
Abstract
The inter-comparison of ground gravity measurements and vertical surface displacements enables to better understand the structure, dynamics and evolution of the Earth’s system. Within this research we analyzed the Global Positioning System vertical position time series acquired in the vicinity of the superconducting gravimeters. We estimated of noise character of GPS and SG by comparison of the satellite and terrestrial measurements collected at 18 globally distributed neighboring sites. The comparable results were provided by applying the appropriate and corresponding models of geophysical phenomena to obtain residual time series, and by unifying the sampling rate since the noise characteristics may depend on it. The deterministic part of the series was assumed to follow the Polynomial Trend Model and was subtracted prior to noise analysis. Then, a combination of power-law and white noise was presumed and the Maximum Likelihood Estimation implemented in the Hector software to investigate the stochastic part was applied. Within the paper, we show that the spectral indices for all SG time series fall in the area of fractional Brownian motion (− 2 < κ < − 1), while GPS data are best characterized by fractional Gaussian noises (− 1 < κ < 0). The estimated ratio between spectral indices of GPS and SG is stable worldwide with a global median value of about 0.5. Concerning the power-law amplitudes, these are very consistent worldwide for the GPS position time series and fluctuate around 15 mm/year−κ/4, while in the case of SG records they spread between 60 and 300 nm/s2/year−κ/4. The fraction of power-law noise employed in the assumed combination is equal to 100% for almost all SG stations, while in case of GPS it varies between 26.1 and 99.9%. The main finding of this research is that the assumption of power-law noise is much more preferred for SG data than the assumption of a pure white noise being used until now.
Similar content being viewed by others

1 Introduction
The primary goals of geodesy are to describe the Earth’s size and shape, to provide spatial referencing and to determine its external gravity field. The first two tasks are met with the use of Global Positioning System (GPS). Kinematic reference frames (e.g. Altamimi et al. 2016) or many of the geophysical interpretations (e.g. Segall and Davis 1997; Kreemer et al. 2014) are all being realized based on the GPS time series. Due to their high precision and long-term stability the superconducting gravimeters (SG) can be employed to fulfill the third goal, so to study geophysical phenomena over a wide frequency range from seismic modes to the long-period Chandler wobble (e.g. Hinderer and Crossley 2000; Hinderer et al. 2007). Vertical displacements and time-varying gravity changes represent various deformation mechanisms of the Earth. The inter-comparison of ground gravity measurements and vertical surface displacements enables to better understand the structure, dynamics and evolution of the Earth’s system and is within the interests of the International Association of Geodesy (IAG) through its Joint Study Group on Intercomparison of Gravity and Height Changes (Drewes et al. 2016). Particularly, comparison of the gravity records to the height changes helps to discriminate vertical motion from mass transfer. Among others, Richter et al. (2004) and Rosat et al. (2009) compared the height changes registered by GPS with SG data and indicated the existence of common seasonal signals partly explained by local hydrological effect. Also, nearby located GPS and SG measurements allow to separate the past and present-day ice melting (e.g. Omang and Kierulf 2011; Olsson et al. 2015) or to analyse the geocenter motion (Rogister et al. 2016). However, several issues arise when GPS geometric measurements of surface deformation are compared to gravity records. Differences in spatial and temporal scales, along with disagreement in sensitivity and noise characteristics have to be mentioned here.
Noises in geophysical time series were analyzed through the last 25 years. Initially, Agnew (1992) emphasized that almost all geophysical phenomena follow a power-law behavior, which has a character of colored noises with an integer or non-integer spectral index, which is an exponent of the frequency in relationship between power spectrum and the temporal frequency (Mandelbrot and Van Ness 1968). The first are − 2, − 1 or 0, that denote, respectively, a random-walk, flicker and white noise. Random-walk is a mixture of local station-dependent effects and monument instability. Flicker noise includes all mismodelled parameters during data processing as well as large-scale effects, while white noise represents temporally uncorrelated phenomena. Non-integer spectral indices include fractional Brownian motion with the spectral index varying between random-walk and flicker noise or fractional Gaussian noises for spectral indices falling between flicker and white noise (Mandelbrot and Van Ness 1968). Any assumed noise model affects the errors of rates (changes in time) estimated from any data (Williams 2003). Noises in GPS observations have already been widely discussed in the papers by Zhang et al. (1997), Mao et al. (1999), Williams et al. (2004), Amiri-Simkooei et al. (2007), Teferle et al. (2008), Bos et al. (2008), Santamaria-Gomez et al. (2011) or Klos et al. (2015). Concerning gravimetric observations, Banka and Crossley (1999) compared several continuously recording instruments: SGs, spring gravimeters and seismometers to determine noise characteristics. They statistically averaged the observations to obtain and investigate power spectral density (PSD) of the noise in the frequency band from 0.05 to 20 mHz. Rosat et al. (2004) extended this noise level study to tidal frequencies. They particularly showed that SGs perform better than seismometers below 1 mHz. The noise levels of the various SG sites can be also found in the publication by Rosat and Hinderer (2011). Of course it is very difficult to distinguish between signal and noise, since the noise is also a signal. In this approach signal is what can be computed from a functional model and noise is what cannot be modelled by this way.
In this paper, we provide the estimates of GPS and SG noise characteristics by comparing satellite and terrestrial measurements collected at 18 globally distributed neighboring sites. We employ the combination of power-law and white noise and prove that it is much more preferred than the white noise only to describe both kinds of data, while showing a clear difference in both stochastic parts. We start with a description of both datasets employed, continue with the pre-processing methodology and end with the detailed characterization of power-law noises present in both types of series, showing that a power-law assumption of noises gives more appropriate estimates than a pure white noise.
2 Data and pre-processing
We accessed the GPS solutions processed at the Nevada Geodetic Laboratory (http://geodesy.unr.edu/) with Precise Point Positioning (PPP, Zumberge et al. 1997) mode and expressed in IGS08 (Rebischung et al. 2012) reference frame. Then, the standard pre-processing for detection and elimination of outliers, offsets and small gaps was carried out, which is usually a subject of researcher expertise and applied methods (Gazeaux et al. 2013; Klos et al. 2016). The outliers were removed with an approach based on a threshold of 3 times the Interquartile Range (IQR; Langbein and Bock 2004), while the epochs of offsets (mostly caused by technical operations) were employed directly from the log-files of stations. Also, a manual inspection of time series was performed to recognize offsets of unknown reason. Figure 1 and Table 1 present the locations and technical data, respectively of the neighboring GPS-SG sites employed in this research along with the time spans of both datasets. As neighboring sites, we mean stations situated closest possible to each other, however, not being collocated and tied by geodetic measurements. In this research, we consider only the noise content of vertical GPS positions.

The layout of 18 neighboring GPS-SG stations employed in the analysis
The 1-min gravimetric data level-1 products of IGETS (International Geodynamics and Earth Tide Service, http://igets.u-strasbg.fr/) were downloaded from GFZ ISDC (Geo Forschungs Zentrum Information System and Data Centre, Voigt et al. 2016). We performed a standard pre-processing of small gaps, offsets and spikes as described in Hinderer et al. (2002): we removed a local tidal model (obtained from the results of previous ETERNA 3.4 tidal analysis of the SG data) from the raw 1-min SG data, linearly interpolate gaps and replace spikes (like large earthquakes). Large offsets of instrumental origin were manually corrected using TSoft software (Van Camp and Vauterin 2005). The tidal model previously removed was then added back to the data.
