. The power of positive and negative expectations to influence reported symptoms and mood during exposure to wind farm sound. Health Psychol. 2014;33(12):1588–92. https://doi.org/10.1037/hea0000037.
Tonin R, Brett J, Colagiuri B. The effect of infrasound and negative expectations to adverse pathological symptoms from wind farms. Journal of Low Frequency Noise, Vibration and Active Control. 2016;35(1):77–90. https://doi.org/10.1177/0263092316628257.
Fidell S, Mestre V, Schomer P, Berry B, Gjestland T, Vallet M, et al. A first-principles model for estimating the prevalence of annoyance with aircraft noise exposure. The Journal of the Acoustical Society of America. 2011;130(2):791–806. https://doi.org/10.1121/1.3605673.
Miller NP, Czech JJ, Hellauer KM, Nicholas BL, Lohr S, Jodts E, et al. Analysis of the neighborhood environmental survey. Harris Miller Miller & Hanson / Westat; 2021. DOT/FAA/TC-21/4. Available from: https://www.faa.gov/regulations_policies/policy_guidance/noise/survey.
ICAO. Annex 16 to the convention on international civil aviation — environmental protection. Volume 1 — aircraft noise; 2008. Available from: https://elibrary.icao.int/explore;themeName=Blue-Theme/product-details/289652.
Filippone A. Aircraft noise prediction. Prog Aerosp Sci. 2014;2014(68):27–63. https://doi.org/10.1016/j.paerosci.2014.02.001.
European Commission. Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on unmanned aircraft systems and on third-country operators of unmanned aircraft systems. European Commission,. Official Journal of the European Union. Available from: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:32019R0945.
European Commission. Commission Delegated Regulation (EU) 2020/1058 of 27 April 2020 amending Delegated Regulation (EU) 2019/945 as regards the introduction of two new unmanned aircraft systems classes. Official Journal of the European Union. Available from: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A32020R1058.
Treichel J, Foerster J, Volkert A, Lieb TJ. Applicability of ISO standard 3744 to UA. In: Conference Proceedings of the EUROREGIO BNAM Joint Acoustics Conference, Aalborg, Denmark, 9–11 May 2022. European Acoustics Association; 2022. p. 187–193. Available from: https://bnam2022.org/proceedings.
FAA. Noise certification standards: Matternet Model M2 aircraft. Federal Aviation Administration; 2022. 2022-19639. Available from: https://www.federalregister.gov/documents/2022/09/12/2022-19639/noise-certification-standards-matternet-model-m2-aircraft.
FAA. Noise certification of UAS/AAM using rules of particular applicability. Federal Aviation Administration. Available from: https://www.faa.gov/about/office_org/headquarters_offices/apl/aee/noise/uas_noise_certification.
US Federal Government. US Code of Federal Regulations Title 14, Subchapter C, Part 36, Appendix J to Part 36 — Alternative noise certification procedure for helicopters under Subpart H having a maximum certificated takeoff weight of not more than 7,000 pounds. National Archives and Records Administration Office of the Federal Register. Available from: https://www.ecfr.gov/current/title-14/chapter-I/subchapter-C/part-36/appendix-Appendix%20J%20to%20Part%2036.
EASA. Consultation paper: environmental protection technical specifications applicable to eVTOL powered by multiple, vertical, non-tilting, evenly distributed rotors. European Union Aviation Safety Agency; 2023. Available from: https://www.easa.europa.eu/en/document-library/product-certification-consultations/consultation-paper-environmental-protection.
Torija AJ, Roberts S, Woodward R, Flindell IH, McKenzie AR, Self RH. On the assessment of subjective response to tonal content of contemporary aircraft noise. Appl Acoust. 2019;2019(146):190–203. https://doi.org/10.1016/j.apacoust.2018.11.015.
Robinette B, Divens J. Noise assessment for Wing Aviation proposed package delivery operations in Frisco and Little Elm, Texas: In support of U.S. Code of Federal Regulations Title 14, Part 135. Harris Miller Miller & Hanson; 2021. 309990.003-2.
FAA. Final environmental assessment and finding of no significant impact/record of decision — Amazon Prime air drone package delivery operations in College Station, Texas. US Department of Transportation Federal Aviation Administration; 2022. Available from: https://www.faa.gov/sites/faa.gov/files/FONSI-ROD_Final-EA-Amazon-Prime-Air_College-Station-TX.pdf.
FAA. Fundamentals of noise and sound. Federal Aviation Administration. Available from: https://www.faa.gov/regulations_policies/policy_guidance/noise/basics.
CAA. Survey of noise attitudes 2014: aircraft noise and annoyance, Second Edition. Civil Aviation Authority Environmental Research and Consultancy Department; 2021. CAP 1506. Available from: https://publicapps.caa.co.uk/modalapplication.aspx?appid=11 &mode=detail &id=7744.