To compare the changes in height to the changes in gravity, following tasks need to be taken into consideration. The first one is to apply the appropriate models of geophysical phenomena. Based on a tidal model for each individual SG station, the solid Earth tides were subtracted using inelastic Earth’s model (Dehant et al. 1999) and HW tidal potential catalogue (Hartmann and Wenzel 1995) plus latitude and frequency dependencies (FCN resonance in the diurnal band) computed using the PREDICT module of ETERNA 3.4 software (Wenzel 1996). We also subtracted the solid pole tide using IERS (International Earth Rotation and Reference Systems Service) polar motion coordinates with a gravimetric factor of 1.16 and oceanic loading effect using FES2004 (Lyard et al. 2006). We did not correct SG observations for environmental loadings to be consistent with GPS. The second task is to concern and unify the time series sampling rate. It is widely acknowledged, that noise characteristics may depend on sampling rate (Williams 2003). GPS-derived coordinates are rated every 24 h, while superconducting gravimeters record once every second, but are decimated to a 1-min sampling interval after a low-pass filtering using either a digital filter provided by the GWR manufacturer or a home-made one. The use of different decimation filters would affect the PSD slopes around the Nyquist frequency (c.a. 2 min), but will not affect them at the lower frequencies we are looking at, since we further decimate in the following using the same digital filters. To ensure comparable results, we performed the down-sampling of gravimetric data going from 1 min to 1 h data using least-squares low-pass filtering and a cut-off frequency of 0.138 mHz, which corresponds to 2 h. Then, we employed a simple moving average method with unit weighting to end with daily data. We are aware that a large amount of information has been lost since many environmental effects are related to the sub-daily variations, and noise results may be slightly affected by the different sampling rate. However in this way, both GPS position time series and gravity records had a daily sampling interval, meaning that the results are comparable each other and the interest of our research is concentrated on the frequencies from close to 0 to 182.625 cpy (cycles per year), i.e. periods from 2 days to the infinity.
3 Methods
The GPS position time series and gravity records can be described as the sum of:
-
1.
long-term trend and seasonal changes, which constitute into a deterministic part, and,
-
2.
stochastic part, or noise, which remains when a deterministic (functional) model has been removed from data.
The non-linear trends in GPS (Bogusz 2015) and SG data (Van Camp and Francis 2006; Bogusz et al. 2013) have already been recognized. The non-linearity for GPS stations may come from dynamics on plate boundaries as well as the system artefacts. In superconducting gravity records, it can be caused by irregular instrumental drift from capacitance bridge, magnetic (instrumental) variations, gas adsorption on the levitating sphere, or helium gas pressure variations plus uncorrected small steps arising from local hydrosphere co-seismic event or instrumental disturbance as well as the tectonic movement (Van Camp and Francis 2006). In the following research, we estimated the non-linear trend in GPS and SG data using polynomials of 4th order as they perform better than any other method which may significantly bias the spectral content of the residuals (Klos et al. 2018).
Beyond the linear or non-linear trend, GPS-SG station couples are also influenced by seasonal changes. Among possible reasons of seasonal changes in gravimetric time series, Boy and Hinderer (2006) described the contribution of solid Earth and pole tides, as well as ocean, atmospheric and continental water loadings into gravitational changes recorded at 20 globally distributed SGs of the Global Geodynamics Project (GGP, Crossley and Hinderer 2008; in 2015 GGP was transformed into IGETS). They confirmed that a large part of seasonal signals arises from changes in continental water storage. Concerning the GPS position changes, Dong et al. (2002) grouped the potential contributors to seasonal variations into three categories:
-
1.
surface mass redistribution (atmosphere, ocean, snow, and soil moisture),
-
2.
pole tide,
-
3.
various errors (bedrock thermal expansion, errors in orbit, phase center, and troposphere models, or differences in software) causing artificial oscillations.
The artefacts in GPS position time series were widely described in the papers by Penna and Stewart (2003) or Agnew and Larson (2007). Based on the idea formulated by Bogusz and Klos (2016), we modelled a deterministic part of GPS data including several harmonics of Chandlerian, tropical and draconitic oscillations. For SG data, the same idea was adopted except for draconitics, which are satellite-specific. Having implemented the above-mentioned components of time series, the following deterministic model was fitted to data, also called Polynomial Trend Model (PTM, Bevis and Brown 2014):
where a j is the coefficient of j-th degree of polynomials and n is the number of implemented seasonal harmonic signals with angular velocities of ω. C k and S k denote in-phase and out-of-phase parts, respectively.
Having subtracted the deterministic model from data, the GPS and SG residuals or a so-called “noise”, r GPS and r SG were obtained. Residuals show how well the mathematical model fits original data. More and more realistic or unbiased values of residuals are obtained when all oscillations that we know to be obviously present in GPS or SG data were modelled and removed. In this research, we assumed that the residuals follow a combination of power-law and white noise processes of unspecified spectral index. On the basis of that, the covariance matrix of unknowns is estimated as (Williams et al. 2004):
where a and b are the amplitudes of white and power-law noises, respectively, I is the identity matrix, while J is the covariance matrix for power-law noise of spectral index κ. The contribution of power-law into power-law + white combination given above is called in this paper a “fraction”. Fraction of 0.95 means that power-law noise contributes to 95% in the combination, remaining 5% stands for white. The power-law plus white noise assumption was made in this research, since, as stated by Agnew (1992), most geophysical phenomena follow the power-law noise process. This type of noise has been already found to describe well the GPS position time series with a spectral index close to − 1, meaning the flicker noise (e.g. Williams et al. 2004).
Up to now, the amplitude of noise and its spectral index have been most often estimated with a Maximum Likelihood Estimation (MLE) as proposed by Langbein and Johnson (1997), with an optimal noise model being estimated on the basis of a likelihood function (e.g. Williams et al. 2004). Bos et al. (2013) fastened the MLE process, which resulted in a new implementation in the form of the Hector software for equidistant time series in which data are missing. We employed MLE and solved for the combination of power-law and white noise with unspecified spectral index which is the preferred one for the GPS and SG data considered in this research. Beyond a comparison of the noise parameters derived with MLE, we also delivered the cross-comparison of power spectral densities estimated with the Welch periodogram (Welch 1967), indicating which frequency bands are explained by the power-law behavior the best.
4 Results
The mathematical model used to describe the GPS and SG data was introduced in Eq. (1). Based on this model, we estimated the coefficients of polynomials and amplitudes of seasonal components with MLE, adding a combination of power-law and white noise models. In this section, we provide a detailed description of all parameters estimates.
4.1 Deterministic model
Figure 2 presents 1-day SG and GPS vertical time series collected at Cantley. For both kinds of data, a mathematical model was fitted and presented. Easy to notice is the fact that 4th order of polynomials allows to model the long-term non-linearities as in the case of SG. When the long-term trend has a strictly linear character as it has for GPS, coefficients of polynomials of orders higher than 1 are close to zero, providing a linear velocity.

The time series for gravity records (left) and GPS position data recorded at Cantley (right)
For GPS position time series, all long-term trends had a character of linear velocity ranging from − 7.2 mm/year estimated for MOX2 to 8.0 mm/year estimated for NYAL station. The coefficients of higher orders of polynomials were non-significant. For SG gravity records, the linear trends ranged between − 55.3 nm/s2/year estimated for OS station to 91.1 nm/s2/year estimated for WU station with relative errors a few times higher than in the case of GPS. We did not compare the errors directly, since we did not take the ratio between the gravity variations with its associated vertical displacement of the surface into consideration. It strongly depends on the physical process by which the deformation was caused, in most cases not recognized in details. It varies highly inside loaded areas because of the Newtonian attraction of the local masses and depends on the size of the load (de Linage et al. 2009). For instance, Richter et al. (2004) found a ratio of − 1.6 and − 1.7 nm/s2/mm at Wettzell and Medicina stations in Europe, respectively, corresponding to long-term mass changes. This ratio may range between − 10 nm/s2/mm for hydrological loading and − 1.5 nm/s2/mm for ocean loading (de Linage et al. 2009).
The coefficients of higher orders of polynomials estimated for SG gravity records ranged between − 18.7 and 196.6 nm/s2/year2 for 2nd order, between − 14.3 and 8.2 nm/s2/year3 for 3rd order and between − 64.1 and 3.9 nm/s2/year4 for 4th order for all the stations considered. Polynomials allow approximating the long-term non-linear drift present in SG data with no artificial loss in power except at low frequencies.
4.2 Stochastic part
Table 2 presents spectral indices (κ) which are coefficients defining the slopes of best fits to PSDs presented in a double logarithmic scale, the amplitudes of power-law noises as well as fraction coefficient for each individual site employed in this research. The amplitudes of power-law noises are constant for entire frequency band or, in other words, for entire data. They are defined as the spread of time series around its mean value. The amplitude of certain power-law noise defined by spectral index is computed from the amplitude of white noise, which defines the standard deviation of the residuals. Depending on the type of noise, the amplitude has specific unit: \( \frac{\text{mm}}{{{\text{yr}}^{{{\raise0.7ex\hbox{$\kappa $} \!\mathord{\left/ {\vphantom {\kappa { - 4}}}\right.\kern-0pt} \!\lower0.7ex\hbox{${ - 4}$}}}} }} \) or \( \frac{\text{nm}}{{{\text{s}}^{ 2} \cdot {\text{yr}}^{{{\raise0.7ex\hbox{$\kappa $} \!\mathord{\left/ {\vphantom {\kappa { - 4}}}\right.\kern-0pt} \!\lower0.7ex\hbox{${ - 4}$}}}} }} \) for position and gravity time series, respectively. For gravity time series, the steepest slopes were found for data recorded at Wettzell, Brussels, Metsahovi, Onsala, Canberra and Cantley, while for GPS position time series, the lowest spectral indices were found for Metsahovi and Vienna. These relations are very clearly visible on the histograms of spectral indices (Fig. 4). Spectral indices for all SG time series fall in the area of fractional Brownian motion (− 2 < κ < − 1), while GPS data are best characterized by fractional Gaussian noises (− 1 < κ < 0). The estimated ratio between spectral indices of GPS and SG is stable worldwide with a global median value of about 0.5. Concerning the power-law amplitudes, these are very consistent worldwide for the GPS position time series and fluctuate around 15 mm/year−κ/4, while in the case of SG records they spread between 60 and 300 nm/s2/year−κ/4. There are some SG stations as CA or SU with power-law amplitudes comparable to GPS (with free-air gradient being applied), but they are in the minority.

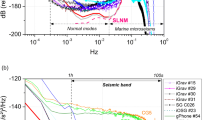
Power spectral densities (PSDs) estimated with the Welch algorithm for Cantley and Wuhan stations. Residuals of GPS and SG data are plotted in red and blue, respectively. The model of noise, which best characterizes the residuals is being fitted into original data and plotted in violet and black for, respectively, GPS and SG residuals. We chose those two station just for presentation purposes, however all PSDs were considered and analyzed in details

A histogram of power-law spectral indices estimated with the MLE approach for neighboring GPS-SG sites. Easy to notice is the fact that almost all GPS position time series follow fractional Gaussian noises, while gravity records are best characterized by fractional Brownian motion
Since the noises in GPS position time series are presently very well identified, the main noise characteristics of the various SG sites used in this research will be reconsidered here on the basis of past studies published so far related to inter-comparison of gravity and height changes at these sites.
The SG station at Brussels (Belgium) has been stopped in 2000. Brussels’ instrument had a problem of calibration (Ducarme et al. 2002) and its data contained many disturbances. Besides, the site condition was difficult resulting in a high noise level (Rosat et al. 2004). The SG station BE we employed, is characterized by the spectral index of − 1.64 and relatively high power-law noise amplitude of 230 nm/s2/year−κ/4, confirming the findings of Rosat et al. (2004). The character of power-law explains all the power of the series from the lowest frequencies up to 140 cpy. The neighboring GPS station BRUS is characterized by the spectral index of − 0.61 and the amplitude of noise of 10.55 mm/year−κ/4, being the lowest amplitude of all examined stations.
Bad Homburg (Germany, Wziontek et al. 2017a) has been hosting several SG instruments with comparable noise levels (Rosat and Hinderer 2011). Wziontek et al. (2009) have shown that the gravity time series at Bad Homburg reflects only the global effects (attraction and loading) of hydrological water content. They concluded that the environmental characteristics of this station require some careful measurements on the site in order to correctly quantify the local hydrological effects. The BH SG station is characterized by the spectral index of a power-law of − 1.52 and the amplitude of the noise equal to 155.89 nm/s2/year−κ/4. This character of power-law noise explains well the frequencies ranging between 10 and 140 cpy. The neighboring GPS station BADH is affected by the power-law noise of spectral index of − 0.70 and the amplitude of 15.14 mm/year−κ/4.
At Cantley (Canada), many fluctuations in the seismic noise level can be noticed because of the ocean noise that is noticeably higher during the winter than it is during the summer (see e.g. Rosat and Hinderer 2011). In the summer, the noise level is minimal. Cantley is relatively close to the ocean side so the difference between summer and winter noise level is crucial. The same, however, holds also for intra-continental locations, like the Pannonian basin, as it was shown by e.g. Papp et al. (2012). Bower and Courtier (1998) showed that strong irregular seasonal variations due to changes in the nearby water table level and snow melting induce fast rises in the time series affecting gravity in the frequency range from days to seasons. For SG data we employed in this research, the spectral index estimated for gravity records was the lowest and equal to − 1.69 with the power-law noise amplitude of 63.60 nm/s2/year−κ/4. Power-law character of residuals for CA is definitely much more appropriate than a white noise assumption. This means, (not only in case of this station) that the residuals still contain unmodeled constituents/signals from mismodelling or of not deterministic type which may subjected for further research by the spatio-temporal filtering (Gruszczynski et al. 2016). It fits the PSD well explaining all power in the entire frequency band (Fig. 3). Fraction of power-law noise for Cantley is equal to 0.99 (Table 2), meaning that there is a little contribution of pure white noise to the combination we assumed in this research. The neighboring GPS station CAGS is characterized by spectral index of − 0.66 and a power-law amplitude of 4.23 mm/year−κ/4. Fraction of power-law noise is equal to 0.97.
At Canberra (Australia), the noise level is quite stable within one sigma, since Canberra is stated as one of the quietest SG sites (Rosat and Hinderer 2011). For gravity records, the spectral index of power-law noise was estimated to be equal to − 1.64 with the noise amplitude of 151.82 nm/s2/year−κ/4. Fraction of power-law noise was equal to 1, meaning that there is no contribution of white noise into the combination we assumed. A combination of power-law and white noise fitted into PSD of residuals, explains well the power for frequencies between 10 and 100 cpy. For the GPS height changes, the spectral index was estimated to be equal to − 0.52 with noise amplitude of 11.77 mm/year−κ/4. Power-law noise contributed to the combination in 100%.