WHO Regional Office for Europe. Environmental noise guidelines for the European region. World Health Organization Regional Office for Europe; 2018. ISBN 978-92-8-905356-3. Available from: https://www.who.int/europe/publications/i/item/9789289053563.
FAA. Advanced air mobility (AAM) implementation plan. Federal Aviation Administration; 2023. Available from: https://www.faa.gov/air-taxis/implementation-plan.
CAA. Airspace modernisation strategy 2023–2040 — part 1: strategic objectives and enablers. Civil Aviation Authority; 2023. CAP 1711. Available from: https://publicapps.caa.co.uk/modalapplication.aspx?appid=11 &mode=detail &id=8960.
Elsayed M, Moataz M. The impact of airspace regulations on unmanned aerial vehicles in last-mile operation. Transp Res Part D: Transp Environ. 2020;2020(87):102480. https://doi.org/10.1016/j.trd.2020.102480.
Ackerman E, Strickland E. Medical delivery drones take flight in east Africa. IEEE Spectr. 2018;55(1):34–5. https://doi.org/10.1109/MSPEC.2018.8241731.
Smith MG, Cordoza M, Basner M. Environmental noise and effects on sleep: an update to the WHO systematic review and meta-analysis. Environ Health Perspect. 2022;130(7):076001. https://doi.org/10.1289/EHP10197.
Clark C, Crumpler C, Notley H. Evidence for environmental noise effects on health for the United Kingdom policy context: a systematic review of the effects of environmental noise on mental health, wellbeing, quality of life, cancer, dementia, birth, reproductive outcomes, and cognition. Int J Environ Res Public Health. 2020;17(2):393. https://doi.org/10.3390/ijerph17020393.
Thompson R, Smith RB, Bou Karim Y, Shen C, Drummond K, Teng C, et al. Noise pollution and human cognition: an updated systematic review and meta-analysis of recent evidence. Environ Int. 2022;2022(158):106905. https://doi.org/10.1016/j.envint.2021.106905.
Chen X, Liu M, Zuo L, Wu X, Chen M, Li X, et al. Environmental noise exposure and health outcomes: an umbrella review of systematic reviews and meta-analysis. Eur J Pub Health. 2023;33(4):725–31. https://doi.org/10.1093/eurpub/ckad044.
Itzkowitz N, Gong X, Atilola G, Konstantinoudis G, Adams K, Jephcote C, et al. Aircraft noise and cardiovascular morbidity and mortality near Heathrow Airport: a case-crossover study. Environ Int. 2023;2023(177):108016. https://doi.org/10.1016/j.envint.2023.108016.
Gong X, Fenech B, Blackmore C, Chen Y, Rodgers G, Gulliver J, et al. Association between noise annoyance and mental health outcomes: a systematic review and meta-analysis. Int J Environ Res Public Health. 2022;19(5):2696. https://doi.org/10.3390/ijerph19052696.
Ardelean IC, Usov D, Filippone A, Parslew B, Hollingsworth P. Unmanned wingless rotorcraft scaling. J Aircr. 2023;60(5):1553–63. https://doi.org/10.2514/1.C037299.
Acknowledgements
The authors would like to acknowledge the funding provided by the UK Engineering and Physical Sciences Research Council for the DroneNoise project (EP/V031848/1), and by UK Research and Innovation (UKRI) under the UK government’s Horizon Europe funding guarantee (REFMAP project, grant number 10061935). The authors would like to thank the article reviewer for constructive suggestions. MJBL would like to acknowledge the collaboration with Matt Torjussen (ANV Measurement Systems) in developing sound quality analysis tools, and Prof. Roland Sottek (HEAD Acoustics) for assistance with technical information on ECMA standardised methods.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors have no competing interests to declare that are relevant to the content of this article.
Human and Animal Rights and Informed Consent
This article does not contain any studies with animal subjects performed by any of the authors. Informed consent of all human participants involved in experiments described in this article that were performed by the authors was obtained prior to undertaking the experiments.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Lotinga, M.J.B., Ramos-Romero, C., Green, N. et al. Noise from Unconventional Aircraft: A Review of Current Measurement Techniques, Psychoacoustics, Metrics and Regulation. Curr Pollution Rep 9, 724–745 (2023). https://doi.org/10.1007/s40726-023-00285-4
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40726-023-00285-4
Keywords
- Unconventional aircraft
- Advanced air mobility
- Urban air mobility
- Unmanned aircraft systems
- Unmanned aerial vehicles
- Remotely piloted aircraft systems
- Environmental noise
- Aviation noise
- Soundscapes
- Acoustic measurements
- Acoustic characterisation
- Psychoacoustics
- Sound quality
- Human response to noise
- Noise metrics
- Noise regulation