The Moxa (Germany) gravimetric observatory is a quiet site, but with a hydrological situation rather complicated (Naujoks et al. 2010). The quietest days in terms of seismic noise magnitude were observed in spring between the years 2000 and 2009 (Rosat and Hinderer 2011). The M1 station we analyzed, has a character of the power-law noise with the spectral index of − 1.52 and amplitude equal to 150.71 nm/s2/year−κ/4. The power-law character fits well the power between 10 and 140 cpy. The neighboring GPS station MOX2 was estimated to be well described by the spectral index of − 0.51 and the amplitude of power-law noise of 17.83 mm/year−κ/4. The power-law noise contribution into the combination we assumed is equal to 100%.
At Membach (Belgium) station, the hydrological signal is known to be strong (e.g. Van Camp et al. 2006). Van Camp et al. (2010) stated that the hydrological effects play an important role on the observed structure of the PSD. They have shown that after reducing the observed SG residuals from the local hydrological correction of Van Camp et al. (2006), the PSD becomes slightly flatter at frequencies below 10−7 Hz. Van Camp et al. (2005) have also proposed several noise models (white, first-order Gauss-Markov, fractional Brownian and flicker) with a slope of − 2.1. In the following research, the MB station was found to be characterized the best by the slope of the power-law noise of − 1.54 and the amplitude of 172.62 nm/s2/year−κ/4. Difference may arise due to the longer time series available in our research. The power of data is quite flat between 1 to 10 cpy and between 140 and 180 cpy, meaning that white noise is appropriate to describe the frequencies in these bands. For frequencies between 10 and 140 cpy, the power-law noise of the slope of − 1.54 explains the frequencies well. The neighboring GPS station ROET was estimated to have the spectral index of − 0.71 and the power-law amplitude of 14.86 mm/year−κ/4 with a contribution of power-law noise of 100%.
The noise level at SG station in Medicina (Italy, Wziontek et al. 2017b) is at the medium level comparing to other SG stations. Large seasonal fluctuations have indeed been observed in the SG and GPS data series that are caused by seasonal fluctuations in the atmosphere, ocean, and ground water, but also by geo-mechanical effects such as soil consolidation and thermal expansion of the structure supporting the GPS antenna (Zerbini et al. 2001; Romagnoli et al. 2003; Richter et al. 2004). Similar to Bad-Homburg, the local hydrological effects are not well represented by global model, but need some site-specific measurements (Wziontek et al. 2009). Indeed Zerbini et al. (2001) had shown that the gravity signal is highly correlated with a nearby water table, located a few meters underneath the SG. For MC station, the spectral index was estimated to be equal to − 1.58, while the power-law noise amplitude: 151.65 nm/s2/year−κ/4. Fraction of power-law noise is equal to 1. Again, the combination of power-law and white noise explains well all frequencies between 9 and 100 cpy. For MEDI GPS station, the stochastic part has a character of power-law noise with the spectral index equal to − 0.65, and power-law noise amplitude of 13.25 mm/year−κ/4 with 61.5% fraction.
The noise level at Metsahovi (Finland) is stable over time within one sigma. Virtanen (2001) used gravity variations from Metsahovi to decide on an influence of local, regional and global hydrology. He found that gravity records are well-correlated with groundwater and Watershed Simulation and Forecasting System for Finland. Virtanen (2004) studied the effect of atmospheric loading and the Baltic Sea on the gravity and height data. He showed that this effect explains nearly 40% of the variance of daily GPS height solutions. For SG gravity records, the spectral index we estimated in this research was equal to − 1.63 with the amplitude of noise of 252.75 nm/s2/year−κ/4. Fraction of power-law noise in the assumed combination was equal to 1, meaning that white noise did not contribute to the stochastic part character. From the analysis of PSD, it is clear that the power-law noise effectively explains the power between 10 and 140 cpy. The GPS station METS is characterized by the spectral index of power-law of − 1.02 (pure flicker), amplitude of 20.37 mm/year−κ/4 and fraction of 99.9%.
Ny-Alesund (Spitzbergen, Norway) is located in the Svalbard archipelago, which is affected by post-glacial rebound subsequent to the last Pleistocene deglaciation that started 21,000 years ago and ended 10,000 years ago. Besides this glacial isostatic adjustment, the present-day ice melting can be observed (Kohler et al. 2007). Both effects induce deformation of the Earth. The proximity of this site to the ocean makes it a rather noisy in terms of PSD levels among the other SG stations. Sato et al. (2006) analyzed 4 years of gravity data obtained from the superconducting gravimeter at Ny-Alesund and showed a clear correlation with the computed hydrological effects (i.e. the effects of soil moisture and snow). They also showed that the vertical motion obtained from GPS measurements carried out near the gravity station shows seasonal variations that are consistent with the gravity data at least in their sign. In our research we did not confirmed this statement with 40 nm/s2 and 1 mm of annual amplitude for SG and GPS, respectively. The NY station is characterized by the spectral index of − 1.59 and the largest power-law noise amplitude from all analyzed data of 309.92 nm/s2/year−κ/4. Fraction of power-law noise was estimated as 1. The power-law noise effectively explains all frequencies between 10 and 140 cpy. The NYAL station is characterized by the spectral index of − 0.81 and the power-law noise amplitude of 19.10 mm/year−κ/4. The power-law noise contributes into the stochastic part in 51.5%.
Onsala (Sweden) is located near the North Sea resulting in a larger noise at seismic frequencies (Rosat and Hinderer 2011). Seasonal perturbations are mostly due to the vegetation and the land undergoes an uplift due to the ongoing glacial isostatic adjustment in Fennoscandia (Timmen et al. 2015). The SG OS data we analyzed are characterized by a large drift between 2009 and 2012, while for 2012–2015 no drift was noticed. Looking at the properties of stochastic part, the OS station is well explained by the power-law noise of spectral index of − 1.60 and the amplitude of 234.51 nm/s2/year −κ/4, meaning a high noise level. This character fits all the frequencies up to 140 cpy. The GPS station ONSA was found to be explained by the power-law of the spectral index of − 0.76, amplitude of power-law noise of 13.91 mm/year−κ/4 and fraction of 67.8%.
The Pecny (Czech Republic) station is located in a quiet place, far away from industrial or oceanic noise (Pálinkás and Kostelecký 2010). This fact is confirmed in this analysis by the amplitude of power-law noise equal to 121.91 nm/s2/year −κ/4, being relatively small in comparison to the amplitudes of other SG stations. Also, the spectral index of the power-law noise is one of the largest (closest to zero, which indicates white noise) and equal to − 1.46. Looking at the PSD, the power-law noise explains well all frequencies between 10 and 100 cpy. The GOPE GPS station is characterized by the spectral index of − 0.80, the amplitude of noise of 15.34 mm/year−κ/4 and fraction of 47.2%.
The site conditions at Potsdam (Germany, Neumeyer et al. 2017) station made it a rather noisy site (Rosat et al. 2004). The station was stopped in 1998. The PO SG station with a four years of data, was found to be well explained by the power-law noise of the spectral index of − 1.25, being one of the largest and therefore, the closest to white noise character. However, this can arise from too short time span of observations. As was stated by Williams et al. (2004) too short data span may result in the fact that the white noise covers the character of power-law noise, hiding the power-law noise within. The amplitude of power-law noise was explained to be equal to 116.66 nm/s2/year−κ/4. The neighboring GPS station POTS was found to be well-explained by the spectral index of the power-law noise of − 0.76 and the amplitude of 15.89 mm/year−κ/4. The power-law noise contributes to the character of stochastic part of both GPS and SG stations in 100%.
The J9 Gravimetric Observatory of Strasbourg (France, Boy et al. 2017) has shown to be among the quietest sites in the worldwide network of SGs (Rosat and Hinderer 2011). The SG time-records at Strasbourg site is today, with the Membach and Metsahovi time-records, one of the longest time series recorded by SG with a long-term time-stability that has enabled a wide range of geophysical applications (Calvo et al. 2016). The ST station we analyzed, is the best characterized by the spectral index of − 1.58 and the amplitude of power-law noise of 160.87 nm/s2/year−κ/4. The power-law noise explains very well the frequencies between 1 and 140 cpy, being much more preferred than the white noise model. The ENTZ GPS station, was found to be described by the power-law noise of the spectral index of − 0.78 and the amplitude of 16.38 mm/year−κ/4. The contribution of the power-law noise into the combination we assumed was equal to 95% for both series.
The Sutherland (South Africa, Förste et al. 2016) station is situated on bedrock on a plateau. Contrary to other sites considered in this paper, Sutherland station is a dry site located in the savanna (Kroner et al. 2009). A correlation between the seasonal variation caused by the non-tidal oceanic mass redistribution and gravity residuals was observed by Kroner et al. (2009). The SG records of SU are characterized by almost the largest spectral index of − 1.25 and one of the smallest amplitudes of power-law noise of 61.39 nm/s2/year−κ/4. These numbers prove that due to the lack of local hydrologically-related phenomena, this station is much more stable than any other from SG sites. From the analysis of PSD, we noticed, that the power-law noise explains all frequencies from the lowest up to 140 cpy. Also, the SYOG GPS station is characterized by the largest spectral index of − 0.57 from the sites we employed in this analysis and one of the smallest noise amplitudes of 12.37 mm/year−κ/4. For both SG and GPS, the power-law noise contributes in 100% to the stochastic part.
Syowa (Antarctica) site is located on a small island only several hundred meters from the coast. Hence the ocean tidal effects are large (Iwano et al. 2005) and Doi et al. (2008) showed that seasonal sea level changes significantly affect gravity. They obtained a response coefficient with the nearby tide-gauge data of about 0.7 nm/s2/cm. Because of the oceans, this site has a higher noise level than most of the SG sites. The SY SG station is characterized by a power-law noise of the spectral index of − 1.10, being the largest spectral index from all of analyzed stations, and amplitude of noise of 159.76 nm/s2/year−κ/4. The contribution of power-law noise into the assumed combination is equal to 1. Power-law noise fits the PSD very well for frequencies between the lowest until 140 cpy. The SYOG GPS station is characterized by the spectral index of − 0.57, the amplitude of noise of 12.37 mm/year−κ/4 and fraction of 92%.
Vienna (Austria) station was a very good site-sensor combination in terms of noise levels (Rosat et al. 2004). It was located about 800 km far from the North-Sea coast. The instrument was stopped in 2006 to be moved to the Conrad observatory outside the city. Meurers et al. (2007) have applied a rainfall model to successfully decrease the standard deviation of the gravity residuals at Vienna and Membach stations. The VI SG station was found to be characterized by the power-law noise of the spectral index of − 1.56 and the amplitude of power-law noise equal to 148.19 nm/s2/year−κ/4. The power-law noise explains very well the frequencies between 10 and 140 cpy. The neighboring GPS station WIEN, is characterized by the power-law noise of slope of − 0.91, amplitude of 19.64 mm/year−κ/4 and fraction of 44.6%.
The Wettzell (Germany, Wziontek et al. 2017c) SG station is situated on bedrock on a plateau. Long-term gravity changes at this site have been already successfully correlated with local hydrological effects (Kroner et al. 2009). The WE SG station is characterized by the spectral index of power-law noise of − 1.53 and the amplitude of noise of 110.65 nm/s2/year−κ/4. Fraction of power-law noise is equal to 1. Looking at the PSD, for WE station, the power-law noise effectively explains all power in the entire frequency band. The WTZR GPS station which is neighboring to WE, is characterized by the spectral index of − 0.83, the noise amplitude of 15.79 mm/year−κ/4 and fraction of 76.7%.
The Wuhan (China) SG station is situated about 25 km away from the city center since late 1997 (Sun et al. 2002). Few studies have been published about this site (e.g. Sun et al. 2004), however to the best of our knowledge none of them described the noise context or the comparison with GPS data. In our study, for WU SG station, the spectral index of power-law noise was estimated to be equal to − 1.53 with the amplitude of noise equal to 110.65 nm/s2/year−κ/4. Fraction of power-law noise is equal to 1. Looking at the PSD (Fig. 3), we noticed that the power-law noise fits well the power of low frequencies up to 100 cpy. For the neighboring WUHN GPS station, the power-law character was estimated to have the spectral index of − 0.86, the amplitude of 16.42 mm/year−κ/4 and the smallest fraction among GPS observations of 26.1%.
As we showed, there are clear differences between the noise parameters estimated for the residuals of the individual techniques. Figure 4 presents the histograms of spectral indices for particular measurement techniques while Fig. 5—their geographical layout. It is easy to notice, that non-integer spectral indices of SG stations fall into fractional Brownian motion (− 2 < κ < − 1), with the spectral index being varied between − 1.69 and − 1.10, while of GPS into fractional Gaussian noises of − 1.02 to − 0.51-ranged spectral indices. This might be due to the fact that GPS is sensitive to changes in large-scale phenomena related to mismodelling of EOPs, orbits, satellite antenna PCV or hydrodynamics as large scale atmospheric or hydrological effects (Dong et al. 2006), while SG is extremely sensitive to local influences, mostly due to the changes in the continental water storage (e.g. Van Camp et al. 2006; Longuevergne et al. 2009; Naujoks et al. 2010 or Creutzfeldt et al. 2010). As it was previously emphasized hydrology-induced gravity variation is the only factor limiting the observations from SGs to be used for geodynamical purposes (Mikolaj et al. 2015) as the contribution of hydrosphere is station-dependent (Wziontek et al. 2009).

Geographical distribution of the spectral indices of the residual data obtained from GPS (top) and SG (bottom) observations
5 Discussion and conclusions
In the presented study, we estimated the character of stochastic part of neighboring GPS-SG stations. We followed the idea given in the paper by Agnew (1992) who stated, that a power-law is the preferred noise model for geophysical phenomena and, consequently, for their geodetic observables. We compared the parameters derived with Maximum Likelihood Estimation for a combination of power-law and white noise and, also, the character of PSDs estimated with the Welch algorithm. GPS data and SG gravity records can be both characterized by the power-law noise, what means that both observables are well-correlated with each other. However, no papers have been published so far about the preferred noise models of SG residuals, while the fact, that the GPS position time series follow the combination of power-law and white noise has been widely discussed. For gravity records, this statement is a new one, and is much more favorable than the assumption of white noise only. Van Camp et al. (2010) have shown that at very long periods below 2 cpy, the PSD of SG data should become flat (white noise) if the hydrological effects are correctly removed, but at higher frequencies, the PSD of noise still remains colored. However, Zhen et al. (2017) demonstrated that the hydrological loading from Global Land Surface Discharge Model (LSDM) contributes to the low frequency components between 0.7 and 1.4 cpy, not to the overall shape of power spectral density. Up until now, a pure white noise has been used, which does not fit the residuals at all. At least the assumption of a combination of power-law and white noise should be made before parameters of deterministic part (periodicities or trend) are estimated with their significance.
The noise analysis, we have performed, showed that the spectral indices of power-law noise estimated for SG stations are close to random-walk, which means that the effects characterized by fractional Brownian motion affects the gravity records the most. This, in turn, might indicate local influences. The spectral indices of the power-law noise estimated for GPS position time series ranging within fractional Gaussian part with the flicker noise being dominated. In both cases the covariance matrix of the unknown parameters of the deterministic model became more complex in comparison to the one of white noise (Williams 2003). We found, than the spectral indices are consistent within a particular technique, unlike the amplitudes of power-law noise, quite regular in case of GPS and very scattered in SG, which also may be an evidence of local influences. We confirmed this based on the previously performed research since the quantification of those impacts on noise parameters is beyond this study. The main finding of our research is that the assumption of power-law noise is much more preferred for SG data than the assumption of a pure white noise being used until now.
Finally, we cross-compared the properties of PSD estimated for gravity and GPS time series from 18 globally distributed GPS-SG neighboring sites. It can be noticed that at the very long periods, the power of PSDs is still increasing when the frequency decreases. However, it should be emphasized that the combination of GPS and gravity data must then be considered carefully as they are differently sensitive for the geophysical processes, which can be easily noticed by the diverse fractions in the combination of power-law and white noise. In the case of gravity records power-law noises constitute 100% of fraction in all considered cases with just one exception (99.9%), while in GPS-derived height time series it varies from 26.1 to 99.9%.
In the future, more stochastic models are going to be tested in the context if there is the preferred stochastic model describing the SG data better than the power-law noise does. For now, we proved that the assumption of power-law noise gives much better estimates of the stochastic properties of SG data than the pure white noise itself. Such noise model could be used in the future to determine time and space characteristic scales of hydrological signals affecting SG data.
References
Agnew DC (1992) The time-domain behaviour of power-law noises. Geophys Res Lett 19(4):333–336
Agnew DC, Larson KM (2007) Finding the repeat times of the GPS constellation. GPS Solut 11(1):71–76. https://doi.org/10.1007/s10291-006-0038-4
Altamimi Z, Rebischung P, Métivier L, Collilieux X (2016) ITRF2014: a new release of the international terrestrial reference frame modeling nonlinear station motions. J Geophys Res-Sol EA. https://doi.org/10.1002/2016jb013098
Amiri-Simkooei AR, Tiberius CCJM, Teunissen PJG (2007) Assessment of noise in GPS coordinate time series: methodology and results. J Geophys Res 112:B07413. https://doi.org/10.1029/2006JB004913
Banka D, Crossley D (1999) Noise levels of superconducting gravimeters at seismic frequencies. Geophys J Int 139:87–97
Bevis M, Brown A (2014) Trajectory models and reference frames for crustal motion geodesy. J Geodesy 88:283–311. https://doi.org/10.1007/s00190-013-0685-5
Bogusz J (2015) Geodetic aspects of GPS permanent stations non-linearity studies. Acta Geodyn Geomater 12(4(180)):323–333. https://doi.org/10.13168/agg.2015.0033
Bogusz J, Klos A (2016) On the significance of periodic signals in noise analysis of GPS station coordinates time series. GPS Solut 20(4):655–664. https://doi.org/10.1007/s10291-015-0478-9
Bogusz J, Klos A, Kosek W (2013) Wavelet decomposition in the Earth’s gravity field investigation. Acta Geodyn Geomater 101(169):47–59. https://doi.org/10.13168/agg.2013.0004
Bos MS, Fernandes RMS, Williams SDP, Bastos L (2008) Fast error analysis of continuous GPS observations. J Geodesy 82:157–166. https://doi.org/10.1007/s00190-007-0165-x
Bos MS, Fernandes RMS, Williams SDP, Bastos L (2013) Fast error analysis of continuous GNSS observations with missing data. J Geodesy 87(4):351–360. https://doi.org/10.1007/s00190-012-0605-0
Bower DR, Courtier N (1998) Precipitation effects on gravity measurements at the Canadian Absolute Gravity Site. Phys Earth Planet Inter 106(3–4):353–369. https://doi.org/10.1016/S0031-9201(97)00101-5
Boy J-P, Hinderer J (2006) Study of the seasonal gravity signal in superconducting gravimeter data. J Geodyn 41:227–233
Boy J-P, Rosat S, Hinderer J, Littel F (2017) Superconducting gravimeter data from Strasbourg—level 1. GFZ Data Serv. https://doi.org/10.5880/igets.st.l1.001
Calvo M, Rosat S, Hinderer J (2016) Tidal spectroscopy from a long record of superconducting gravimeters in Strasbourg (France). Int Assoc Geodesy Symp. https://doi.org/10.1007/1345_2016_223
Creutzfeldt B, Güntner A, Klügel T, Wziontek H (2008) Simulating the influence of water storage changes on the superconducting gravimeter of the Geodetic Observatory Wettzell,Germany. Geophysics 73(6):WA95–WA104. https://doi.org/10.1190/1.2992508
Creutzfeldt B, Güntner A, Wziontek H, Merz B (2010) Reducing local hydrology from high precision gravity measurements: a lysimeter approach. Geophys J Int 183(1):178–187. https://doi.org/10.1111/j.1365-246X.2010.04742.x
Crossley D, Hinderer J (2008) The contribution of GGP superconducting gravimeters to GGOS. Int Assoc Geodesy Symp 133:841–852. https://doi.org/10.1007/978-3-540-85426-5_97
De Linage C, Hinderer J, Boy J-P (2009) Variability of the gravity-to-height ratio due to surface loads. Pure Appl Geophys 166:1217–1245
Dehant V, Defraigne P, Wahr JM (1999) Tides for a convective Earth. J Geophys Res 104(B1):1035–1058
Doi K, Shibuya K, Ikeda H, Fukuda Y (2008) Continuous gravity observation with the superconducting gravimeter CT #043 at Syowa Station, Antarctica. In: Capra A, Dietrich R (eds) Geodetic and geophysical observations in Antarctica. Springer, Berlin, pp 237–247. https://doi.org/10.1007/978-3-540-74882-3_13
Dong D, Fang P, Bock Y, Cheng MK, Miyazaki S (2002) Anatomy of apparent seasonal variations from GPS-derived site position time series. J Geophys Res 107(B4):1–17. https://doi.org/10.1029/2001JB000573
Dong D, Fang P, Bock Y, Webb F, Prawirodirdjo L, Kedar S, Jamason P (2006) Spatiotemporal filtering using principal component analysis and Karhunen–Loeve expansion approaches for regional GPS network analysis. J Geophys Res 111:B03405. https://doi.org/10.1029/2005JB003806
Drewes H, Kuglitsch F, Adám J, Rózsa S (2016) The Geodesist’s handbook 2016. J Geodesy 90(10):907–1205. https://doi.org/10.1007/s00190-016-0948-z
Ducarme B, Sun H-P, Xu J-Q (2002) New investigation of tidal gravity results from the GGP network. Bull Inf Marées Terr 136:10761–10776
Förste C, Voigt C, Abe M, Kroner C, Neumeyer J, Pflug H, Fourie P (2016) Superconducting gravimeter data from Sutherland—level 1. GFZ Data Serv. https://doi.org/10.5880/igets.su.l1.001
Gazeaux J, Williams SDP, King M, Bos MS, Dach R, Deo M, Moore AW, Ostini L, Petrie E, Roggero M, Teferle FN, Olivares G, Webb FH (2013) Detecting offsets in GPS time series: first results from the detection of offsets in GPS experiment. J Geophys Res-Sol EA 118:2397–2407. https://doi.org/10.1002/jgrb.50152
Gruszczynski M, Klos A, Bogusz J (2016) Orthogonal transformation in extracting of common mode errors from continuous GPS networks. Acta Geodyn Geomater 13(3(183)):291–298. https://doi.org/10.13168/agg.2016.0011
Hartmann T, Wenzel H-G (1995) The HW95 tidal potential catalogue. Geophys Res Lett 22(24):3553–3556
Hinderer J, Crossley D (2000) Time variations in gravity and inferences on the Earth’s structure and dynamics. Surv Geophys 21:1–45
Hinderer J, Rosat S, Crossley D, Amalvict M, Boy J-P, Gégout P (2002) Influence of different processing methods on the retrieval of gravity signals from GGP data. Bull Inf Marées Terr 135:10653–10668
Hinderer J, Crossley D, Warburton RJ (2007) Superconducting gravimetry. In: Herring T, Schubert G (eds) Treatise on geophysics, vol 3. Elsevier, Amsterdam, pp 65–122
Iwano S, Fukuda Y, Sato T, Tamura Y, Matsumoto K, Shibuya K (2005) Long-period tidal factors at Antarctica Syowa station determined from 10 years of superconducting gravimeter data. J Geophys Res 110:B10403. https://doi.org/10.1029/2004JB03551
Klos A, Bogusz J, Figurski M, Gruszczynska M, Gruszczynski M (2015) Investigation of noises in the weekly time series. Acta Geodyn Geomater 12(2(178)):117–126. https://doi.org/10.13168/agg.2015.0010
Klos A, Bogusz J, Figurski M, Kosek W (2016) On the handling of outliers in the GNSS time series by means of the noise and probability analysis. Int Assoc Geodesy Symp 143:657–664. https://doi.org/10.1007/1345_2015_78
Klos A, Bos MS, Bogusz J (2018) Detecting time-varying seasonal signal in GPS position time series with different noise levels. GPS Solut. https://doi.org/10.1007/s10291-017-0686-6
Kohler J, James TD, Murray T, Nuth C, Brandt O, Barrand NE, Aas HF, Luckman A (2007) Acceleration in thinning rate on western Svalbard glaciers. Geophys Res Lett 34:L18502. https://doi.org/10.1029/2007GL030681
Kreemer C, Blewitt G, Klein DC (2014) A geodetic plate motion and global strain rate model. Geochem Geophys Geosyst 15:3849–3889. https://doi.org/10.1002/2014GC005407
Kroner C, Thomas M, Dobslaw H, Abe M, Weise A (2009) Seasonal effects of non-tidal oceanic mass shifts in observations with superconducting gravimeters. J Geodyn 48:354–359. https://doi.org/10.1016/j.jog.2009.09.009
Langbein J, Bock Y (2004) High-rate real-time GPS network at Parkfield: utility for detecting fault slip and seismic displacements. Geophys Res Lett 31:L15S20. https://doi.org/10.1029/2003gl019408
Langbein J, Johnson H (1997) Correlated errors in geodetic time series: implications for time-dependent deformation. J Geophys Res 102(B1):591–603
Longuevergne L, Boy J-P, Florsch N, Viville D, Ferhat G, Ulrich P, Luck B, Hinderer J (2009) Local and global hydrological contributions to gravity variations observed in Strasbourg (France). J Geodyn 48(3–5):189–194. https://doi.org/10.1016/j.jog.2009.09.008
Lyard F, Lefevre F, Letellier T, Francis O (2006) Modelling the global ocean tides: modern insights from FES2004. Ocean Dyn 56:394–415
Mandelbrot BB, Van Ness JW (1968) Fractional Brownian motions, fractional noises and applications. SIAM Rev 10(MR0242239):422–437
Mao A, Harrison CGA, Dixon TH (1999) Noise in GPS coordinate time series. J Geophys Res 104(B2):2797–2816
Meurers B, Van Camp M, Petermans T (2007) Correcting superconducting gravity time-series using rainfall modelling at the Vienna and Membach stations and application to Earth tide analysis. J Geodesy 81(11):703–712. https://doi.org/10.1007/s00190-007-0137-1
Mikolaj M, Meurers B, Mojzes M (2015) The reduction of hydrology-induced gravity variations at sites with insufficient hydrological instrumentation. Stud Geophys Geod 59(2015):424–437. https://doi.org/10.1007/s11200-014-0232-8
Naujoks M, Kroner C, Weise A, Jahr T, Krause P, Eisner S (2010) Evaluating local hydrological modeling by temporal gravity observations and a gravimetric three-dimensional model. Geophys J Int 182:233–249. https://doi.org/10.1111/j.1365-246X.2010.04615.x
Neumeyer J, Hagedoorn J, Leitloff J, Schmidt R (2004) Gravity reduction with three-dimensional atmospheric pressure data for precise ground gravity measurements. J Geodyn 38(3–5):437–450
Neumeyer J, Dittfeld H-J, Pflug H, Voigt C, Förste C (2017) Superconducting gravimeter data from Potsdam—level 1. GFZ Data Serv. https://doi.org/10.5880/igets.po.l1.001
Olsson PA, Milne G, Scherneck H-G, Agren J (2015) The relation between gravity rate of change and vertical displacement in previously glaciated areas. J Geodyn 83:76–84
Omang OCD, Kierulf HP (2011) Past and present-day ice mass variation on Svalbard revealed by superconducting gravimeter and GPS measurements. Geophys Res Lett 38:L22304. https://doi.org/10.1029/2011GL049266
Palinkas V, Kostelecky J (2010) Superconducting gravimeter OSG-050 at the Station Pecný, Czech Republic. Bull Inf Marées Terr 146:11819–11832
Papp G, Szűcs E, Battha L (2012) Preliminary analysis of the connection between ocean dynamics and the noise of gravity tide observed at the Sopronbánfalva Geodynamical Observatory, Hungary. J Geodyn 61(2012):47–56. https://doi.org/10.1016/j.jog.2012.07.004
Penna NT, Stewart MP (2003) Aliased tidal signatures in continuous GPS height time series. Geophys Res Lett 30(23):2184. https://doi.org/10.1029/2003GL018828
Rebischung P, Griffiths J, Ray J, Schmid R, Collilieux X, Garayt B (2012) IGS08: the IGS realization of ITRF2008. GPS Solut 16(4):483–494. https://doi.org/10.1007/s10291-011-0248-2
Richter B, Zerbini S, Matonti F, Simon D (2004) Long-term crustal deformation monitored by gravity and space techniques at Medicina, Italy and Wettzell, Germany. J Geodyn 38:281–292
Rogister Y, Memin A, Rosat S, Hinderer J, Calvo M (2016) Constraints provided by ground gravity observations on geocentre motions. Geophys J Int 206(2):1431–1439. https://doi.org/10.1093/gji/ggw220
Romagnoli C, Zerbini S, Lago L, Richter B, Simon D, Domenichini F, Elmi C, Ghirotti M (2003) Influence of soil consolidation and thermal expansion effects on height and gravity variations. J Geodyn 35:521–539
Rosat S, Hinderer J (2011) Noise levels of superconducting gravimeters: updated comparison and time stability. Bull Seismol Soc Am. https://doi.org/10.1785/0120100217
Rosat S, Hinderer J, Crossley D, Boy J-P (2004) Performance of superconducting gravimeters from long-period seismology to tides. J Geodyn 38(3–5):461–476
Rosat S, Boy J-P, Ferhat G, Hinderer J, Amalvict M, Gegout P, Luck B (2009) Analysis of a 10-year (1997–2007) record of time-varying gravity in Strasbourg using absolute and superconducting gravimeters: new results on the calibration and comparison with GPS height changes and hydrology. J Geodyn 48(3–5):360–365. https://doi.org/10.1016/j.jog.2009.09.026
Santamaria-Gomez A, Bouin M-N, Collilieux X, Woppelmann G (2011) Correlated errors in GPS position time series: implications for velocity estimates. J Geophys Res. https://doi.org/10.1029/2010JB007701
Sato T, Boy JP, Tamura Y, Matsumoto K, Asari K, Plag H-P, Francis O (2006) Gravity tide and seasonal gravity variation at Ny-Alesund, Svalbard in Arctic. J Geodyn 41:234–241
Segall P, Davis JL (1997) GPS applications for geodynamics and earthquake studies. Annu Rev Earth Planet Sci 25:301–336. https://doi.org/10.1146/annurev.earth.25.1.301
Sun H-P, Hsu H-T, Jentzsch G, Xu J-Q (2002) Tidal gravity observations obtained with a superconducting gravimeter at Wuhan/China and its application to geodynamics. J Geodyn 33:187–198
Sun H-P, Jentzsch G, Xu J-Q, Hsu H-Z, Chen X-D, Zhou J-C (2004) Earth’s free core nutation determined using C032 superconducting gravimeter at station Wuhan/China. J Geodyn 38:451–460
Teferle FN, Williams SDP, Kierulf HP, Bingley RM, Plag H-P (2008) A continuous GPS coordinate time series analysis strategy for high-accuracy vertical land movements. Phys Chem Earth 33:205–216. https://doi.org/10.1016/j.pce.2006.11.002
Timmen L, Engfeld A, Scherneck H-G (2015) Observed secular gravity trend at Onsala station with the FG5 gravimeter from Hannover. J Geod Sci 5:18–25. https://doi.org/10.1515/jogs-2015-0001
Van Camp M, Francis O (2006) Is the instrumental drift of superconducting gravimeters a linear or exponential function of time? J Geodesy 81:337–344. https://doi.org/10.1007/s00190-006-0110-4
Van Camp M, Vauterin P (2005) Tsoft: graphical and interactive software for the analysis of time series and Earth tides. Comput Geosci 31(5):631–640
Van Camp M, Williams SDP, Francis O (2005) Uncertainty of absolute gravity measurements. J Geophys Res 110:B05406. https://doi.org/10.1029/2004JB003497
Van Camp M, Vanclooster M, Crommen O, Petermans T, Verbeeck K, Meurers B, van Dam T, Dassargues A (2006) Hydrogeological investigations at the Membach station, Belgium and application to correct long periodic gravity variations. J Geophys Res-Sol EA 111:B10403. https://doi.org/10.1029/2006JB004405
Van Camp M, Metivier L, de Viron O, Meurers B, Williams SDP (2010) Characterizing long-time scale hydrological effects on gravity for improved distinction of tectonic signals. J Geophys Res 115:B07407. https://doi.org/10.1029/2009JB006615
Virtanen H (2001) Hydrological studies at the gravity station Metsahovi, Finland. J Geod Soc Jpn 47(1):328–333
Virtanen H (2004) Loading effects in Metsahovi from the atmosphere and the Baltic Sea. J Geodyn 38:407–422
Voigt C, Förste C, Wziontek H, Crossley D, Meurers B, Pálinkáš V, Hinderer J, Boy J-P, Barriot J-P, Sun H (2016) Report on the data base of the international geodynamics and earth tide service (IGETS). Scientific technical report STR Potsdam, GFZ German Research Centre for Geosciences, 24 p. https://doi.org/10.2312/gfz.b103-16087
Welch PD (1967) The use of Fast Fourier Transform for the estimation of power spectra: a method based on time averaging over short, modified periodograms. IEEE Trans Audio Electroacoust AU 15(2):70–73. https://doi.org/10.1109/tau.1967.1161901
Wenzel H-G (1996) The nanogal software: earth tide data processing package ETERNA 3.30. Bull Inf Marées Terr 124:9425–9439
Wessel P, Smith WHF, Scharroo R, Luis J, Wobbe F (2013) Generic mapping tools: improved version released. EOS Trans 94(45):409–410. https://doi.org/10.1002/2013EO450001
Williams SDP (2003) The effect of coloured noise on the uncertainties of rates estimated from geodetic time series. J Geod 76:483–494. https://doi.org/10.1007/s00190-002-0283-4
Williams SDP, Bock Y, Fang P, Jamason P, Nikolaidis RM, Prawirodirdjo L, Miller M, Johnson D (2004) Error analysis of continuous GPS position time series. J Geophys Res 109:B03412. https://doi.org/10.1029/2003JB002741
Wziontek H, Wilmes H, Wolf P, Werth S, Güntner A (2009) Time series of superconducting gravimeters and water storage variations from the global hydrology model WGHM. J Geodyn 48(3–5):166–171
Wziontek H, Wolf P, Nowak I, Richter B, Rülke A, Wilmes H (2017a) Superconducting Gravimeter data from Bad Homburg—level 1. GFZ Data Serv. https://doi.org/10.5880/igets.bh.l1.001
Wziontek H, Wolf P, Nowak I, Richter B, Rülke A, Schwahn W, Wilmes H, Zerbini S (2017b) Superconducting gravimeter data from Medicina—level 1. GFZ Data Serv. https://doi.org/10.5880/igets.mc.l1.001
Wziontek H, Wolf P, Nowak I, Richter B, Rülke A, Wilmes H (2017c) Superconducting Gravimeter data from Wettzell—Level 1. GFZ Data Serv. https://doi.org/10.5880/igets.we.l1.001
Zerbini S, Richter B, Negusini M, Romagnoli C, Simon D, Domenichini F, Schwahn W (2001) Height and gravity variations by continuous GPS, gravity and environmental parameter observations in the southern Po Plain, near Bologna, Italy. Earth Planet Sci Lett 192:267–279
Zhang J, Bock Y, Johnson H, Fang P, Williams SDP, Genrich J, Wdowinski S, Behr J (1997) Southern California permanent GPS geodetic array: error analysis of daily position estimates and site velocities. J Geophys Res 102(B8):18035–18055
Zhen L, Jianping Y, Wang L, Dekai L, Xiaogen L (2017) A comparison of hydrological deformation using GPS and global hydrological model for the Eurasian plate. Adv Space Res 60(3):587–596. https://doi.org/10.1016/j.asr.2017.04.023
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res-Atmos. https://doi.org/10.1029/96jb03860
Acknowledgements
The research was financed and supported by the National Science Centre in Poland through grant No. UMO-2014/15/B/ST10/03850 under the leadership of Prof. Janusz Bogusz. Dr. Gábor Papp for his insightful review and Dr. Simon Williams for very efficient discussions are gratefully acknowledged. We used free software: Eterna 3.4 package (Wenzel 1996), Generic Mapping Tool (Wessel et al. 2013), Hector (Bos et al. 2013), and TSoft (Van Camp and Vauterin 2005). GPS position time series were accessed from http://geodesy.unr.edu/. Gravimetric data were downloaded using website: http://isdc.gfz-potsdam.de/igets-data-base/. Ocean loading effects were calculated using http://holt.oso.chalmers.se/loading/.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Bogusz, J., Rosat, S., Klos, A. et al. On the noise characteristics of time series recorded with nearby located GPS receivers and superconducting gravity meters. Acta Geod Geophys 53, 201–220 (2018). https://doi.org/10.1007/s40328-018-0212-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40328-018-0212-5